https://cafe.naver.com/openrt/24231
[출처] 015 ROS의 종합 GUI 툴 RQt (오픈소스 소프트웨어 & 하드웨어: 로봇 기술 공유 카페 (오로카)) | 작성자 표윤석
1. RQt 프레임워크
프레임워크와 라이브러리의 차이점은 유튜브 노마드 코더 영상을 참고
https://www.youtube.com/watch?v=t9ccIykXTCM
RQt란?
- ROS 환경에서 사용할 수 있는 GUI 개발에 있어서 공통으로 필요한 부분들을 API형태로 제공
- Qt의 특징인 크로스 플랫폼과 다양한 프로그래밍 언어 지원이라는 특징을 그대로 반영
멀티윈도우의 필요성을 뼈저리게 느끼고 있다.
2. RQt 사용하기
-
rqt명령어를 통해 실행
 여러개를 실행 시킬 수도 있다.
여러개를 실행 시킬 수도 있다. -
ros2 run명령어를 통해 하나씩 실행
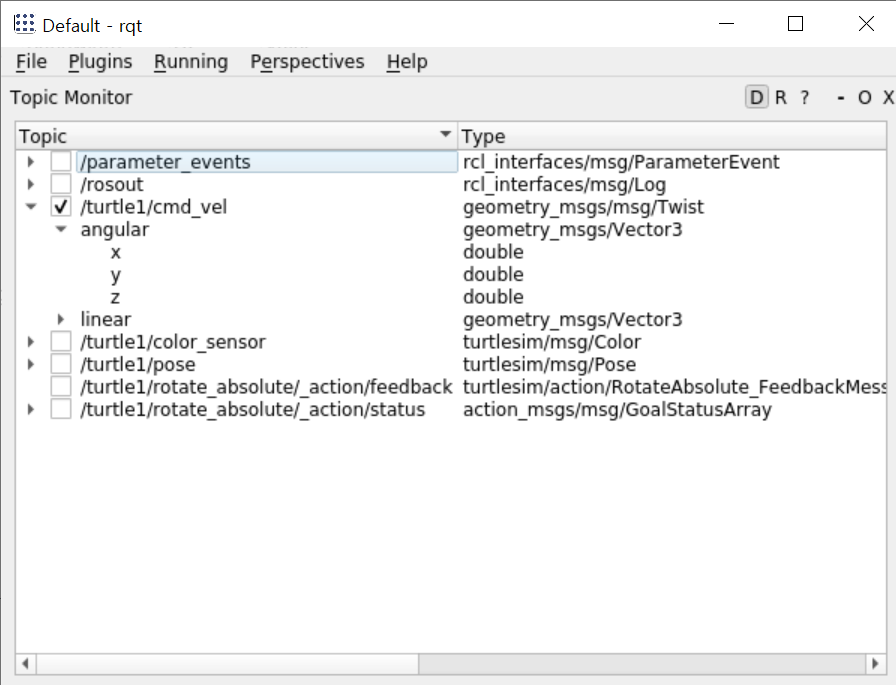
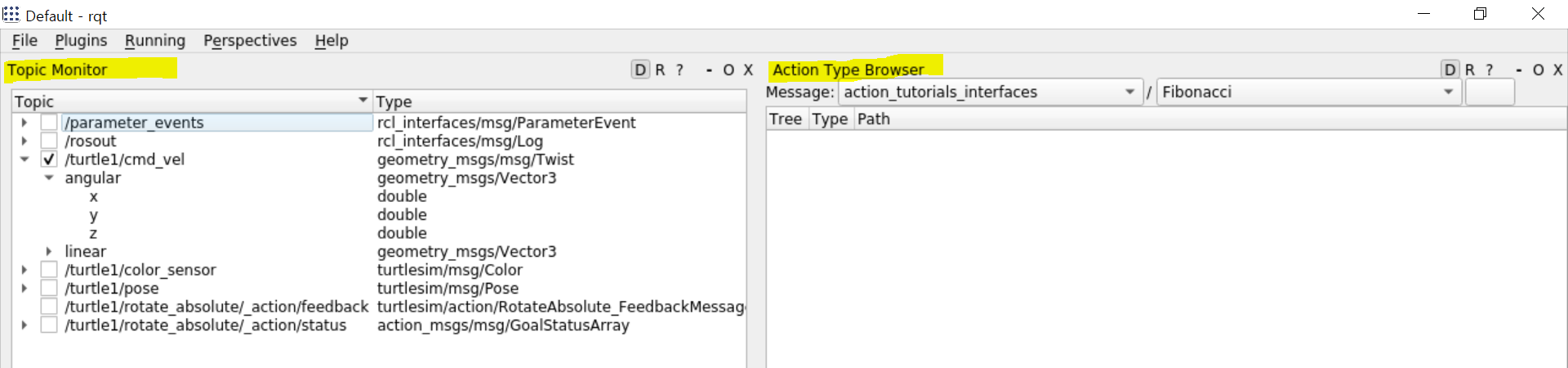
좌측은rqt를 통해 실행한 화면,
우측은ros run rqt_msg rqt_msg를 통해 실행한 화면이다.같은 정보를 찾을때
rqt는 플러그인을 실행하고 ,
ros run rqt_msg rqt_msg는turtlesim노드를 찾아갔다. -
단축키를 통한 실행 방법
앞서 살펴본
