벡터와 행렬
벡터와 행렬의 개념
- 벡터 : 방향과 크기를 갖는 대상
- 행렬 : 여러 벡터를 열로 담은 구조
- 행렬은 교환법칙이 성립하지 않는다. ()
- 행렬은 분배법칙과 결합법칙이 성립한다.
- (분배법칙), (결합법칙)
- 행렬의 곱셈을 위해선 행렬 A의 열과 행렬 B의 행의 개수가 같아야 한다.
- 텐서 : 3차원 이상의 구조를 갖는 배열
- 설계 행렬 (Design Matrix) : 학습 데이터를 담은 행렬 (n samples * d features)
- 전치 , 역행렬 , 단위 행렬
- 행렬식 : 선형 변환의 부피 스케일링 (부호는 방향성)
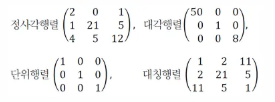
- 특수한 행렬들
역행렬 (Inverse Matrix)
행렬 A와 곱하면 단위 행렬 I가 나오는 행렬 를 역행렬이라고 하며, 이는 정방행렬(행과 열의 수가 같은 행렬)에 대해서만 정의되고, 역행렬이 없으면 특이행렬(Singular Matrix)이라고 한다.
역행렬은 곱했을 때 항등 행렬을 만들어 내는 성질을 지닌다.
A = np.array([[1., 2., 3.,],
[3., 4., 5.],
[7., 8., 10.]])
print("A = \n", A) # 기본 행렬 출력
print("A^T = \n", A.T) # 전치된 행렬 출력
print("det(A) = ", npl.det(A)) # 행렬식 계산
print("A inverse (via scipy) : \n", sl.inv(A)) # 역행렬 계산
# 역행렬은 곱했을 때 항등행렬을 만들어 내는 성질을 지님. (AA^{-1} = A^{-1}A = I)
print("A * A^{-1} = l : \n", A @ sl.inv(A))전치행렬 (Transpose Matrix)
전치행렬이란, 행렬의 행과 열을 교환한 행렬을 의미한다.
행렬식(Determinant)과 행렬식의 기하학
행렬식이란, 행렬 공간을 얼마나 늘이거나 줄이는지, 선형 변환의 부피 스케일링을 의미하는 값이다. 다시 말해, 선형 변환의 부피 변화율을 나타내는 값이다.
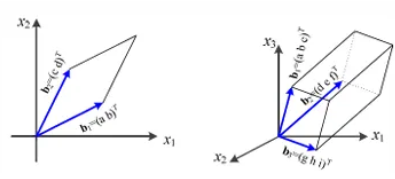
행렬식은 어떤 행렬의 역행렬 존재 여부에 대한 판별값이 되기도 하며, 행렬식의 값이 0이면 역행렬이 존재하지 않는다. 행렬식은 정방 행렬에 대해서만 정의되며, 기하학적으로는 2차원에서는 2개의 행 백터가 이루는 평행사변형의 넓이를, 3차원에서는 3개의 행 벡터가 이루는 평행 사각 기둥의 부피를 의미한다.
예시 코드
(열벡터 ) 일 때, 는 가 만드는 평행사변형의 면적이다.
