Introduction
- 변화가 있는 3D map을 매번 최신 정보로 업데이트하는 것은 많은 비용이 들기 때문에 이러한 변화에도 robust한 localization을 하는 모델이 필수적이다.
- 따라서, 본 논문에서는 regional color distribution을 이용하여 빠르고 변화에 robust한 알고리즘을 제안한다.
Method
- Point cloud 가 주어져있을 때 query panorama image의 camera pose(rotation, translation)을 추정하고자 한다.
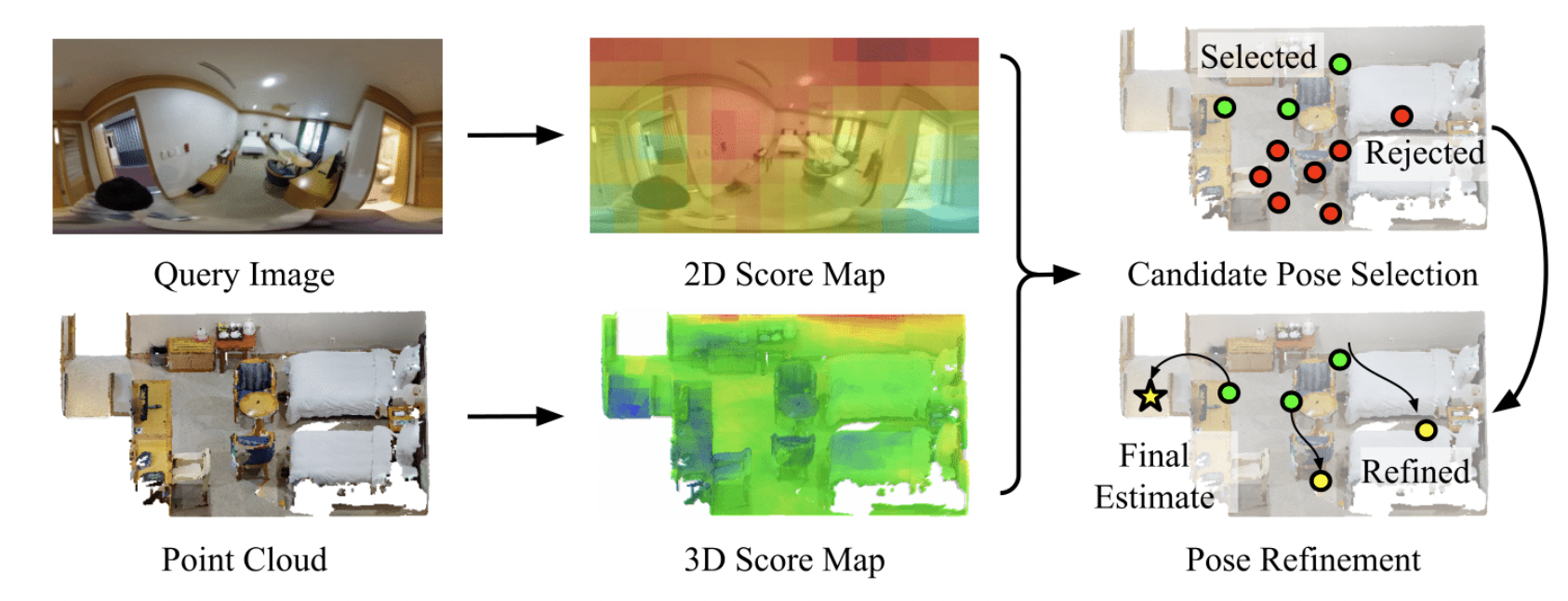
- 전체적인 흐름은 다음과 같다.
- Point cloud의 다양한 pose에서의 color histogram과 query image의 color histogram을 비교한다.
- 두 histogram의 consistency value를 2D score map 과 3D score map 로 기록한다.
- Score map을 통해 선택한 Candidate poses를 refine한 후 최적의 pose를 찾는다.
Fast Histogram Generation
- Illumination의 변화나 camera white balance에 의한 color distribution 차이를 보정하기 위해 color histogram matching을 활용해 전처리 해준다.
- 전처리 후에 query image와 point cloud의 synthetic projection의 동일한 patch에 대한 color histogram을 만들어 비교한다.
