배경
노드는 ROS 그래프 내에서 통신하는 실행 가능한 프로세스다. 노드는 토픽을 통해 여러 정보를 문자열의 형태로 다른 노드한테 전달한다.
토픽을 통해 데이터를 주고받는 퍼블리셔와 서브스크라이버 역할을 수행하는 간단한 talker와 listener를 만들어 보자.
작업
1. 패키지 생성하기
이전에 생성한 dev_ws를 계속 사용하자.
cd ./src/
ros2 pkg create --build-type ament_cmake cpp_pubsubdev_ws/src/cpp_pubsub/src로 이동해 보자. 해당 디렉터리에는 CMake 패키지가 속한 디렉터리이다.
2. 퍼블리셔 노드 작성하기
talker예제 코드를 다음 명령어를 통해 받아 오자.
wget -O publisher_member_function.cpp https://raw.githubusercontent.com/ros2/examples/foxy/rclcpp/topics/minimal_publisher/member_function.cpp이후 사용하는 에디터로 해당 cpp파일을 열자.
// Copyright 2016 Open Source Robotics Foundation, Inc.
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
#include <chrono>
#include <memory>
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using namespace std::chrono_literals;
/* This example creates a subclass of Node and uses std::bind() to register a
* member function as a callback from the timer. */
class MinimalPublisher : public rclcpp::Node {
public:
MinimalPublisher() : Node("minimal_publisher"), count_(0) {
publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);
timer_ = this->create_wall_timer(
500ms, std::bind(&MinimalPublisher::timer_callback, this));
}
private:
void timer_callback() {
auto message = std_msgs::msg::String();
message.data = "Hello, world! " + std::to_string(count_++);
RCLCPP_INFO(this->get_logger(), "Publishing: '%s'", message.data.c_str());
publisher_->publish(message);
}
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
size_t count_;
};
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MinimalPublisher>());
rclcpp::shutdown();
return 0;
VSCode기준#include "rclcpp/rclcpp.hpp"에서 오류가 나오는 경우C/C++확장의C/C++ Configurations에 있는경로 포함에 다음을 추가한다./opt/ros/foxy/**정확한 명령어는 플랫폼과 설치 위치에 따라 달라질 수 있다.
2.1 코드 분석
#include <chrono>
#include <memory>
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using namespace std::chrono_literals;코드의 상단에는 C++표준의 헤더 파일이 삽입되어 있고, 이후 rclcpp/rclcpp.h 헤더 파일이 삽입되어 있다.
해당 파일은 ROS 2의 가장 일반적인 기능을 사용할 수 있게 해준다.
마지막 헤더 파일 std_msgs/msg/string.hpp 데이터를 송신하기 위해 필요한 기본적인 메시지 타입을 포함하고 있다.
해당 라인 들은 노드의 의존성을 보여 주는 부분이기도 하다. 의존성은 package.xml이나 CMakeLists.txt를 통해 추가할 수 있다.
class MinimalPublisher : public rclcpp::Node다음은 rclcpp::Node를 상속 받는 노드의 클래스를 정의하는 코드이다.
클래스 내 this는 해당 노드를 의미한다.
public:
MinimalPublisher() : Node("minimal_publisher"), count_(0) {
publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);
timer_ = this->create_wall_timer(
500ms, std::bind(&MinimalPublisher::timer_callback, this));
}클래스의 생성자에서는 count_변수를 0으로 초기화하고, 퍼블리셔 또한 String타입의 메시지와 이름이 topic인 토픽, 백업 이벤트 시 메시지를 제한하는 데 필요한 큐의 사이즈와 더불어 초기화된다. 그다음에는 timer_callback을 1초에 2번씩 호출하는 _timer가 초기화된다.
private:
void timer_callback() {
auto message = std_msgs::msg::String();
message.data = "Hello, world! " + std::to_string(count_++);
RCLCPP_INFO(this->get_logger(), "Publishing: '%s'", message.data.c_str());
publisher_->publish(message);
}timer_callback 함수는 메시지를 설정하고 메시지를 퍼블리싱 하는 함수이다. 매크로 함수 RCLCPP_INFO는 퍼블리시된 모든 메시지를 콘솔에 출력해준다.
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
size_t count_;마지막 부분은 멤버 변수들을 정의한다.