# 선형 변환 결과 확인하는 코드
# 행렬식 det(A)가 선형 변환의 부피 스케일링 의미하는 거니까
# 결국엔 det(A)만큼 선형변환 적용한 결과를 시각화한 그래프 !
# 그래프 Before, After 보면 각 단위 면적이 3배 커진 걸 확인 가능함.
A2 = np.array([[2., 1.,],
[1., 2.,]])
print("det(A2) =", npl.det(A2)) # A2 행렬식 계산
# 격자와 변환된 격자 시각화
# (11, 11, 2) -> (121, 2)
# np.stack() -> 새로운 차원(축) 추가해 배열 합침
# np.meshgrid() -> 2차원 평면 위에 격자의 좌표망 만듦
grid = np.stack(np.meshgrid(np.linspace(-1, 1, 11), np.linspace(-1, 1, 11)), axis=-1).reshape(-1, 2)
grid_T = grid @ A2.T # 모든 격자점에 선형 변환 적용 (행렬곱)
plt.figure(figsize=(5,5))
plt.scatter(grid[:,0], grid[:,1], s=10) # 원래 점 표시 / s = 점 크기
plt.scatter(grid_T[:,0], grid_T[:,1], s=10, marker='x') # 선형 변환 적용된 점 표시
plt.axis('equal'); plt.title("Before (•) / After (x) by A2") # plt.axis('equal'); x, y축 스케일 맞춤
plt.show()고유값/고유벡터
고유값/고유벡터 : 정의와 직관
정방 행렬 A에 대해 를 만족하는 를 A의 고유 벡터, 를 고유값이라고 한다. 다시 말해, 고유 벡터는 행렬 A를 선형 변환했을 때, 선형 변환 A에 의한 변환 결과가 자기 자신의 상수배가 되는 0이 아닌 벡터를 의미하고, 고유값은 그 상수배 값(고유벡터의 변화되는 스케일 정도)를 의미한다. 이때, A의 고유 벡터는 A에 선형 변환을 취해도 방향이 변하지 않고, 크기만 변한다.
대칭행렬은 이므로 항상 실수 고유값을 지니고, 고유벡터를 만드는 행렬 A가 대칭행렬일 때 서로 다른 고유값을 가지는 고유벡터는 서로 직교한다. (모든 대칭행렬의 고유벡터는 서로 직교(orthogonal)한다)
여기서 직교는 고유벡터의 값이 서로 수직이어서 두 벡터의 내적 결과가 0이 나온다는 것을 의미한다.
- 키워드 : 불변 방향, 크기 스케일링, 대칭행렬, 직교
- 고유값 : .
- 고유벡터 :
예시 코드 - 고유값 분해와 Av = λv 검증
A = np.array([[4., 2.],
[3., 5.]])
vals, vecs = npl.eig(A) # 고유값 분해
print("A = \n", A) # A 행렬 출력
print("eigenvalues =", vals) # A의 고유값
print("eigenvectors (columns) = \n", vecs) # A의 고유벡터
# 검증 Av = λv
for i in range(len(vals)):
v = vecs[:, i] # i번째 고유 벡터
Iv = vals[i] * v # i번째 고유값 * 고유벡터 (λv)
Av = A @ v # Av 계산
# Av - λv = 0이 성립하면 Av = λv인 것.
print(f"i = {i} : ||Av - λv|| = " , npl.norm(Av - Iv))예시 코드 - 2D 변환에서의 시각적 의미
임의의 A가 평면 전체의 방향을 뒤섞어도 고유 벡터의 방향은 그대로 남는다.
A = np.array([[2.,1.],
[0.5,1.5]])
vals, vecs = npl.eig(A) # 고유값 고유벡터 계산
# (289, 2)
grid = np.stack(np.meshgrid(np.linspace(-2,2,17), np.linspace(-2,2,17)), axis=-1).reshape(-1, 2)
grid_T = grid @ A.T # 모든 격자점에 선형 변환 적용 (행렬곱)
plt.figure(figsize=(5,5))
plt.scatter(grid[:,0], grid[:,1], s=8)
plt.scatter(grid_T[:,0], grid_T[:,1], s=8, marker='x')
for i in range(2):
v = vecs[:,i].real # i번째 고유벡터 실수부 (대칭행렬이 아니라 고유벡터가 복소수일 수 있어서)
# 벡터 크기를 1로 정규화
v = v/npl.norm(v) # np.linalg.norm(v) : 벡터 v의 길이 계산
t = np.linspace(-2,2,100)[:,None] # -2 ~ 2까지 100개 점 만들고, (100, 1) 형태로 만듦
line = t*v[None,:] # (100, 1) (1, 2) -> (100, 2) / 고유벡터 방향으로 -2~2배까지 점 찍음
plt.plot(line[:,0], line[:,1])
plt.axis('equal'); plt.title("Eigen-directions are invariant (lines)")
plt.show()고유 벡터의 직교
대칭 행렬의 고유 벡터 집합은 서로 직교하나, 비대칭 행렬에서는 일반적으로 고유벡터가 직교하지 않는다.
