RVIZ에서 8자 주행 코드를 작성해 보자
이렇게.
파일 구성
- 패키지 :
rviz_xycar - 런치 파일 :
rviz_drive.launch - 소스 파일 :
converter.py,rviz_8_drive.py
converter.py
converter.py의 역할
-
실제
자이카의 모터가 받는토픽과,RVIZ의 모터가 받는토픽의 구조가 다르다.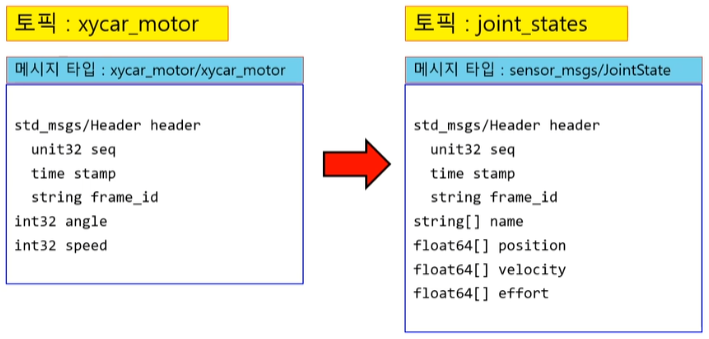
- 토픽간 형 변환 이라고 생각하면 될 듯 하다.
-
코드 본문
#!/usr/bin/env python
import rospy, rospkg
import math
from xycar_motor.msg import xycar_motor
# JointState, Header 메시지 타입 import
from sensor_msgs.msg import JointState
from std_msgs.msg import Header
global pub
global msg_joint_states
global l_wheel, r_wheel
def callback(data):
global msg_joint_states, l_wheel, r_wheel
Angle = data.angle
# xycar motor의 angle은 -50~50 범위
# 이를 -20도~20도로 변환
steering = math.radians(Angle * 0.4)
if l_wheel > 3.14:
l_wheel = -3.14
r_wheel = -3.14
else:
l_wheel += 0.01
r_wheel += 0.01
# msg_joint_states.position 각 자리에 맞는 값 적용
msg_joint_states.position = [steering, steering, r_wheel, l_wheel, r_wheel, l_wheel]
pub.publish(msg_joint_states)
rospy.init_node("converter")
pub = rospy.Publisher("joint_states", JointState)
# callback 함수에서 채울 msg_joint_states.position 제외하고 나머지 값 채우기
msg_joint_states = JointState()
msg_joint_states.header = Header()
msg_joint_states.name = ['front_right_hinge_joint', 'front_left_hinge_joint', 'front_right_wheel_joint', 'front_left_wheel_joint', 'rear_right_wheel_joint', 'rear_left_wheel_joint']
msg_joint_states.velocity = []
msg_joint_states.effort = []
l_wheel = -3.14
r_wheel = -3.14
# callback(data):
rospy.Subscriber("xycar_motor", xycar_motor, callback)
rospy.spin()rviz_8_drive.py
#!/usr/bin/env python
import rospy
import time
from xycar_motor.msg import xycar_motor # 모터 제어를 위한 토픽 메시지 타입 import
motor_control = xycar_motor()
rospy.init_node("driver") # 노드 초기화
pub = rospy.Publisher("xycar_motor", xycar_motor, queue_size=1) # xycar_motor 토픽
# motor_control 토픽의 구조대로, angle과 speed 값을 받아 토픽을 발행
def motor_pub(angle, speed):
global pub
global motor_control
motor_control.angle = angle
motor_control.speed = speed
pub.publish(motor_control)
speed = 3
while not rospy.is_shutdown():
# 1. 4초간 좌회전
angle = -50 # -50이 최대
for i in range(40):
motor_pub(angle, speed)
time.sleep(0.1)
# 2. 3초간 직진
angle = 0
for i in range(30):
motor_pub(angle, speed)
time.sleep(0.1)
# 3. 4초간 우회전
angle = 50 # 50이 최대
for i in range(40):
motor_pub(angle, speed)
time.sleep(0.1)
# 4. 3초간 직진
angle = 0
for i in range(30):
motor_pub(angle, speed)
time.sleep(0.1)실행
# 파일 실행 권한 설정
chmode +x rviz_8_drive.py
chmode +x converter.py
# 빌드
cm
# 실행
roslaunch rviz_xycar rviz_drive.launch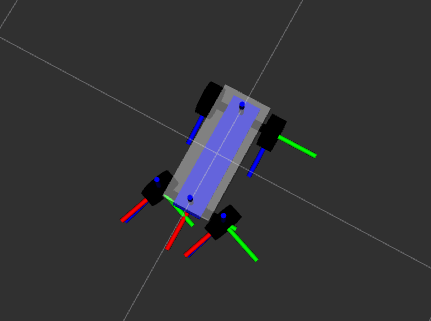
잘 돌아 간다.
올해로 26세