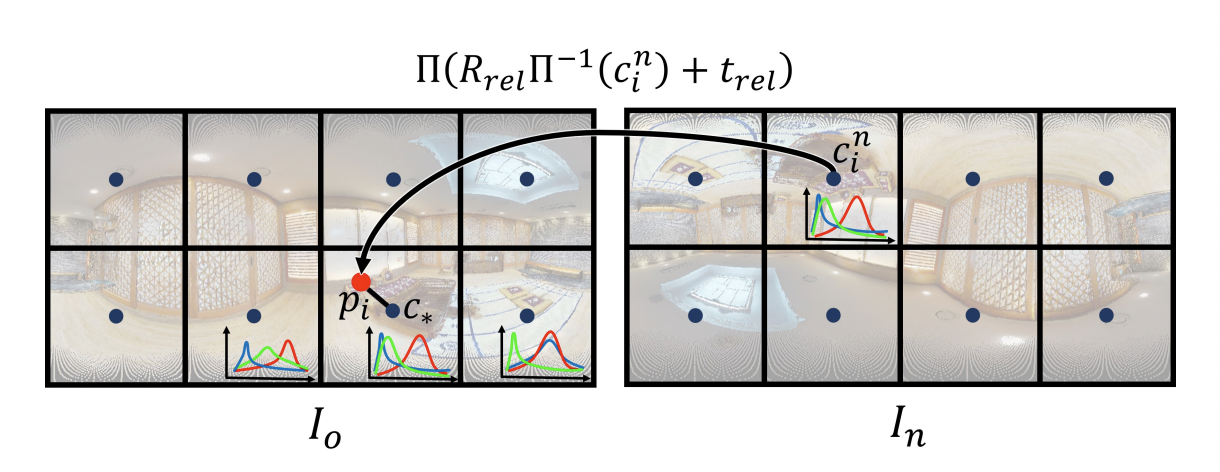
- Synthetic projection은 camera pose에 따라 아주 다양하게 만들 수 있기 때문에 다른 view에서의 pre-computed histogram을 재사용하여 연산량을 줄인다.
- 새로운 view 의 patch centroid 을 original view 에 projection한 가 와 가장 가까우므로 patch 의 histogram으로 추정할 수 있다.

- 은 relative pose, 은 2D coordinate을 3D coordinate으로 mapping하는 inverse projection을 의미한다.
- 가 의 image patches를, 가 patch centroids를 의미하고 에 대해서도 동일하다 할 때 의 color histogram은 와 가장 가까운 의 patch centroid의 color histogram으로 할당된다.
