저번 포스팅에서는 Linear model에 대해 다루었다.
마지막에 Nonlinear transformation에 대해 보았는데, 이번 챕터에서도 계속 보겠다.
Nonlinear transformation (continued)
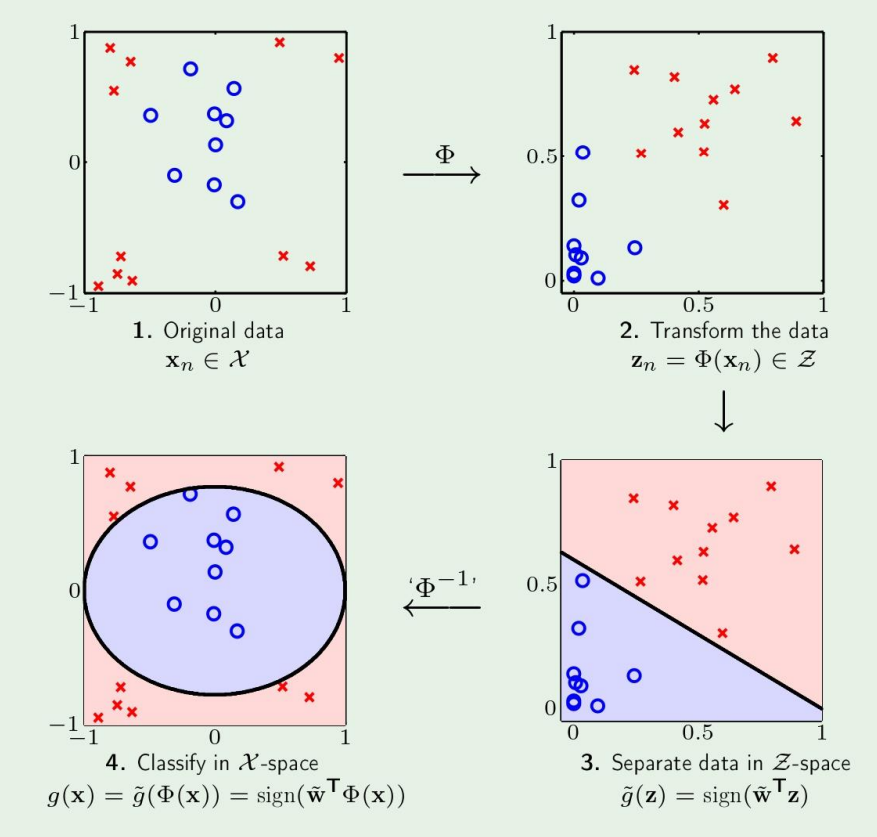
여기서처럼 Inverse mapping을 하면 왜 다시 원래의 boundary로 돌아올까?
선형대수의 Similarity Transformation과 비슷하다.
여기서 결국 data에 대해 mapping을 하는것이고, 에 대해 하는것이 아니기 때문에 원래 공간으로 hypothesis를 옮겨오면 원래 공간에서 boundary를 나타내게 된다.
식으로 이걸 간단히 확인해보자
이렇게 label은 바뀌지 않고, 에 대한 식이므로 원래의 결과로 돌아올 수 있다.
Error measure
지금껏 우리가 찾은 hypothesis와 target function사이의 관계를 모두
로 표기하였다. 이는 당연하게도, 정확한 target을 찾을수없고, 따라서 자연스럽게 error가 생긴다. ML의 목적이 hypothesis를 찾는것도 있지만, 이 error을 줄이는 목표를 잊으면 안된다!
이제 이 error는 와 에 대한 함수이므로
로 표기하고, 로 바꾸는게 가능하다.
ex)
- square error :
- Binary error :
From pointwise to overall
그렇다면 이제 와 는 다음처럼 나타낼 수 있다.
In-sample error:
Out-of-sample error:
How to choose the error measure
교재에 있는 예제를 그대로 살펴보겠다.
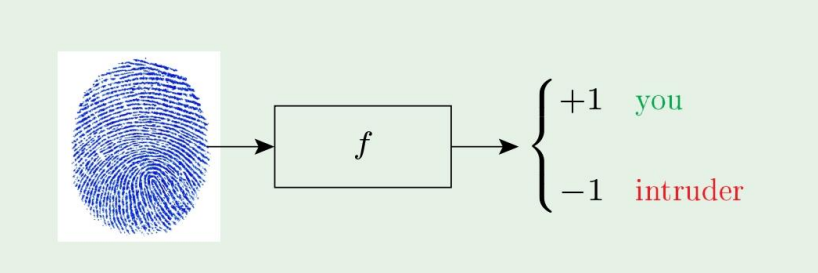
한 지문 인식기를 만들었다고 하자.
그랬을때 confusion matrix는 다음처럼 나타날 것이다.
