오도미터? 오도메트리?
- Odometer : 차량이나 로봇이 주행하며 이동한 거리를 측정하는 기기
- Odometry : 오도미터 등의 기기의 측정 값으로 움직이는 사물의 위치를 측정하는 방법
- 예시 : 반지름이 5cm인 바퀴가 3바퀴 굴렀으니, 10πcm만큼 이동했겠구나!
자동차 핸들과 앞 바퀴
- 회전 시, 안쪽 바퀴와 바깥쪽 바퀴가 회전하는 정도가 다르다.
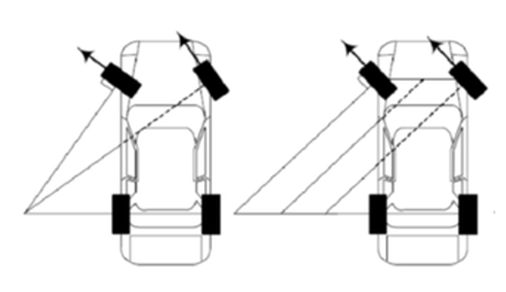
왼쪽 그림과 같이 안쪽 바퀴, 바깥쪽 바퀴의 회전 원의 중심이 일치해야 한다.
- 그렇다면 두 바퀴의 회전 차이를 어떻게 구현해야 할까?
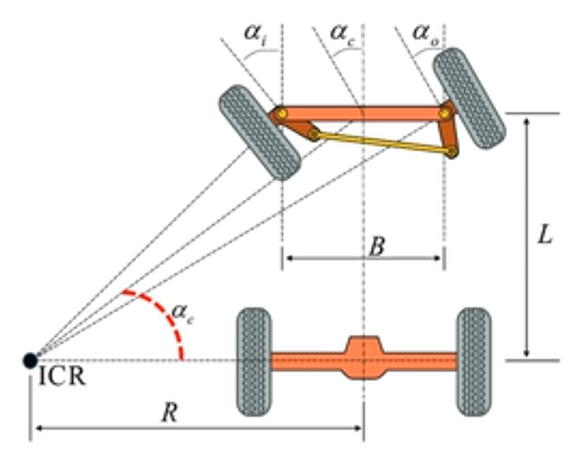
Ackermann Steering
- 간단한 기계식 구조로 회전시 꺾이는 각도가 다르도록 설계
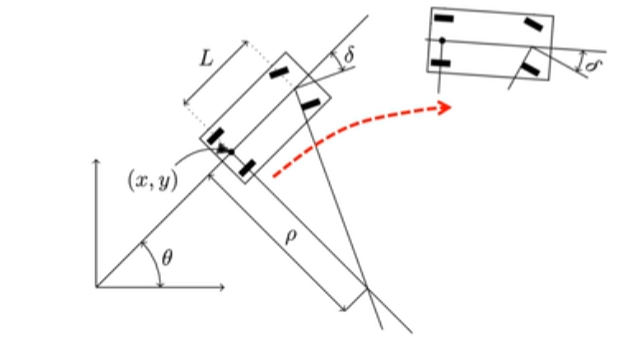
자동차의 위치 정보
- 현재 위치는 (x, y)좌표, θ세타
- 이동 속도는 선속도 v, 각속도 w
- 조향각은 δ델타
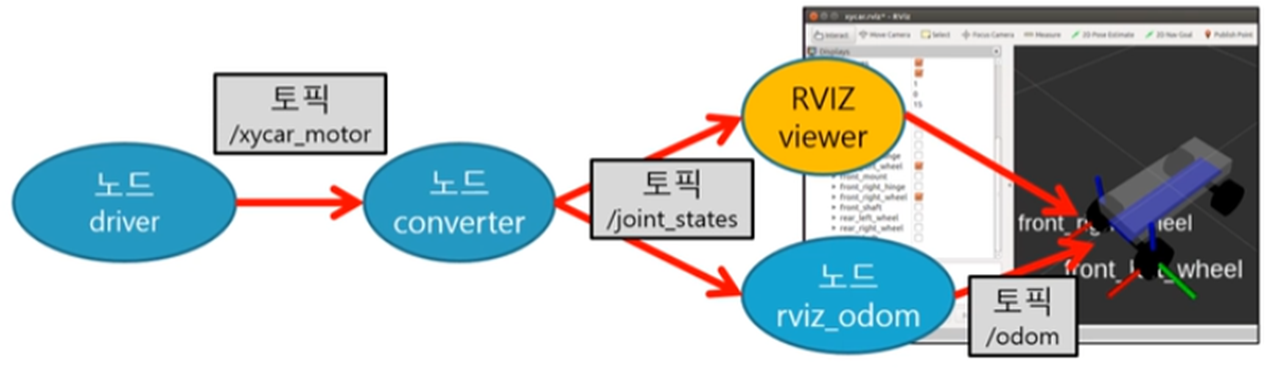
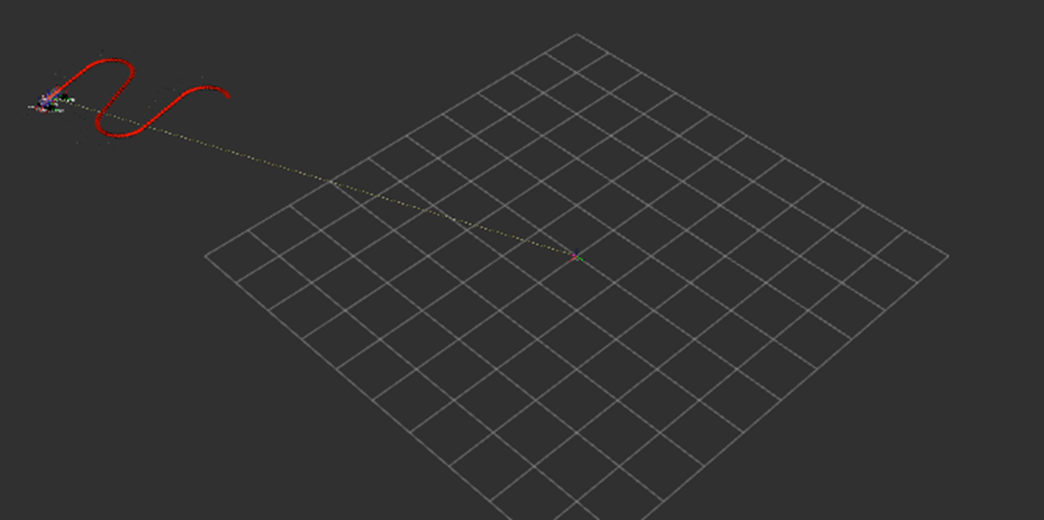
RVIZ 오토메트리
- 오토메트리 토픽 : /odom
- 메시지 타입 : nav_msgs/Odometry