Score Map Generation
- Query image와 synthetic view의 patch color histogram을 비교하여 2D score map과 3D score map을 만들고 aggregation 한다.
- Query imaged와 synthetic view의 patch를 각각 로 정의하고 patch 에서의 color histogram은 각 채널에 대해서 개의 bins로 나타낸다.
2D Score Map
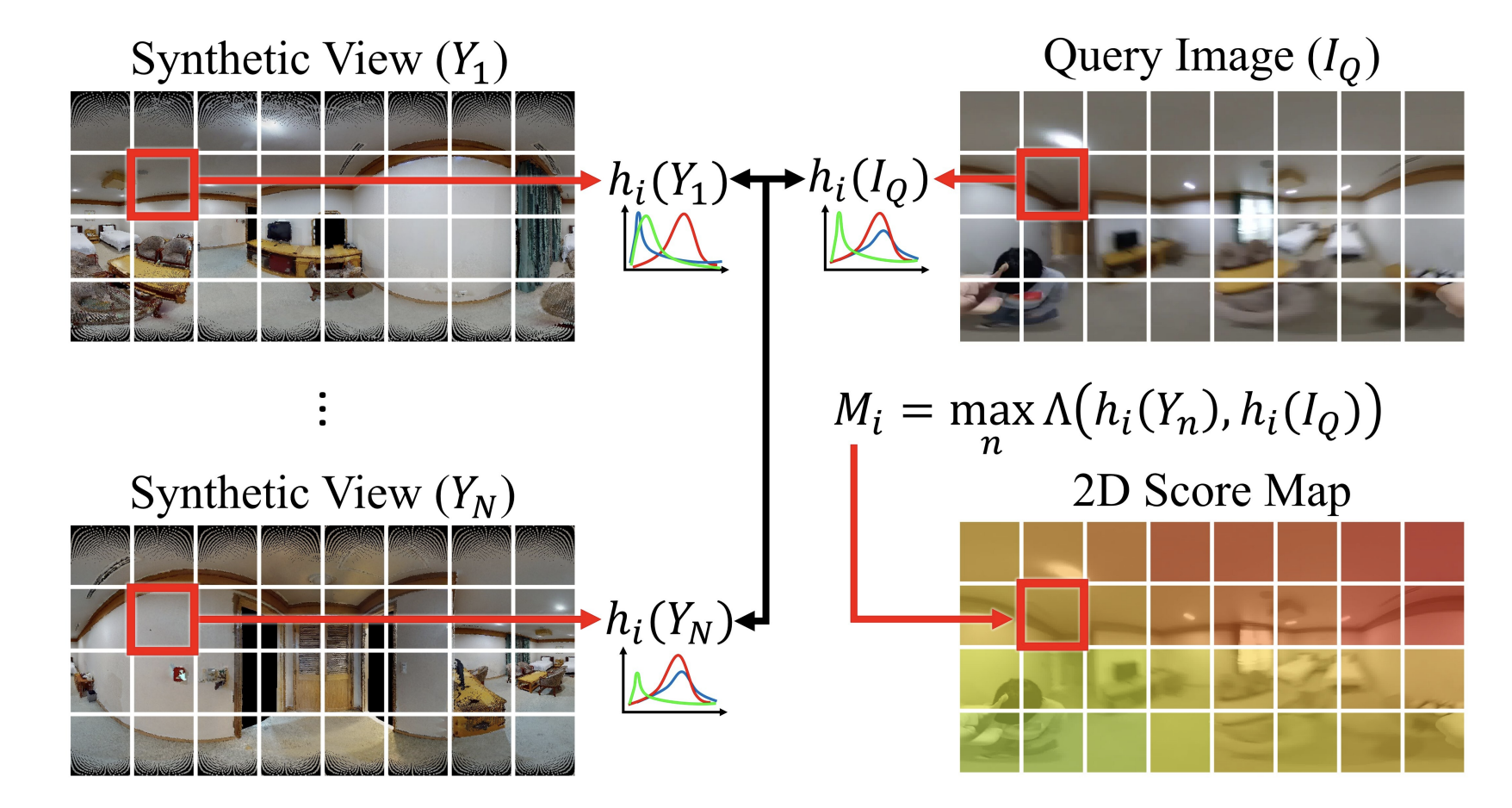
- 2D score map 는 동일 위치의 patch에 대한 maximum histogram intersection으로 계산한다.
- 에서 patch들의 score 은 다음과 같이 표현할 수 있다.

- Scene change가 있는 경우 2D score는 모든 synthetic view에 대해 낮은 점수를 가지게 될 것이기 때문에 3D score map을 함께 활용한다.
