초음파 센서란?
- 장애물까지의 거리를 알려주는 센서
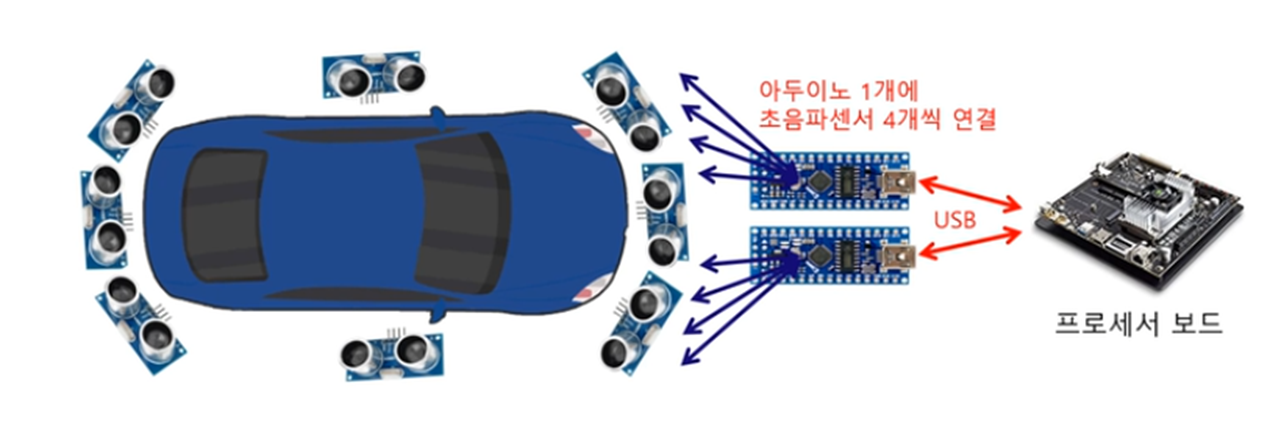
- 자이카에선 전방 3개, 후방 3개, 좌우 1개씩 총 8개가 장착되어 있다.
- 아두이노를 거쳐 프로세서와 연결된다.
ROS 초음파 센서 패키지
패키지 위치
- xycar_ws
- src
- xycar_ultrasonic
- src
초음파 센서 관련 노드와 토픽
- 노드 - /xycar_ultrasonic
- 토픽 - /xycar_ultrasonic
초음파 센서 테스트
패키지 생성
catkin_create_pkg my_ultra std_msgs rospy- 런치 파일 -
ultra_scan.launch - 소스 파일 -
ultra_scan.py
# ultra_scan.launch
<launch>
<node name="xycar_ultrasonic" pkg="xycar_ultrasonic" type="xycar_ultrasonic.py" output="screen"/>
<node name="my_ultra" pkg="my_ultra" type="ultra_scan.py" output="screen"/>
</launch># ultra_scan.py
#!/usr/bin/env python
import rospy
import time
from sensor_msgs.msg import Int32MultiArray
ultra_msg = None
def ultra_callback(data):
global ultra_msg
ultra_msg = data.data
rospy.init_node('ultra_node')
rospy.Subscriber("xycar_ultrasonic", Int32MultiArray, ultra_callback)
while not rospy.is_shutdown():
if ultra_msg == None:
continue
print(ultra_msg)
time.sleep(0.5)실행
roslaunch my_ultra ultra_scan.launch실제 자이카가 없어 실행해 보지는 못했다.