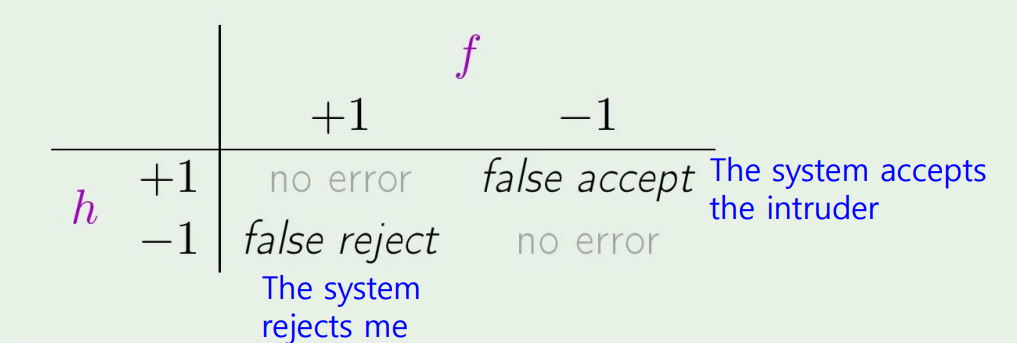
이제 이 지문인식기를 슈퍼마켓과 CIA 두 경우에서 쓰이는 경우를 생각해보자.
슈퍼마켓에서는 피해가 그렇게 크지 않아 error measure를 다음처럼 설정한다 하면,
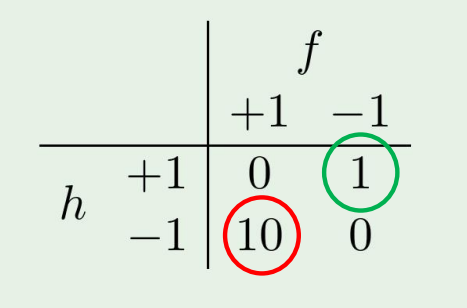
만약 CIA의 경우에는 false accept의 경우에 아주 큰 피해를 가져오므로
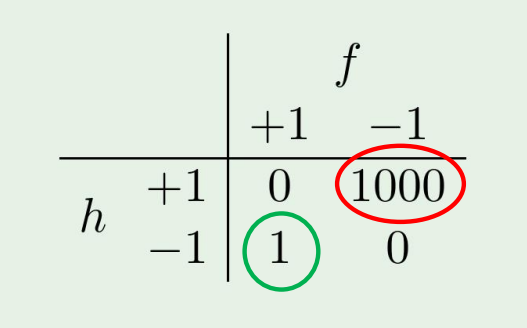
이렇게 크게 설정할수있다.
The error measure should be specified by the user
Noisy target
The target function is not always a function
target function은 우리가 수학적으로 생각하는 그런 함수가 아닐수있다!
따라서...
Target 'distribution'
대신에, 우리는 target distribution 를 사용하자.
는 이제 joint distribution 로 표현되고,
Noisy target = deterministic target + noise
Deterministic target is a special case of noisy target
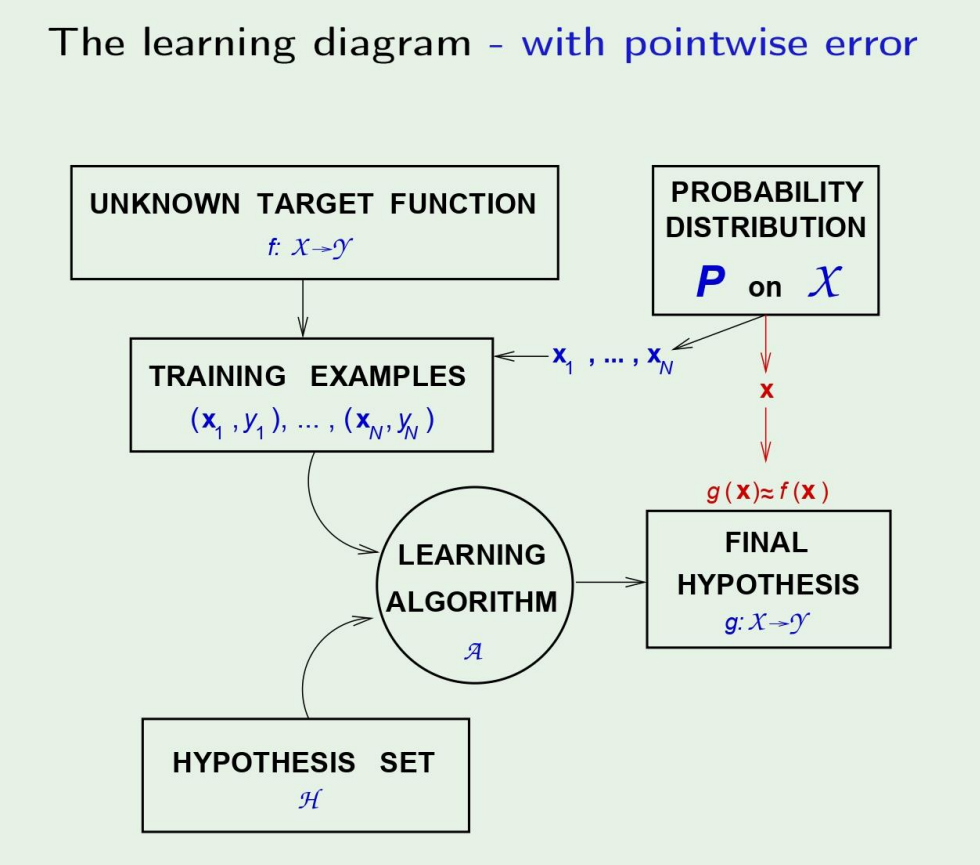
이제 좀더 Learning 이라는것에 집중해보자.