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MinimalPublisher>());
rclcpp::shutdown();
return 0;
}이번엔 노드를 실제로 실행시키는 곳인 메인 함수를 보자.
rclcpp::init함수는 ROS 2를 초기화하며, rclcpp::spin함수는 타이머의 콜백을 포함한 노드의 데이터를 처리한다.
2.2 의존성 추가
cd ..dev_ws/src/cpp_pubsub로 돌아와 package.xml파일을 열자.
ament_cmake 빌드 툴 의존성 다음 라인에 다음을 추가하자.
<depend>rclcpp</depend>
<depend>std_msgs</depend>2.3 CMakeLists.txt
find_package(ament_cmake REQUIRED) 다음 줄에 다음을 추가하자.
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)ros2 run 명령을 위한 실행 파일과 해당 이름 또한 추가하자.
ros2 run 명령이 실행 파일을 찾을 수 있도록 다음을 추가하자.
install(TARGETS
talker
DESTINATION lib/${PROJECT_NAME})전체 코드는 다음과 같다.
cmake_minimum_required(VERSION 3.5)
project(cpp_pubsub)
# Default to C99
if(NOT CMAKE_C_STANDARD)
set(CMAKE_C_STANDARD 99)
endif()
# Default to C++14
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 14)
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
add_executable(talker src/publisher_member_function.cpp)
ament_target_dependencies(talker rclcpp std_msgs)
install(TARGETS
talker
DESTINATION lib/${PROJECT_NAME})
# uncomment the following section in order to fill in
# further dependencies manually.
# find_package(<dependency> REQUIRED)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# uncomment the line when a copyright and license is not present in all source files
#set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# uncomment the line when this package is not in a git repo
#set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()이제 cpp_pubsub 패키지를 빌드 하고, 로컬 설정 파일을 소싱 한 후 실행할 수 있게 된다.
하지만 아직은 서브스크라이버 노드를 작성하지 않았기에 서브스크라이버 노드를 마저 작성하고 실행하자.
colcon build --packages-select cpp_pubsubcd ~/dev_ws/
. install/local_setup.bash
ros2 run cpp_pubsub talker3. 서브스크라이버 노드 작성하기
dev_ws/src/cpp_pubsub로 이동하자.
똑같이 예제 코드를 받아오자.
wget -O subscriber_member_function.cpp https://raw.githubusercontent.com/ros2/examples/foxy/rclcpp/topics/minimal_subscriber/member_function.cppls로 출력해 보면 다음과 같을 것이다.
publisher_member_function.cpp subscriber_member_function.cpp// Copyright 2016 Open Source Robotics Foundation, Inc.
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
#include <memory>
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using std::placeholders::_1;
class MinimalSubscriber : public rclcpp::Node {
public:
MinimalSubscriber() : Node("minimal_subscriber") {
subscription_ = this->create_subscription<std_msgs::msg::String>(
"topic", 10, std::bind(&MinimalSubscriber::topic_callback, this, _1));
}
private:
void topic_callback(const std_msgs::msg::String::SharedPtr msg) const {
RCLCPP_INFO(this->get_logger(), "I heard: '%s'", msg->data.c_str());
}
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_;
};
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MinimalSubscriber>());
rclcpp::shutdown();
return 0;
}3.1 코드 분석
MinimalSubscriber() : Node("minimal_subscriber") {
subscription_ = this->create_subscription<std_msgs::msg::String>(
"topic", 10, std::bind(&MinimalSubscriber::topic_callback, this, _1));
}서브스크라이버 코드는 퍼블리셔와 거의 비슷하다. 서브스크라이버 노드의 이름은 minimal_subscriber이고, create_subsctiption함수를 이용해 초기화한다. 서브스크라이버는 topic을 통해 단순히 데이터를 수신하기 때문에 별도의 타이머는 없다.
void topic_callback(const std_msgs::msg::String::SharedPtr msg) const {
RCLCPP_INFO(this->get_logger(), "I heard: '%s'", msg->data.c_str());
}topic_callback함수는 topic을 통한 데이터를 받고, 매크로 함수 RCLCPP_INFO로 콘솔에 출력해 준다.
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MinimalSubscriber>());
rclcpp::shutdown();
return 0;
}메인 함수에서는 MinimalSubscriber을 제외한 나머지는 동일하다. 의존성은 퍼블리셔와 동일하기 때문에 package.xml을 건들 필요는 없다.