- 고유벡터들이 직교하면 가 성립한다.
import numpy as np
import numpy.linalg as npl
# (1) 대칭행렬 : 고유벡터 직교성 확인
S = np.array([[2., -1., 0.],
[-1., 2., -1.],
[0., -1., 2.]])
valsS, vecsS = npl.eigh(S) # 대칭전용 -> 실수 / 직교 보장 (QR) / 다시 말해, npl.eigh(S)는 고유값과 고유벡터가 실수이고 고유벡터들이 직교하도록 보장함
# 고유벡터들이 직교하면 Q^TQ = I가 성립함.
print("Symmetric eigenvectors orthogonality (Q^T Q ≈ I) : \n", vecsS.T @ vecsS)
# (2) 비대칭행렬 : 일반적으로 직교 아님 (Q^T Q ≠ I)
# -> 다르게 표현하면 Off-diagonal 값이 0이 아님 (직교하지 않음)
B = np.array([[1., 2.],
[0., 3.]])
valsB, vecsB = npl.eig(B)
print("Nonsymmetric eigenvectors dot products : \n", vecsB.T @ vecsB)파워 반복(Power Iteration)과 Rayleigh Quotient
Power Iteration이란, 행렬의 가장 큰 고유값과 그에 대응하는 고유벡터를 근사적으로 찾는 알고리즘이다. (행렬을 계속 곱하다 보면 가장 큰 고유값과 고유벡터만 살아남는다는 것)
고유값이 크다 = 정보량이 많다(해당 방향이 데이터의 분산이 크다)는 의미이며, PCA에서는 고유값이 큰 고유벡터만 남기고 지우는 방식으로 차원 축소한다. 따라서 고유값이 큰 순서대로 몇 개의 고유벡터만 남기고 작은 건 버려야 하는데, 고유값이 큰 걸 찾을 수 있는 알고리즘 중 하나가 Power Iteration이다.
Rayleigh Quotient이란, 벡터 x를 A로 변환했을 때 방향/크기의 비율을 측정하는 것이다. 따라서 x가 고유벡터라면, Rayleigh Quotient를 통해 고유값을 계산할 수 있다.
def power_iteration(A, num_iter=30):
x = rng.normal(size=(A.shape[0], )) # 행렬 A 크기에 맞춰 초기 벡터 난수 생성
x = x / npl.norm(x) # 정규화
history = [] # Rayleigh quotient 기록하는 리스트
# 행렬(A)을 계속 곱하다 보면 가장 큰 고유값과 고유벡터만 살아남는다 -> power_iteration
# Av = λv이므로 계속 곱하면 그 벡터의 방향은 변하지 않고 크기만 고유값만큼 커지므로
# 계속 곱하면 가장 큰 고유값을 가진 방향으로 수렴함.
for _ in range(num_iter):
x = A @ x # Ax
x = x / npl.norm(x)
r = (x @ (A @ x)) / (x @ x) # Rayleigh quotient 계산
history.append(r)
return x, np.array(history) # 가장 큰 고유값에 대응하는 고유벡터로 추정된 벡터 return
A = np.array([[4., 2., 0.],
[2., 3., 1.],
[0., 1., 2.]])
x_star, rq_hist = power_iteration(A, num_iter=25) # Power Iteration 실행
vals, vecs = npl.eigh(A) # 고유값, 고유벡터 구하기
idx = np.argmax(vals) # 가장 큰 고유값 인덱스 추출
print("Power-iter dominant eigenvalue (approx) = ", rq_hist[-1]) # 마지막 반복에서의 Rayleigh Quotient (행렬 A의 가장 큰 고유값)
print("True dominant eigenvalue = ", vals[idx])
plt.figure()
plt.plot(rq_hist)
plt.xlabel("iteration"); plt.ylabel("Rayleigh quotient")
plt.title("Convergence of Rayleigh quotient to dominant λ")
plt.show()고유값 분해 (Eigen-Decomposition)
고유값 분해 (Eigen-Decomposition)란, 행렬을 고유값과 고유벡터를 통해 분해하는 기법으로, 어떤 정방행렬 A를 의 형태로 쪼개는 것을 의미한다. 이때, Q는 A의 고유벡터를 열에 배치한 행렬, Λ는 고유값을 대각선에 배치한 대각행렬을 의미한다.