rqt_graph등이 단축키로 존재한다.
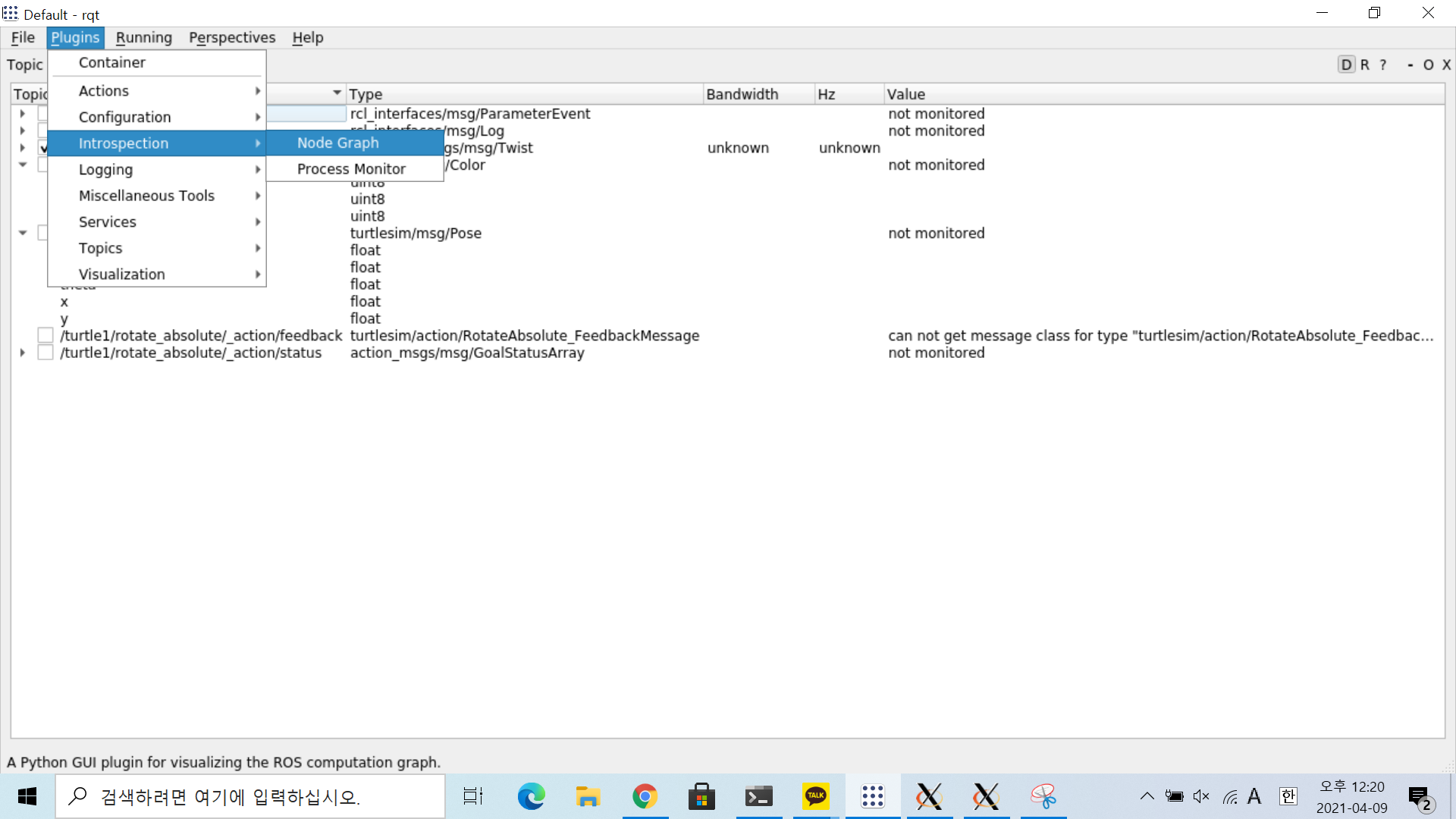
rqt에서rqt_graph를 실행하려면 해당 경로로 찾아가야 하지만, 단축키로 실행하면 바로 켤 수 있다.
3. 플러그인 사용 예시
-
messsage publisher
[Plugin] -> [Topics] -> [Message Publisher]
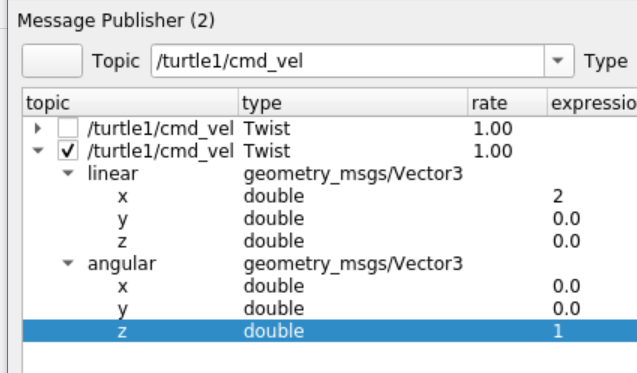
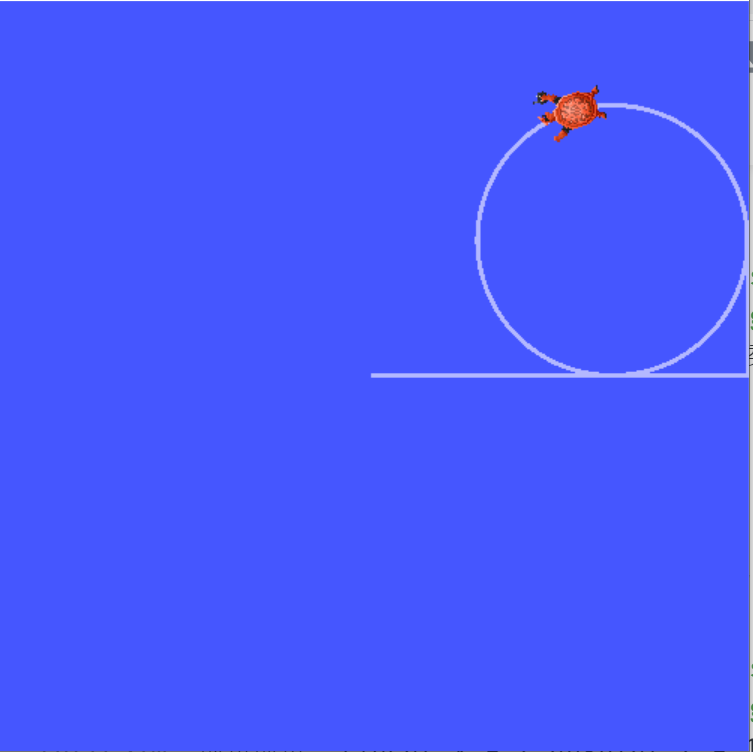
turtesim예시에서, linear_x = 2 angular_z = 1 을 주면 원으로 회전하는 것을 볼 수 있다.
