Euler Angle
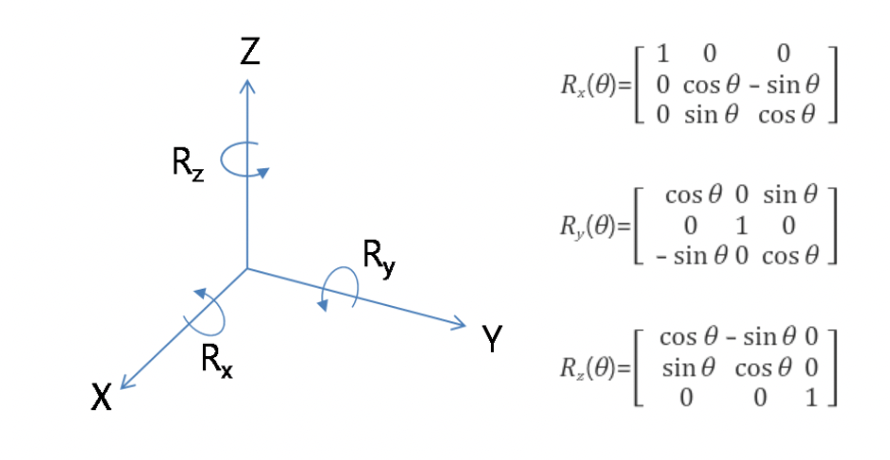
Rotation matrix(3D)
- 3D에서의 회전은 각 축을 기준으로 만큼 회전할 때의 회전행렬로 나타낼 수 있다.
- 축에서의 회전 각을 각각 라고 할 때 3D 회전은 회전변환을 조합하여 다음과 같이 표현할 수 있다.
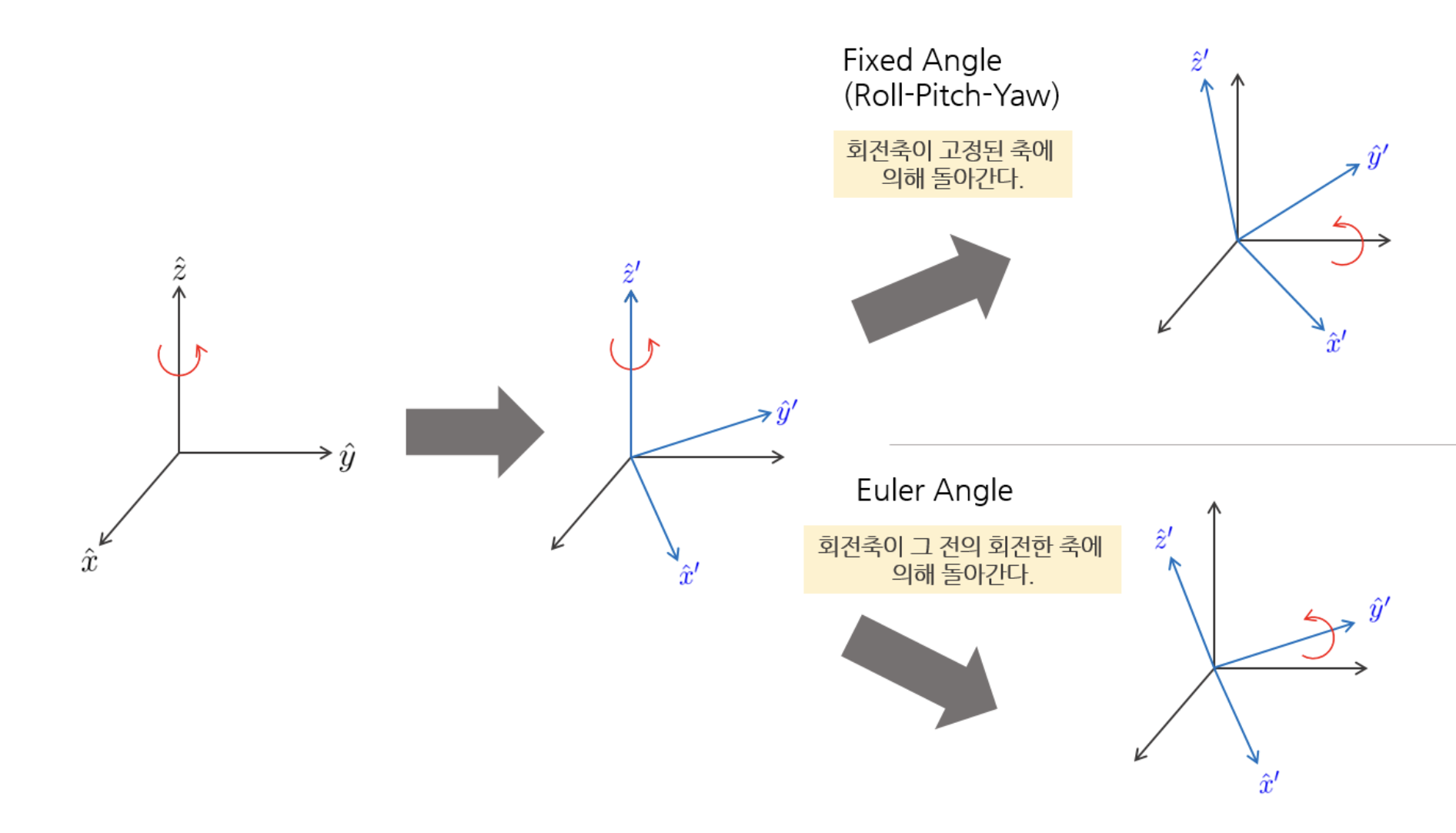