이렇게 고유값 분해를 수행하면 행렬을 그 행렬만의 좌표계(고유 벡터)로 바꾸어 단순 대각 형태로 만들어 주며, 이는 PCA에서 주로 활용된다. 고유값이 크다는 것은 그 방향에 데이의 정보량이 많다는 의미이기에 정보량이 큰 데이터만 남기고 차원을 축소할 수 있기 때문이다.
- 대각화 가능하다 = 행렬 A를 고유벡터와 고유값으로 분해할 수 있다
- 다시 말해, 고유값 분해가 가능하고, 의 형태로 표현이 가능하다는 것을 의미함.
고유값 분해를 해주면, 대각행렬 Λ가 단순 스케일 행렬임을 볼 수 있다. (이는 표준 기저에서 봤을 땐 복잡한 변환이었는데, 좌표계를 고유벡터 기준으로 바꿨더니 A가 단순히 각 좌표 성분을 배 해주는 행렬로 보이더라! 라는 느낌으로 이해하면 된다.)
Q의 열벡터들을 고유벡터로 구성한 이유는 결국엔 이 벡터들이 만드는 좌표계가 고유기저이기 때문이고, 결국 고유값 분해는 이 고유 기저를 기준으로 행렬을 분해하는 것을 의미한다고 볼 수 있다.
# 일반 행렬의 고유값 분해
A = np.array([[4.,2.],
[3.,5.]])
vals, vecs = npl.eig(A) # 고유값과 고유벡터 계산
V = vecs
L = np.diag(vals) # 대각행렬 만드는 함수
A_rec = V @ L @ npl.inv(V) # A = VΛV^{-1}
print("||A - VΛV^{-1}||", npl.norm(A - A_rec)) # A와 고유값 분해된 값 비교
# 대칭 행렬의 고유값 분해
# 대칭 (스펙트럴 정리(Spectral Theorem) - 대칭행렬은 항상 직교대각화 가능하다는 것) 확인
S = np.array([[2.,-1.],
[-1.,3.]])
valsS, QS = npl.eigh(S) # 대칭전용 -> 실수 / 직교 보장 (QR)
# 직교행렬이면 역행렬이 전치행렬
# QQ^{T} = Q^{T}Q = I이고, QQ^{-1} = I이므로 Q^{-1} = Q^T
S_rec = QS @ np.diag(valsS) @ QS.T # A = QΛQ^{-1} = QΛQ^{T}
print("||S - QΛQ^T|| =", npl.norm(S - S_rec)) # S와 고유값 분해된 값 비교PCA : 공분산의 고유 분해
PCA의 절차 (Code Example)
- 데이터의 평균을 0으로 정규화
- 공분산행렬 계산 - 공분산행렬은 대칭행렬이기에 항상 고유값 분해가 가능하다. 또한, 공분산은 데이터의 분산 구조를 담는 행렬이기에 공분산 행렬의 고유 벡터는 데이터의 분산이 최대/최소인 방향을 나타낸다. 이를 주성분 벡터라 부를 수 있고, 고유값은 그 방향에서의 분산 크기(정보량)를 의미한다.
- 고유값 분해
- 주성분 선택
- 차원 축소 및 원래 데이터 X를 선택된 주성분 벡터 W에 투영 (Z=XW)
from sklearn.datasets import load_digits
digits = load_digits()
X = digits.data.astype(float)
X = X - X.mean(axis = 0, keepdims=True) # 정규화
n = X.shape[0] # 데이터 샘플 개수
C = (X.T @ X) / n # 공분산행렬
vals, vecs = npl.eigh(C) # 대칭전용 -> 실수 / 직교 보장 (QR)
idx = np.argsort(vals)[::-1] # 고유값 내림차순 정렬 후, 가장 큰 고유값이 첫 번째가 되도록 순서 바꿈
vals, vecs = vals[idx], vecs[:, idx] # 고유벡터도 같은 순서 정렬
explained = vals / vals.sum() # 고유값이 전체 분산에서 차지하는 비율
print("Top-10 explained variance ratio : \n", explained[:10])
def pca_project(X, vecs, k):
W = vecs[:, :k] # 앞에서부터 k개 주성분 벡터 선택 (64*k)
Z = X @ W # Z = XW (원래 데이터 X를 선택된 주성분 벡터 W에 투영)
return Z, W
def pca_reconstruct(Z, W):
return Z @ W.T # ZW^T (축소된 데이터 Z를 원래 차원으로 복원)
# k = 주성분 개수
for k in [5, 10, 20, 40]:
Z, W = pca_project(X, vecs, k)
# digits.data.mean(axis=0, keepdims=True) - 원래 X에서 평균을 뺐었으므로 다시 더해줘서 복원
Xk = pca_reconstruct(Z, W) + digits.data.mean(axis=0, keepdims=True)
fig = plt.figure(figsize=(6, 2))
for i in range(8):
ax = plt.subplot(1, 8, i+1)
ax.imshow(Xk[i].reshape(8,8), interpolation="nearest")
ax.set_xticks([]); ax.set_yticks([])
plt.suptitle(f"PCA reconstruction with k = {k}")
plt.tight_layout()
plt.show()특이값 분해 (Singular Value Decomposition)
고유값 분해는 정방 행렬만 분해 가능하다. 따라서 정방 행렬이 아닌 경우(비정방행렬)에 대해서도 분해를 수행하기 위해선 특이값 분해를 활용해야 한다. 이는 임의의 행렬을 의 형태로 행렬을 쪼개는 것을 의미한다.
