ROS_호랑나비
1.007 패키지 설치와 노드 실행 김성욱

https://cafe.naver.com/openrt/24065출처 007 패키지 설치와 노드 실행 (오픈소스 소프트웨어 & 하드웨어: 로봇 기술 공유 카페 (오로카)) | 작성자 표윤석turtlesim 패키지란, 간단한 거북이가 등장해서 ros 기본 개념을
2.015 ROS의 종합 GUI 툴 RQt 김성욱
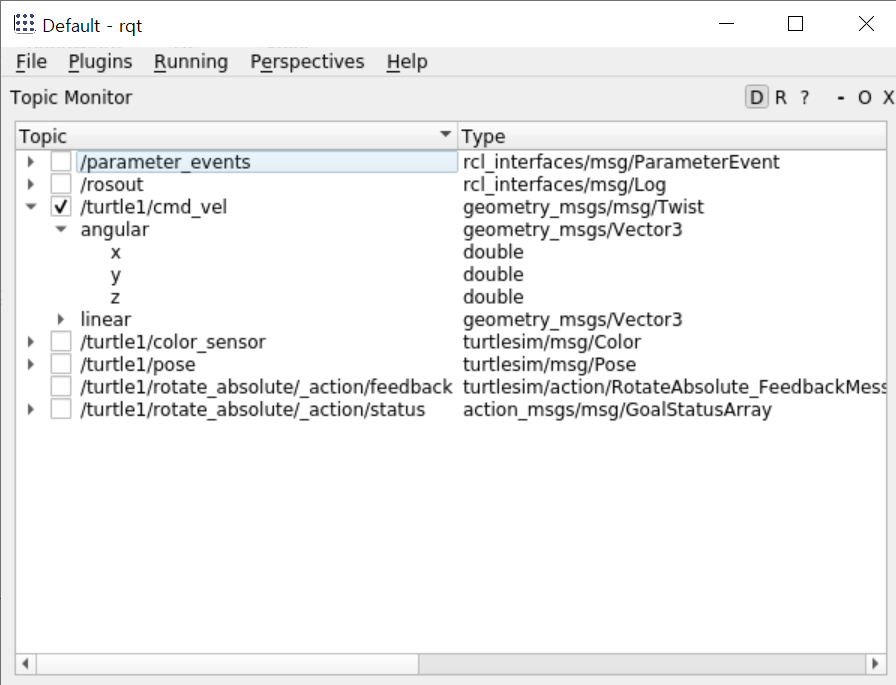
https://cafe.naver.com/openrt/24231 [출처] 015 ROS의 종합 GUI 툴 RQt (오픈소스 소프트웨어 & 하드웨어: 로봇 기술 공유 카페 (오로카)) | 작성자 표윤석 1. RQt 프레임워크 > 프레임워크와 라이브러리의 차이점은 유튜브
3.012 ROS 2 토픽/서비스/액션 정리 및 비교
토픽: 비동기식 단방향 메세지 송신PublisherSubscriber다자간 송신 가능서비스: 동기식 양방향 메세시 송수신Service Client 에서 Request 전송Service Server 에서 Response 회신다자간 송수신 불가액션: 비동기식+동기식 양방향
4.013 ROS 2 파라미터 (parameter)
서비스와 비슷한 성격. 서비스의 요청과 응답과는 달리 노드 내부 또는 외부에서 매개변수 Set, Get이 주 목적.Parameter ServiceParameter Server$ ros2 run turtlesim turtlesim_node $ ros2 run turt
5.008 ROS 2 노드와 데이터 통신
참고 링크 : 오로카 8강노드 : 최소 단위 실행 가능한 프로세스메세지 : 노드와 노드 사이에 입력과 출력으로 서로 주고 받는 데이터(int, float, bool, str)메세지 통신 : 메세지를 주고 받는 방식토픽서비스액션파라미터$ ros2 run 패키지명$ ros
6.009 ROS 2 토픽(topic)
참고 자료 : 오로카 9강토픽 : 비동기식 단방향 메시지 송수신 방식msg 메시지 형태의 메시지를 발간하는 publish와 메시지를 구독하는 subscriber로 구성 1 : N / N : 1 / N : N 통신이 가능Ros에서 널리 쓰이는 통신 방식publish와 s