Euler Angle vs Fixed Angle
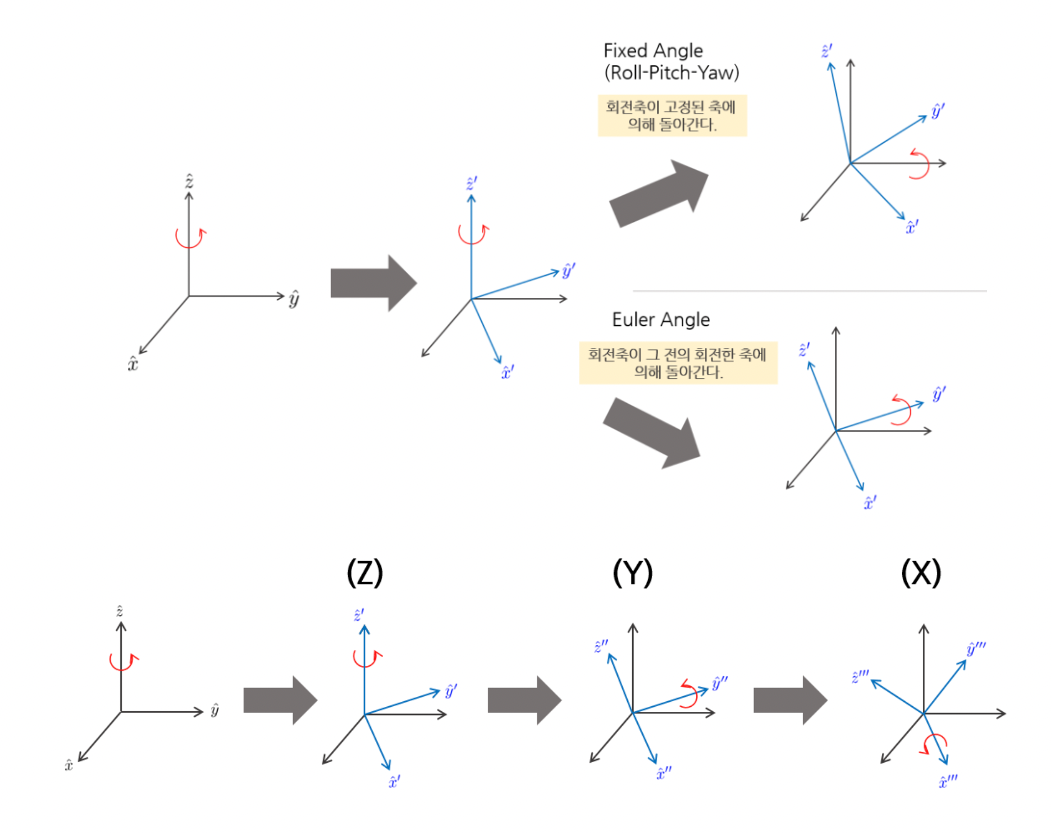
- 오일러 각도란 회전한 축을 기준으로 다음 회전을 하는 것을 의미한다.
- 축에서의 오일러 각을 각각 라고 할 때 축으로 만큼 회전한 후, 회전한 축 의 축을 기준으로 만큼 회전한다. 이후, 새로운 회전축 의 축을 기준으로 만큼 회전한다.