이때, 고유값은 행렬 A가 직사각행렬이면 입출력 차원이 달라 상수배(고유값)을 직접 정의할 수 없다. 따라서 길이(스케일 크기)만 추출하기 위해 , 의 결과가 항상 정방 행렬이고 대칭행렬인 점을 활용한다.
- (왼쪽 특이행렬) : 의 고유 벡터를 열에 배치한 n*n 행렬
- (특이값 리스트) : 의 고유값의 제곱근을 대각선에 배치한 대각 행렬 (n*m 행렬)
- (특이행렬) : 의 고유 벡터를 열에 배치한 m*m 행렬
실제 차원 축소(PCA)의 구현에는 비정방행렬에도 적용이 가능한 보다 일반적인 방법인 SVD가 주로 사용된다.
# SVD로 얻은 주성분 벡터랑 공분산 고유분해로 얻은 주성분 벡터가 같은지 검증하는 코드
# PCA의 목표는 데이터가 가장 많이 퍼져있는 방향을 찾는 거
# 공분산 이용하는 이유 -> 데이터의 분산 구조를 담는 행렬이기 때문
# 따라서 공분산 행렬의 고유벡터 = 데이터 분산이 최대/최소인 방향
# = 주성분 벡터
# 고유값 = 그 방향에서의 분산 크기
# SVD로 얻은 V와 공분산 고유벡터 비교
from sklearn.datasets import load_digits
digits = load_digits()
Xraw = digits.data.astype(float)
Xc = Xraw - Xraw.mean(axis=0, keepdims=True)
# 행렬 Xc에 대해 SVD 분해
# U : 왼쪽 특이행렬 / S : 특이값 리스트 / VT : 오른쪽 특이행렬
U, S, VT = npl.svd(Xc, full_matrices=False)
V = VT.T
C = (Xc.T @ Xc) / Xc.shape[0] # 공분산
valsC, vecsC = npl.eigh(C) # 고유값, 고유벡터
idx = np.argsort(valsC)[::-1] # 가장 큰 고유값
vecsC = vecsC[:, idx] # 가장 큰 고유값에 대응하는 고유벡터
# 주성분 부호/순서 불확정성을 감안해 상관을 비교
# V = SVD에서 나온 오른쪽 특이벡터들 -> 공분산 행렬의 고유벡터와 같아야 함.
# C = 공분산행렬을 직접 고유분해해서 얻은 고유벡터
# V, C는 둘 다 직교행렬이므로 두 직교행렬을 곱하면 직교 행렬이 되며,
# 두 값이 완전히 같으면 곱한 값이 단위행렬이 됨.
# 따라서 SVD의 V와 공분산 고유벡터가 같은지 확인
# SVD 결과 = PCA임을 증명 가능함. (오른쪽 특이벡터랑 공분산 행렬이 같아야 PCA 결과 = SVD 결과가 성립)
corr = np.abs(np.diag(V.T @ vecsC))
print("Diagonal of |V^T * eigenvector(C)| (shold be near 1) : \n", corr[:10])