3D Score Map
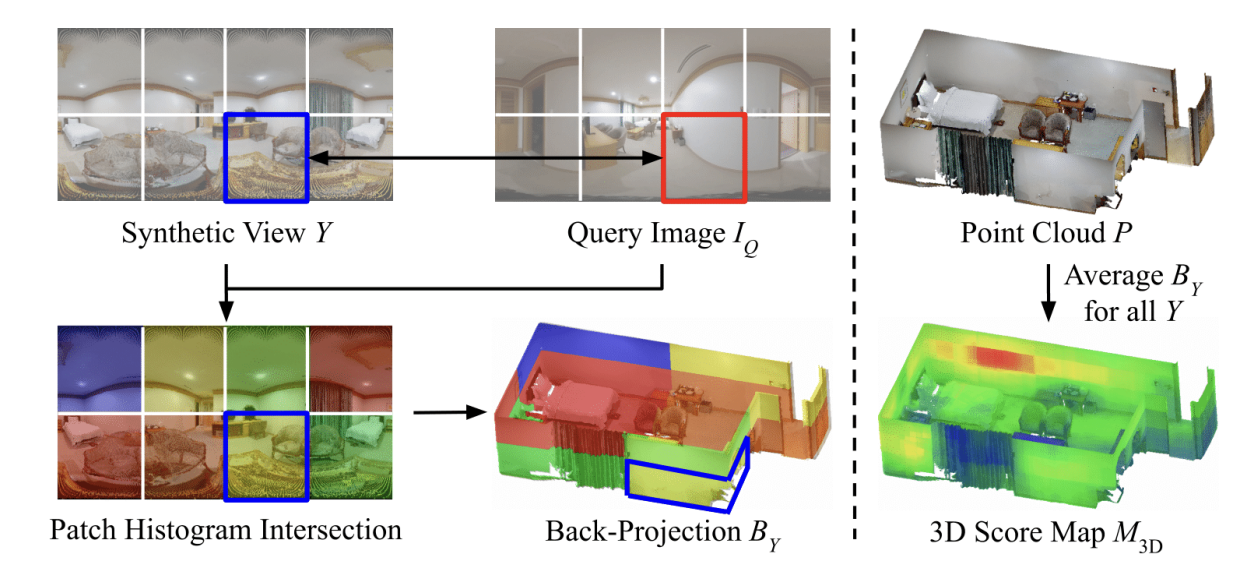
- 3D score map은 각 point의 color를 비교하여 측정하며 이를 back-projection하여 point cloud location으로 보낸다.
- 주어진 synthetic view 에 대해 은 와 사이의 patch-based intersection score를 의미하며 point들의 평균 값이 3D score map이 된다.

- Scene change가 있는 경우 해당 영역의 3D score가 작을 것이기 때문에 작은 가중치를 주어 sampling loss를 계산한다.
Candidate Pose Selection
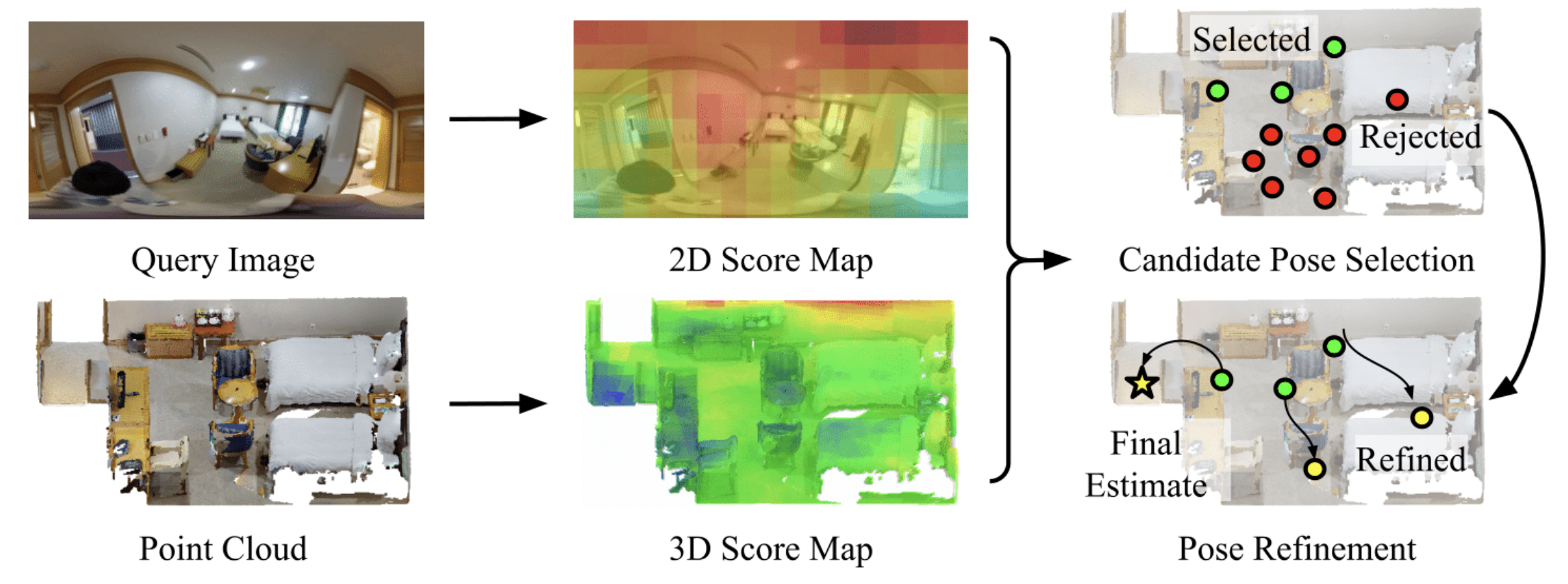
- Pose를 optimize 하기 전에 initial pose를 color distribution을 통해 효율적으로 선택하는 과정이 필요하며 다음과 같이 진행된다.