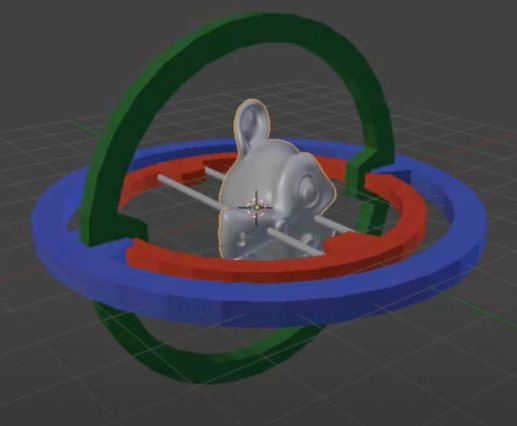
Gimbal lock
https://homoefficio.github.io/2015/07/17/Gimbal-Lock/
- 오일러 각도로 물체를 표현할 때 같은 방향으로 두 회전 축이 겹치는 현상으로 3개의 자유도 중 1개의 자유도를 잃어버리게 된다.
- 축을 90도 회전시켰을 때 gimbal lock이 발생하여 가 제한된다.
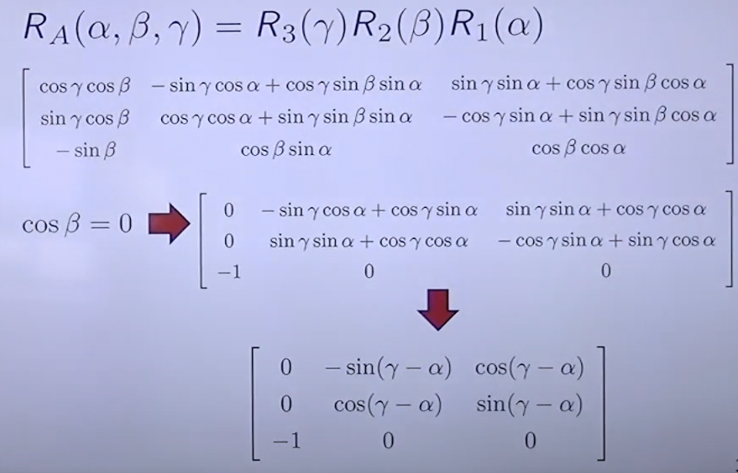
- 일 때 이 되어 와 를 구할 수 없는 singular matrix를 가지게 된다.
Discontinuity
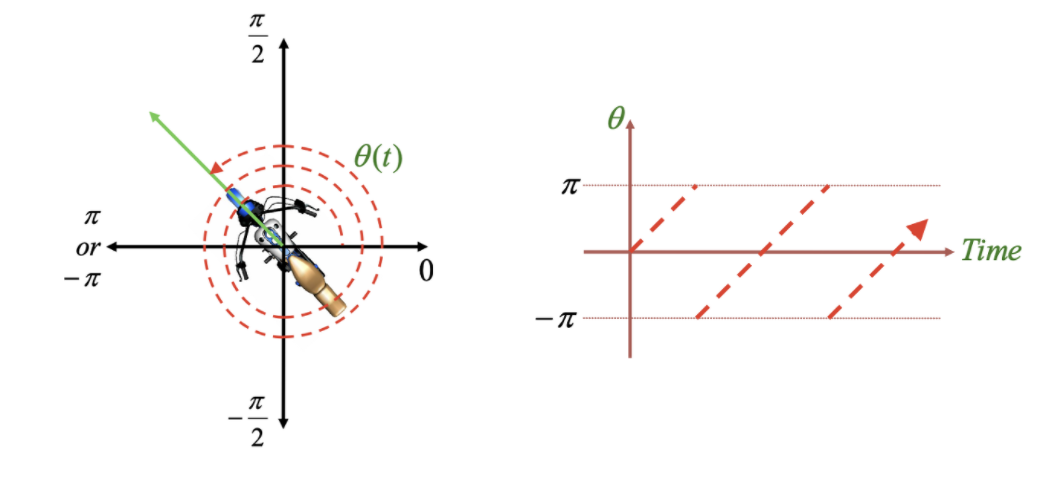
- many-to-one correspondences라고도 부르며 모션은 연속적이지만 이를 표현하는 방식이 비연속적인 것을 의미한다.
- 각도가 ~로 제한되어 있어 나타나는 현상으로 30도와 390가 똑같이 표현된다.
Materials
- Euler angle
https://www.youtube.com/watch?v=YXGUGSAv09A&t=2173s - Gimbal lock
https://www.youtube.com/watch?v=zc8b2Jo7mno&t=40s