우리가 호패딩형님에 의해서 Learning is feasible하다는 것을 알았다.
이것은 learning이 아니다.
우리가 learning을 하려는 것은, 을 찾는것이다.
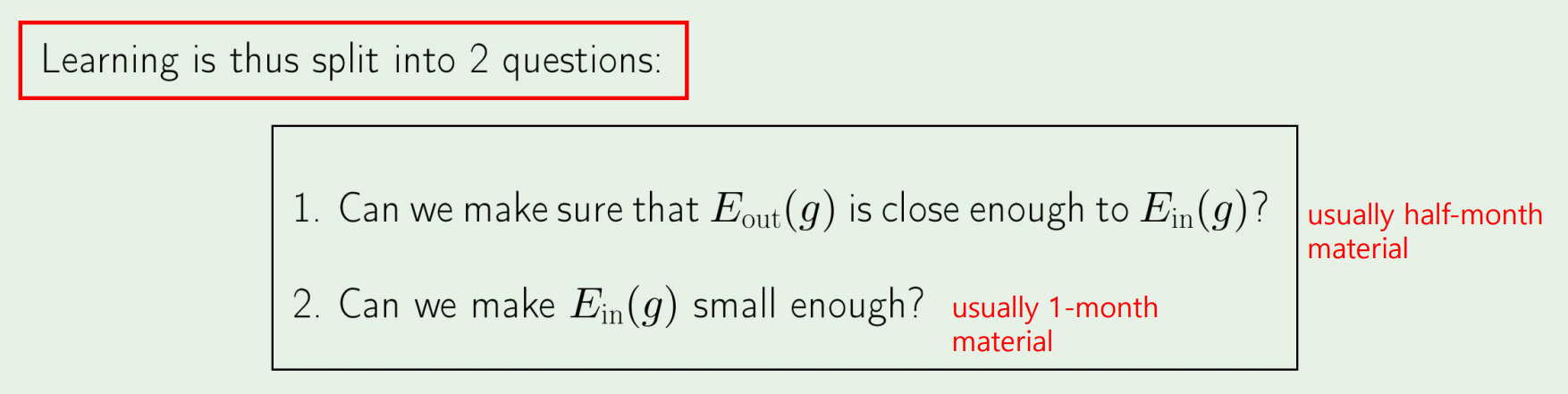
Learning이란, 위 그림의 2가지 문제를 푸는것이다.
더 깊게 learning에 집중하기 전에 다음의 tradeoff 문제를 살펴보자.
결국 우리는 model complexity를 결정하며 문제를 어떻게 풀어야 할지 정해야하는데,
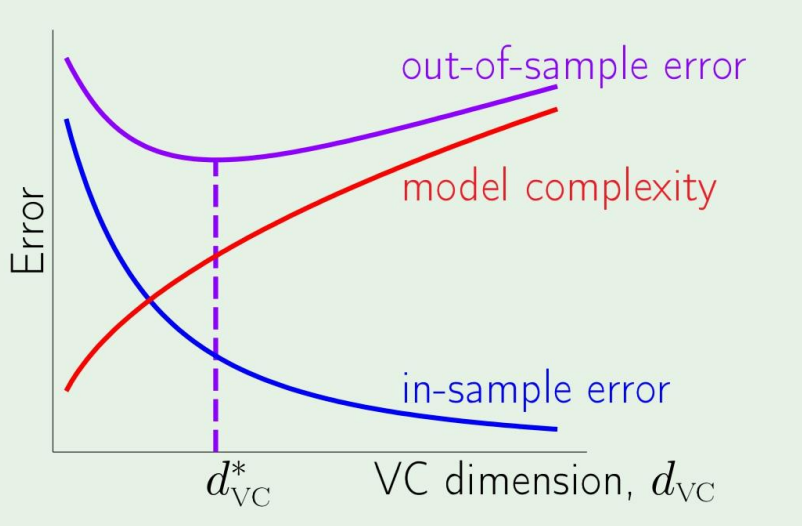
그림에서 볼수있듯이
Model complexity가 올라가면 는 낮아지지만, 은 커지게 된다.
근데 이 complexity를 어느정도 정할수있는데, 이는 다음 포스팅에서 살펴보겠다.
