목표
- 3D 모델링된 차량이 8자 주행을 하면서
- 주변 장애물의 거리를 Range로 표시하고
- IMU 센싱값에 따라 차체가 기울어진다.
구조
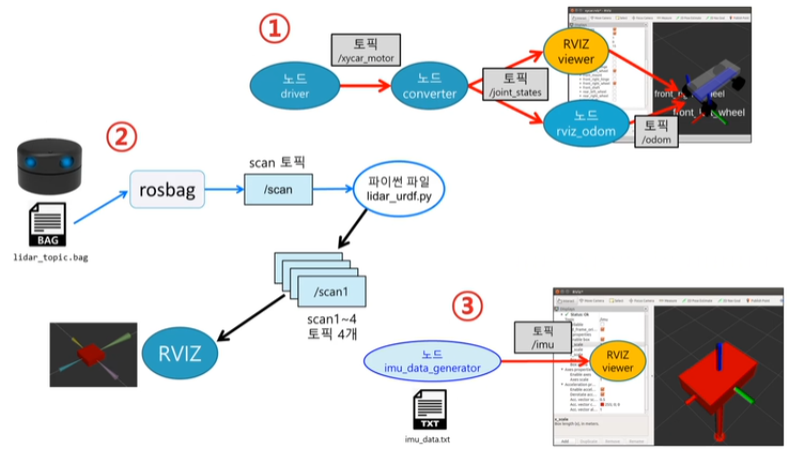
- 자이카 모터 토픽 받아오기
- Lidar 센서 토픽 rosbag으로 받아오기
- imu_data_generator데이터 RVIZ에 표현하기
패키지 구성
- 패키지 이름은
rviz_all- 런치 파일 -
rviz_all.launch - urdf 파일 -
rviz_all.urdf, 기존에 제작한xycar_3d.urdf+lidar_urdf.urdf잘 합쳐보자 - 소스 파일 -
odom_imu.py, 기존에 제작한rviz_odom.py를 수정해 보자
- 런치 파일 -
# 패키지 제작
catkin_create_pkg rviz_all rospy tf geometry_msgs urdf rviz xacro# rviz_all.launch
<launch>
<param name="robot_description" textfile="$(find rviz_all)/urdf/rviz_all.urdf"/>
<param name="use_gui" value="true"/>
<node name="rviz_visualizer" pkg="rviz" type="rviz" required="true"
args="-d $(find rviz_all)/rviz/rviz_all.rviz"/>
<node name="robot_state_publisher" pkg="robot_state_publisher"
type="state_publisher"/>
<node name="driver" pkg="rviz_xycar" type="odom_8_drive.py" />
<node name="odometry" pkg="rviz_all" type="odom_imu.py" />
<node name="converter" pkg="rviz_xycar" type="converter.py" />
<node name="rosbag_play" pkg="rosbag" type="play" output="screen"
required="true" args="$(find rviz_lidar)/src/lidar_topic.bag"/>
<node name="lidar" pkg="rviz_lidar" type="lidar_urdf.py" output="screen"/>
<node name="imu" pkg="rviz_imu" type="imu_generator.py"/>
</launch># rviz_all.urdf
<?xml version="1.0" ?>
<robot name="xycar" xmlns:xacro="http://www.ros.org/wiki/xacro">
<link name="base_link"/>
<link name="baseplate">
<visual>
<material name="acrylic"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<box size="0.5 0.2 0.07"/>
</geometry>
</visual>
</link>
<joint name="base_link_to_baseplate" type="fixed">
<parent link="base_link"/>
<child link="baseplate"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
</joint>
<link name="front_mount">
<visual>
<material name="blue"/>
<origin rpy="0 0.0 0" xyz="-0.105 0 0"/>
<geometry>
<box size="0.50 0.12 0.01"/>
</geometry>
</visual>
</link>
<joint name="baseplate_to_front_mount" type="fixed">
<parent link="baseplate"/>
<child link="front_mount"/>
<origin rpy="0 0 0" xyz="0.105 0 -0.059"/>
</joint>
<link name="front"/>
<joint name="baseplate_to_front" type="fixed">
<parent link="baseplate"/>
<child link="front"/>
<origin rpy="0 0 0" xyz="0.25 0 0"/>
</joint>
<link name="back"/>
<joint name="baseplate_to_back" type="fixed">
<parent link="baseplate"/>
<child link="back"/>
<origin rpy="0 0 3.14" xyz="-0.25 0 0"/>
</joint>
<link name="left"/>
<joint name="baseplate_to_left" type="fixed">
<parent link="baseplate"/>
<child link="left"/>
<origin rpy="0 0 1.57" xyz="0 0.1 0"/>
</joint>
<link name="right"/>
<joint name="baseplate_to_right" type="fixed">
<parent link="baseplate"/>
<child link="right"/>
<origin rpy="0 0 -1.57" xyz="0 -0.1 0"/>
</joint>
<link name="front_shaft">
<visual>
<material name="black"/>
<origin rpy="1.57 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.285" radius="0.018"/>
</geometry>
</visual>
</link>
<joint name="front_mount_to_front_shaft" type="fixed">