# 토픽 내용 확인
rosmsg show nav_msgs/Odometry
# Output
std_msgs/Header header
uint32 seq
time stamp
string frame_id
string child_frame_id
geometry_msgs/PoseWithCovariance pose
geometry_msgs/Pose pose
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
float64[36] covariance
geometry_msgs/TwistWithCovariance twist
geometry_msgs/Twist twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
float64[36] covariance이번에는 3D 자동차를 진짜 움직여 보자.
- 이전 8자 주행 프로그램에서는 바퀴가 움직이기만 했다.
- 이번에는 움직여 보자.
- 동작 과정
- 파일 구성
- 런치 파일 -
rviz_odom.launch - 소스 파일 -
converter.py,odom_8_drive.py,rviz_odom.py
- 런치 파일 -
실행
선생님 어디가세요?
odom_8_drive.py의 회전 값을 50→60~70정도로 줘야 8자를 그리는 것 같다.
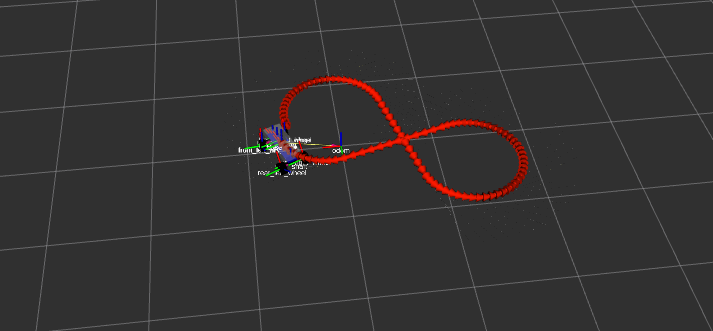
좀 8같다.
올해로 26세