freq.는 몇 hz당 한 번씩 토픽을 발행할지 결정하는 인자이다. -
service caller
[Plugin] -> [Services] -> [Service Caller]
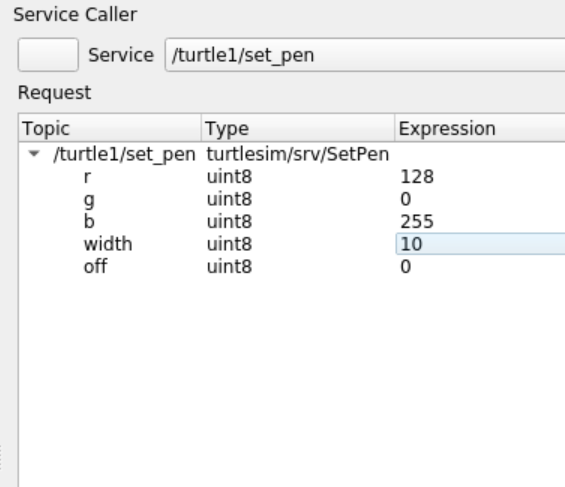
거북이 경로의 색을 바꾸고, 너비도 바꾸는 service를 요청한다.
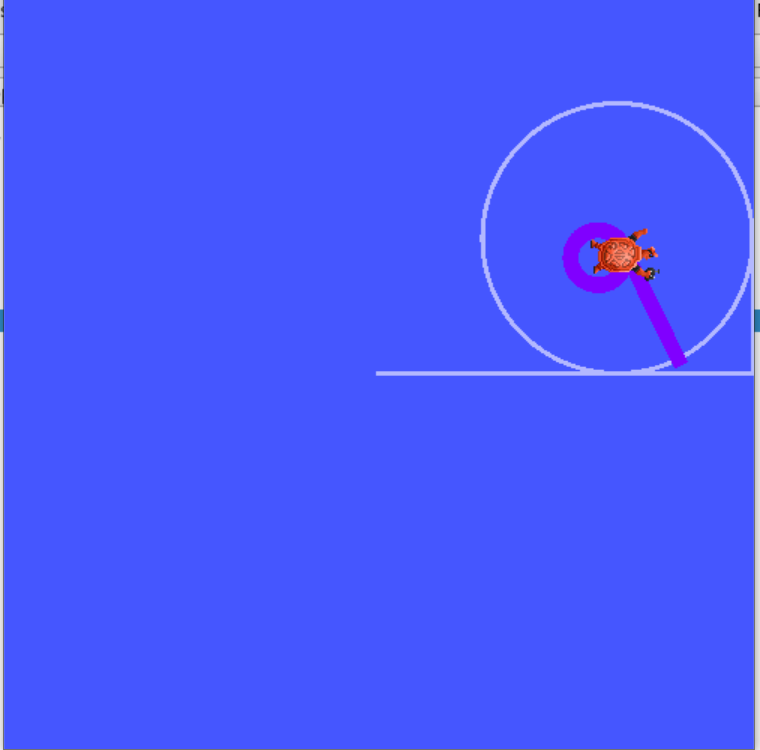
실행 결과 -
parameter reconfigure
[Plugin] -> [Configuration] -> [Dynamic Reconfigure]파라미터 값을 확인하고 변경할 수 있는 RQt 플러그인
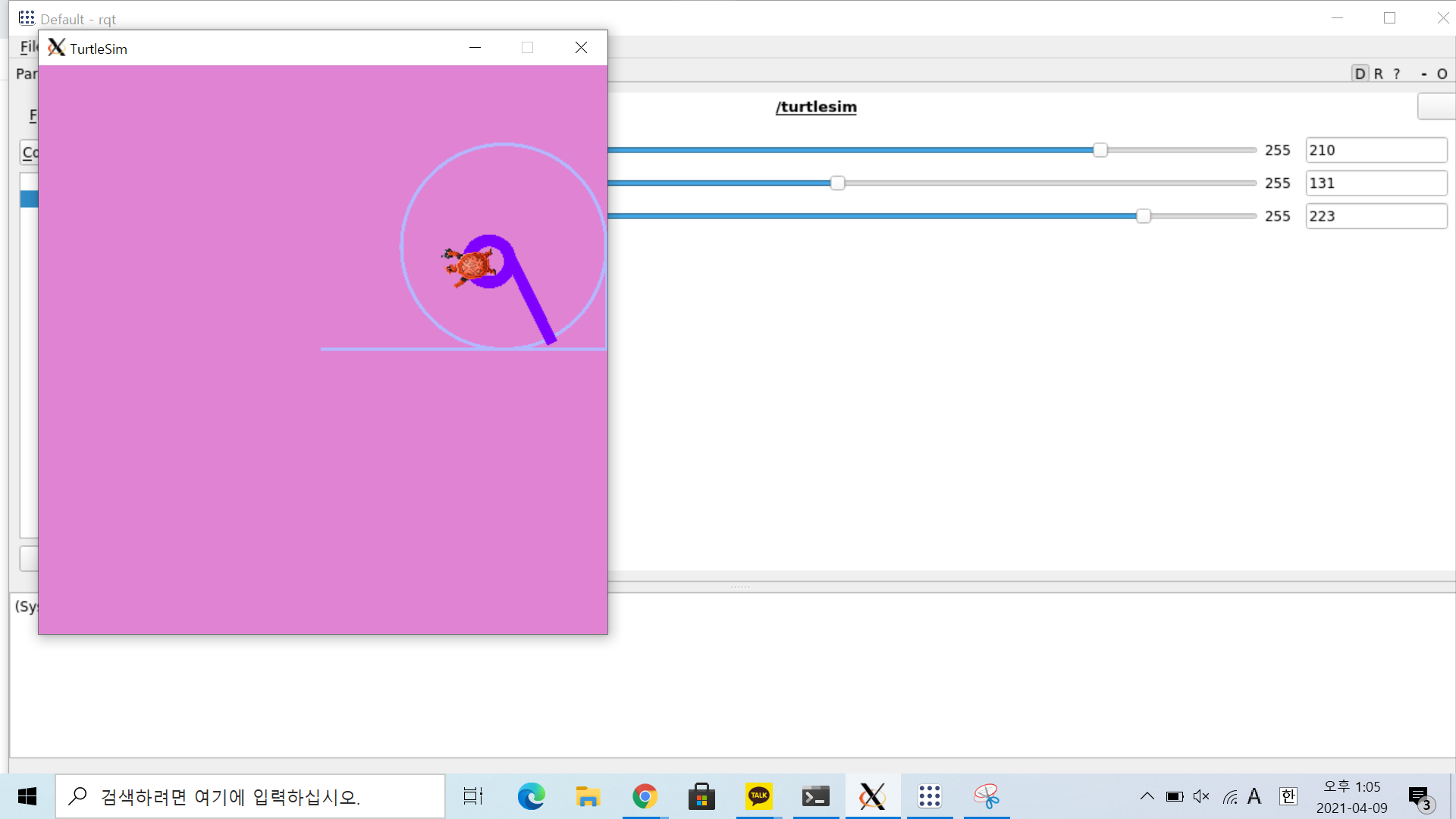