<parent link="front_mount"/>
<child link="front_shaft"/>
<origin rpy="0 0 0" xyz="0.105 0 -0.059"/>
</joint>
<link name="rear_shaft">
<visual>
<material name="black"/>
<origin rpy="1.57 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.285" radius="0.018"/>
</geometry>
</visual>
</link>
<joint name="rear_mount_to_rear_shaft" type="fixed">
<parent link="front_mount"/>
<child link="rear_shaft"/>
<origin rpy="0 0 0" xyz="-0.305 0 -0.059"/>
</joint>
<link name="front_right_hinge">
<visual>
<material name="white"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<sphere radius="0.015"/>
</geometry>
</visual>
</link>
<joint name="front_right_hinge_joint" type="revolute">
<parent link="front_shaft"/>
<child link="front_right_hinge"/>
<origin rpy="0 0 0" xyz="0 -0.1425 0"/>
<axis xyz="0 0 1"/>
<limit effort="10" lower="-0.34"
upper="0.34" velocity="100"/>
</joint>
<link name="front_left_hinge">
<visual>
<material name="white"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<sphere radius="0.015"/>
</geometry>
</visual>
</link>
<joint name="front_left_hinge_joint" type="revolute">
<parent link="front_shaft"/>
<child link="front_left_hinge"/>
<origin rpy="0 0 0" xyz="0 0.14 0"/>
<axis xyz="0 0 1"/>
<limit effort="10" lower="-0.34" upper="0.34" velocity="100"/>
</joint>
<link name="front_right_wheel">
<visual>
<material name="black"/>
<origin rpy="1.57 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.064" radius="0.07"/>
</geometry>
</visual>
</link>
<joint name="front_right_wheel_joint" type="continuous">
<parent link="front_right_hinge"/>
<child link="front_right_wheel"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
<axis xyz="0 1 0"/>
<limit effort="10" velocity="100"/>
</joint>
<link name="front_left_wheel">
<visual>
<material name="black"/>
<origin rpy="1.57 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.064" radius="0.07"/>
</geometry>
</visual>
</link>
<joint name="front_left_wheel_joint" type="continuous">
<parent link="front_left_hinge"/>
<child link="front_left_wheel"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
<axis xyz="0 1 0"/>
<limit effort="10" velocity="100"/>
</joint>
<link name="rear_right_wheel">
<visual>
<material name="black"/>
<origin rpy="1.57 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.064" radius="0.07"/>
</geometry>
</visual>
</link>
<joint name="rear_right_wheel_joint" type="continuous">
<parent link="rear_shaft"/>
<child link="rear_right_wheel"/>
<origin rpy="0 0 0" xyz="0 -0.14 0"/>
<axis xyz="0 1 0"/>
<limit effort="10" velocity="100"/>
</joint>
<link name="rear_left_wheel">
<visual>
<material name="black"/>
<origin rpy="1.57 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.064" radius="0.07"/>
</geometry>
</visual>
</link>
<joint name="rear_left_wheel_joint" type="continuous">
<parent link="rear_shaft"/>
<child link="rear_left_wheel"/>
<origin rpy="0 0 0" xyz="0 0.14 0"/>
<axis xyz="0 1 0"/>
<limit effort="10" velocity="100"/>