3.2 CMakeList.txt
CMakeLists.txt를 다시 열고 다음을 추가하자.
add_executable(listener src/subscriber_member_function.cpp)
ament_target_dependencies(listener rclcpp std_msgs)
install(TARGETS
talker
listener
DESTINATION lib/${PROJECT_NAME})4. 빌드 및 실행
워크스페이스의 루트(dev_ws)로 이동한 후 빠진 의존성이 있는지 확인해 보자.
rosdep install -i --from-path src --rosdistro foxy -y이후 패키지를 빌드 하자.
colcon build --packages-select cpp_pubsub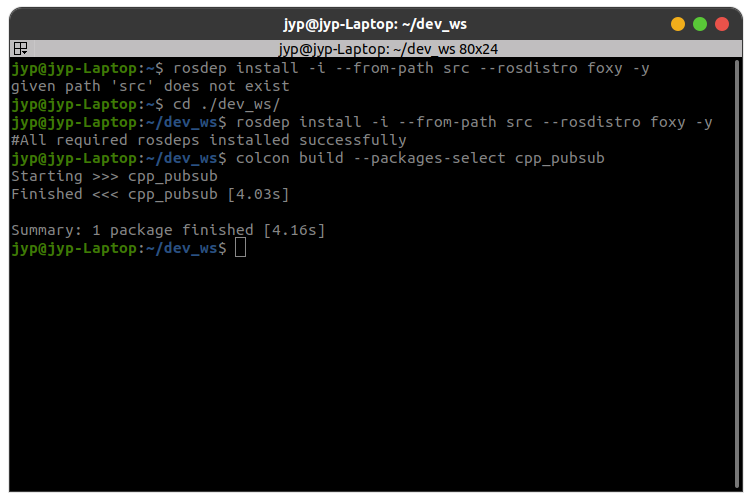
새 터미널을 열고 dev_ws에서 설정 파일을 소싱 하자.
. install/setup.bash이제 실행하면 된다.
ros2 run cpp_pubsub talker또 다른 새 터미널을 열고 이제는 listener를 실행하기 위해 똑같이 반복해 주자.
. install/setup.bash
ros2 run cpp_pubsub listener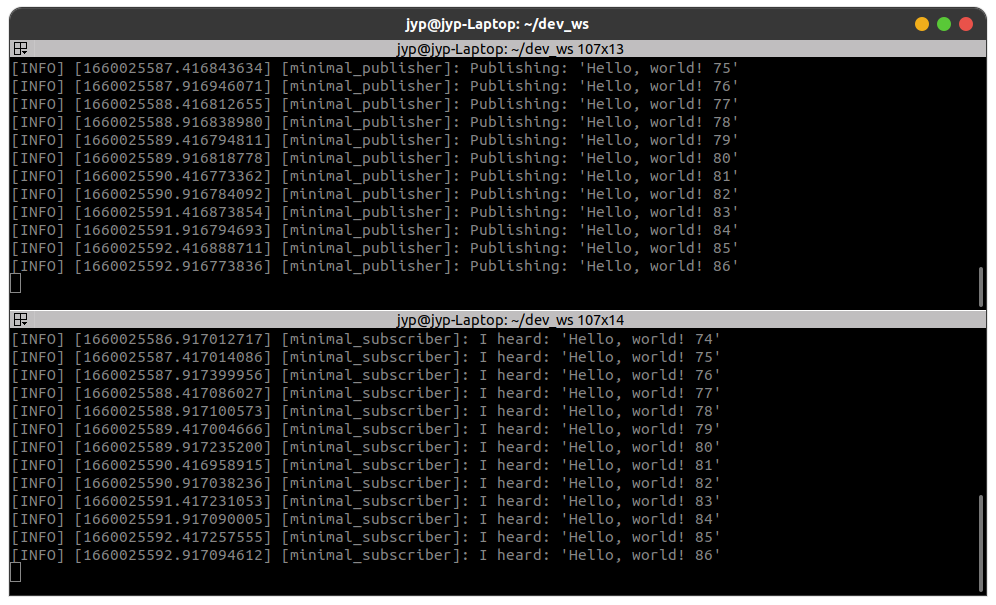
참고