parameterbackground_color를 조절해 색을 변경할 수 있다. -
plot , image_view , console
image_view 의 경우
를 통해 움직이는 버거 이미지를 보내고,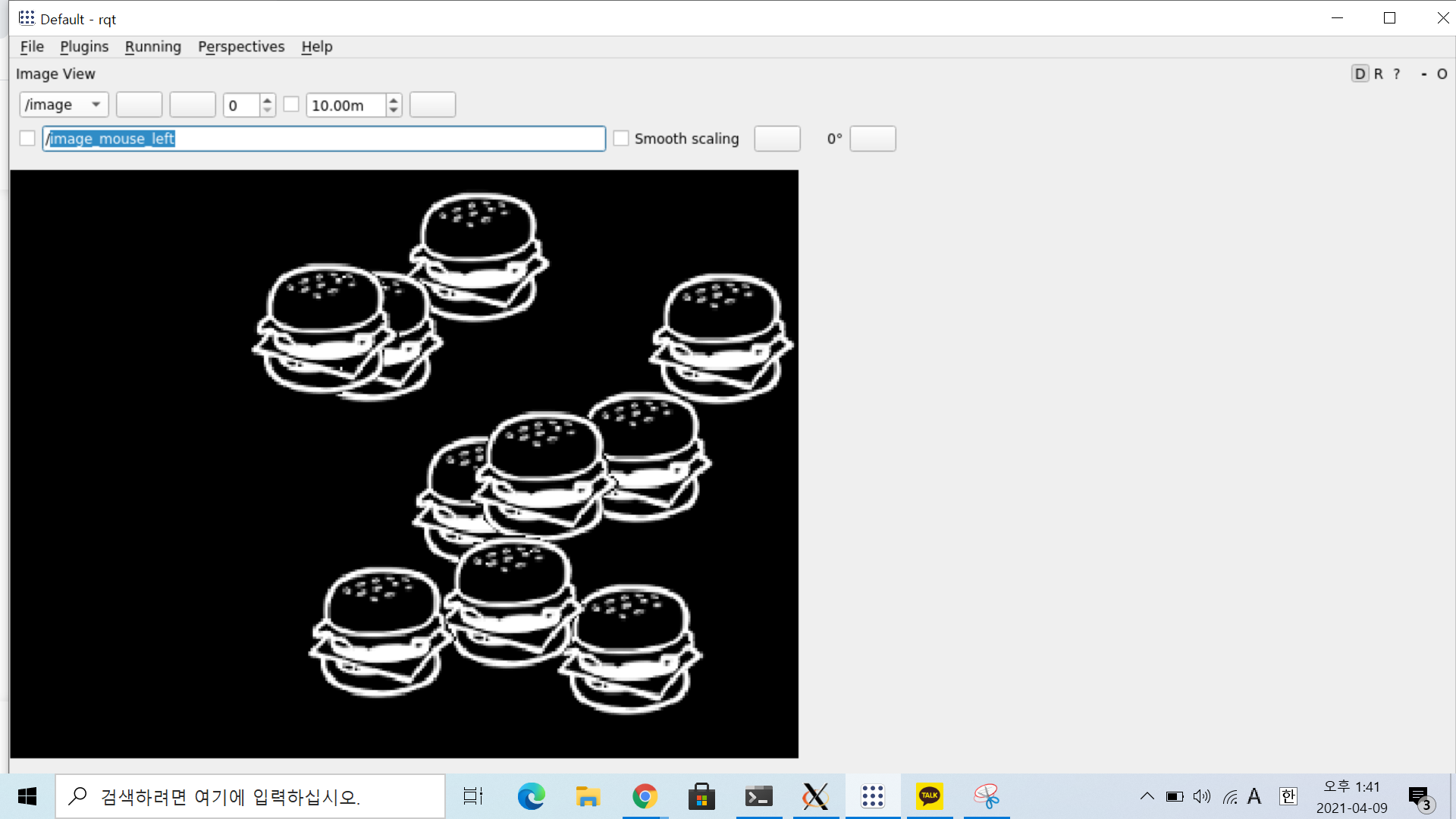
다음과 같이 확인 가능하다.