</joint>
<material name="black">
<color rgba="0.0 0.0 0.0 1.0"/>
</material>
<material name="blue">
<color rgba="0.0 0.0 0.8 1.0"/>
</material>
<material name="green">
<color rgba="0.0 0.8 0.0 1.0"/>
</material>
<material name="grey">
<color rgba="0.2 0.2 0.2 1.0"/>
</material>
<material name="orange">
<color rgba="1.0 0.423529411765 0.0392156862745 1.0"/>
</material>
<material name="brown">
<color rgba="0.870588235294 0.811764705882 0.764705882353 1.0"/>
</material>
<material name="red">
<color rgba="0.8 0.0 0.0 1.0"/>
</material>
<material name="white">
<color rgba="1.0 1.0 1.0 1.0"/>
</material>
<material name="acrylic">
<color rgba="1.0 1.0 1.0 0.4"/>
</material>
</robot># odom_imu.py
#!/usr/bin/env python
import math
from math import sin, cos, pi
import rospy
import tf
import numpy as np
from nav_msgs.msg import Odometry
from geometry_msgs.msg import Point, Pose, Quaternion, Twist, Vector3
from sensor_msgs.msg import JointState
from sensor_msgs.msg import Imu
global Angle
global Imudata
rospy.init_node('odometry_publisher')
Imudata = tf.transformations.quaternion_from_euler(0, 0, 0)
def callback(msg):
global Angle
Angle = msg.position[msg.name.index("front_left_hinge_joint")]
rospy.Subscriber('joint_states', JointState, callback)
def callback_imu(msg):
global Imudata
Imudata[0] = msg.orientation.x
Imudata[1] = msg.orientation.y
Imudata[2] = msg.orientation.z
Imudata[3] = msg.orientation.w
rospy.Subscriber('imu', Imu, callback_imu)
odom_pub = rospy.Publisher("odom", Odometry, queue_size=50)
odom_broadcaster = tf.TransformBroadcaster()
current_time = rospy.Time.now()
last_time = rospy.Time.now()
r = rospy.Rate(30.0)
current_speed = 0.4
wheel_base = 0.2
x_ = 0
y_ = 0
yaw_ = 0
Angle = 0
while not rospy.is_shutdown():
current_time = rospy.Time.now()
dt = (current_time - last_time).to_sec()
current_steering_angle = Angle
current_angular_velocity = current_speed * math.tan(current_steering_angle) / wheel_base
x_dot = current_speed * cos(yaw_)
y_dot = current_speed * sin(yaw_)
x_ += x_dot * dt
y_ += y_dot * dt
yaw_ += current_angular_velocity * dt
odom_quat = Imudata / np.linalg.norm(Imudata)
#odom_quat = tf.transformations.quaternion_from_euler(0, 0, yaw_)
odom_broadcaster.sendTransform(
(x_, y_, 0.),
odom_quat,
current_time,
"base_link",
"odom"
)
odom = Odometry()
odom.header.stamp = current_time
odom.header.frame_id = "odom"
odom.pose.pose = Pose(Point(x_, y_, 0.), Quaternion(*odom_quat))
odom.child_frame_id = "base_link"
odom_pub.publish(odom)
last_time = current_time
r.sleep()결과
# 실행
roslaunch rviz_all rviz_all.launch
난리 났다. (원래 이게 맞음)
고생했던 오류
[ERROR] [1696931554.950944828]: Ignoring transform for child_frame_id "base_link" from authority "unknown_publisher" because of an invalid quaternion in the transform (-0.263765 0.191136 0.000000 -0.033200)odom_quat = Imudata에 집어넣는 과정에서 정규화가 되지 않았다는 오류가 발생했다.numpy를 import한 뒤,odom_quat = Imudata에서odom_quat = Imudata / np.linalg.norm(Imudata)로 수정해 해결했다.
올해로 26세