- 개의 3D location을 골라 개의 synthetic view를 rendering 한다.
- 개의 pose 중 histogram intersection이 가장 큰 개의 candidate pose를 찾는다. Rotation은 uniform하게 sampling하며 rendering한 single view로부터 patch-wise histogram을 얻는다.
- poses에 대해 histogram intersection이 작은 patch는 scene change가 있을 확률이 높으므로 작은 가중치를 주어 계산하며 query image 와 synthetic view 의 유사도는 weighted score의 합으로 표현된다.

Pose Refinement

- 개의 pose에 대해 weighted sampling loss를 적용하여 optimize 한다.
- 는 point cloud를 2D에 mapping하는 함수, 는 2D coordinate를 로부터 sampling한 pixel value에 mapping하는 함수를 의미한다.
- Scene change가 있는 것 같은 points에 대해서는 작은 가중치를 주도록 3D map score 를 element wise product 해준다.
Experiments
-
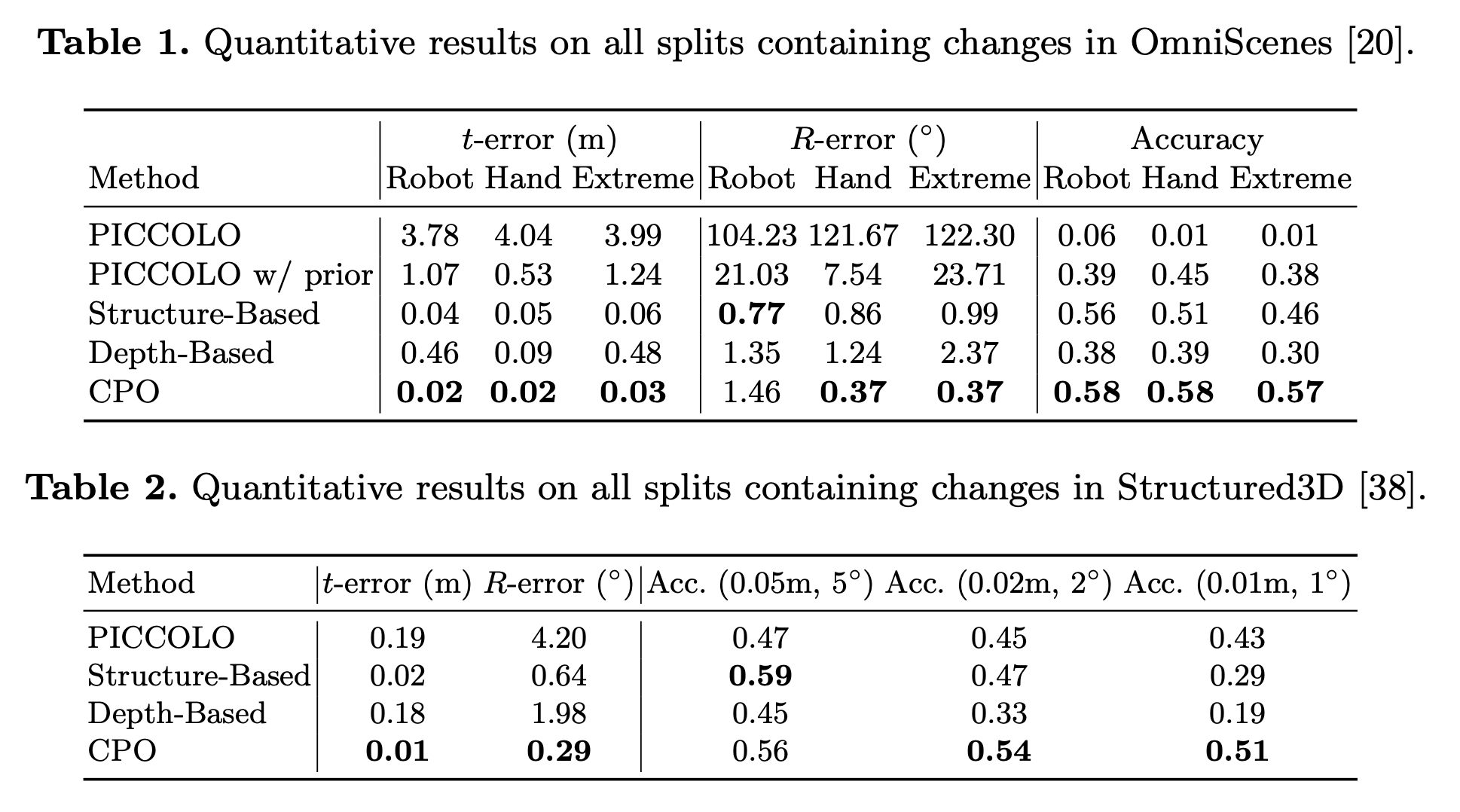
Scene과 lighting에 변화가 있는 OmniScenes와 Structured3D에 대해 좋은 성능을 보이고 있다.
-
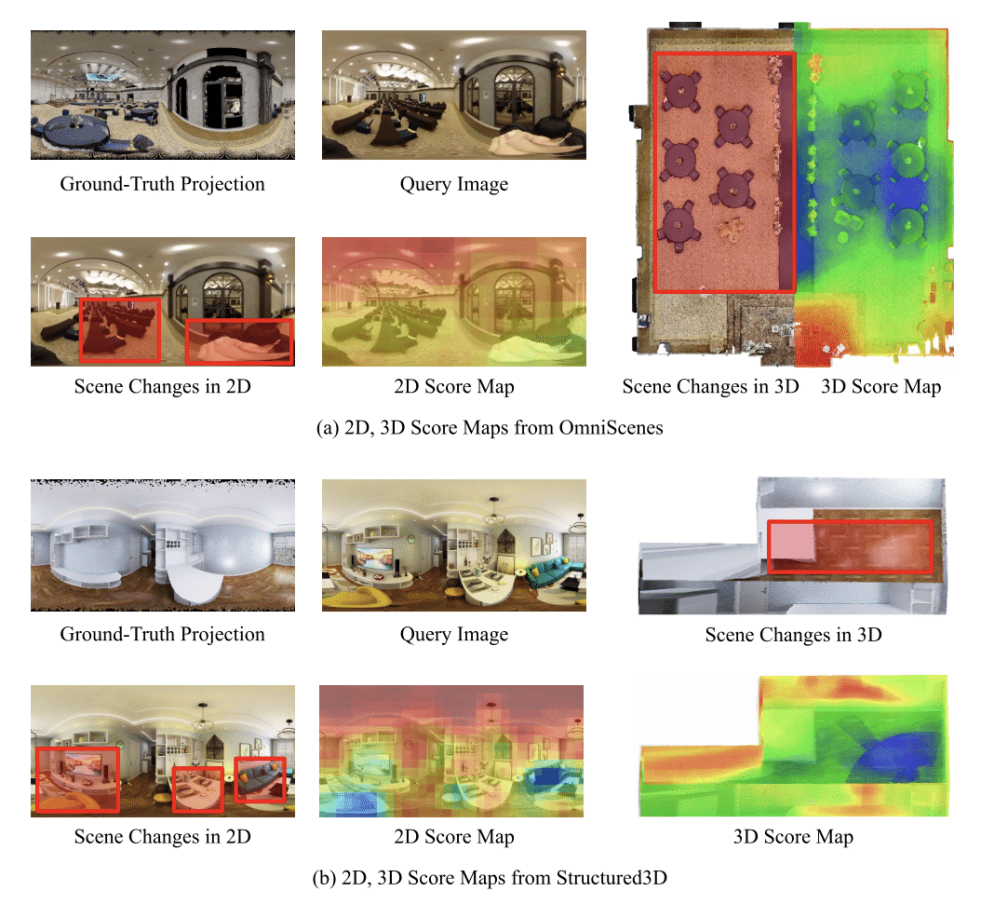
2D, 3D score map을 visualize 한 결과 scene change가 존재하는 영역의 score가 낮게 나타나는 것을 확인할 수 있다.
-
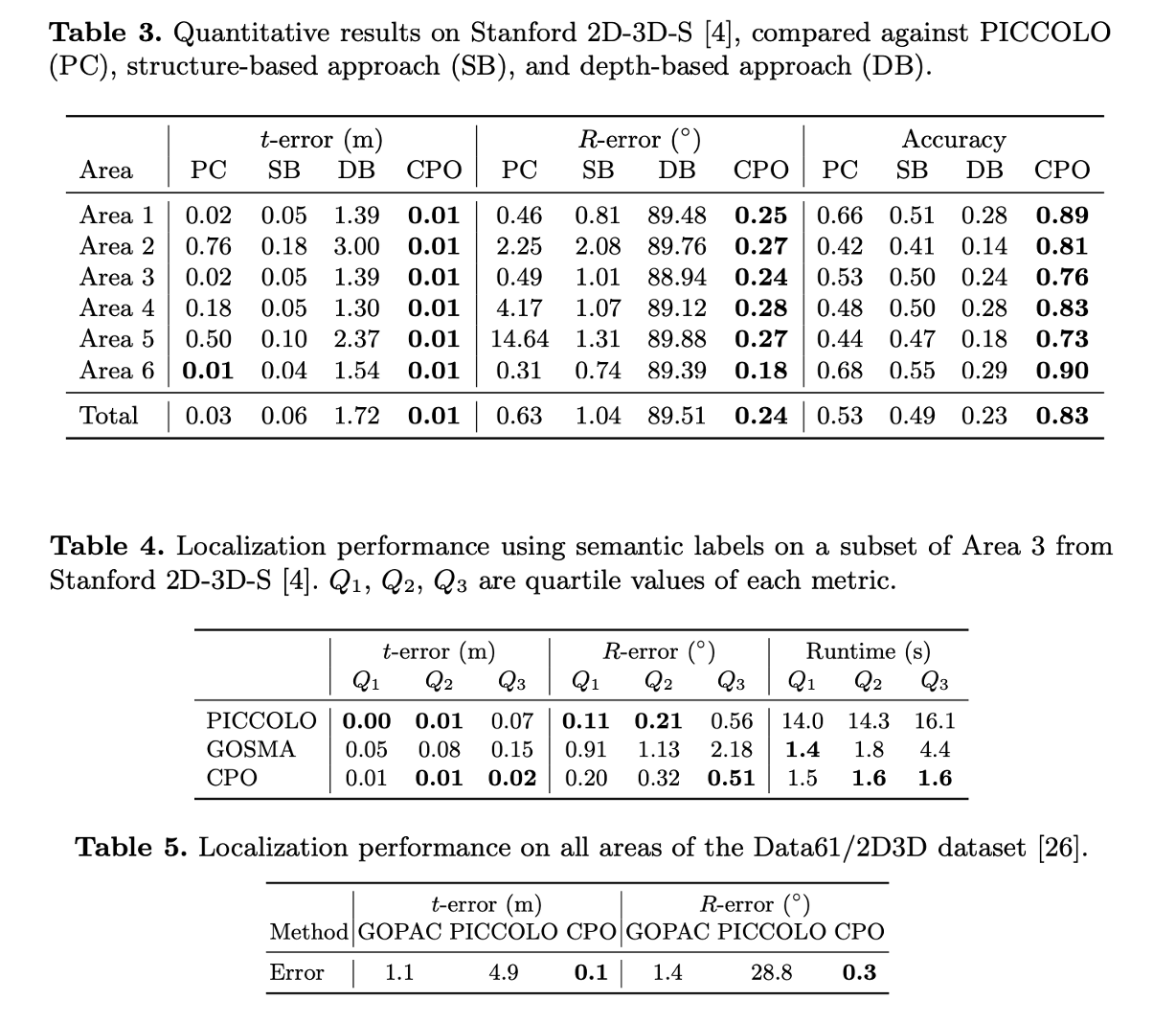
Scene change가 없는 경우에도 SOTA를 찍었으며 semantic input에 대해서도 성능이 좋다.