초음파 센서 활용을 위한 준비
자이카의 초음파 센서 동작 구조
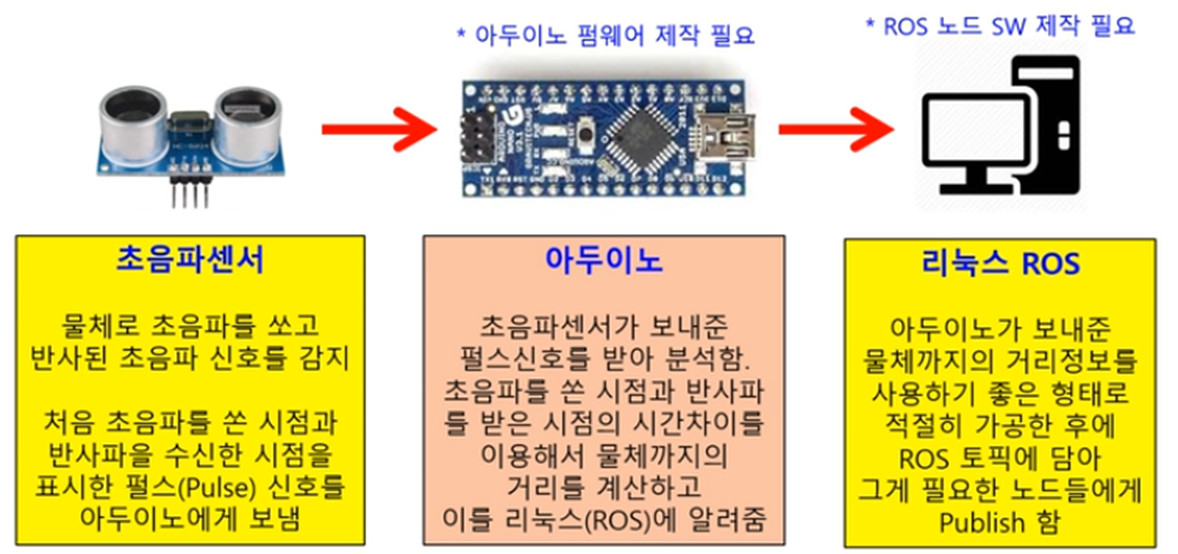
초음파 센서로 거리 측정하기
- 소리의 속도는 340m/s,
- 1cm당 29us소요
- 위 공식을
아두이노IDE를 통해 펌웨어를 작성하면 된다.
#define trig 2 // 트리거 핀 선언
#define echo 3 // 에코 핀 선언
// 센서 여러 개를 사용하려면 trig[4] = { p1, p2, p3, p4 }; 이렇게 선언하자.
void setup()
{
Serial.begin(9600); // 통신속도 9600bps로 시리얼 통신 시작
// Serial.println("Start... Ultrasonic Sensor");
pinMode(trig, OUTPUT); // 트리거 핀을 출력으로 선언
pinMode(echo, INPUT); // 에코핀을 입력으로 선언
}
void loop() {
long duration, distance; // 거리 측정을 위한 변수 선언
// 트리거 핀으로 10us 동안 펄스 출력
digitalWrite(trig, LOW); // Trig 핀 Low
delayMicroseconds(2); // 2us 딜레이
digitalWrite(trig, HIGH); // Trig 핀 High
delayMicroseconds(10); // 10us 딜레이
digitalWrite(trig, LOW); // Trig 핀 Low
// pulseln() 함수는 핀에서 펄스신호를 읽어서 마이크로초 단위로 반환
duration = pulseIn(echo, HIGH);
distance = duration * 170 / 1000; // 왕복시간이므로 340m를 2로 나누어 170 곱하
Serial.print("Distance(mm): ");
Serial.println(distance); // 거리를 시리얼 모니터에 출력
delay(100);
}아두이노→ROS
Serial통신을 통해 접근할 수 있다.python에서Serial모듈을 import해서 코딩- 예시
# ultrasonic_pub.py #!/usr/bin/env python import serial, time, rospy, re from std_msgs.msg import Int32 ser_front = serial.Serial( port='/dev/ttyUSB0', baudrate=9600, ) def read_sensor(): serial_data = ser_front.readline() ser_front.flushInput() ser_front.flushOutput() ultrasonic_data = int(filter(str.isdigit, serial_data)) msg.data = ultrasonic_data # 여러 개 받을 때 사용하는 함수 def read_Sdata(s): s = s.replace(" ", "") s_data = s.split("mm") s_data.remove('/r/n') s_data = list(map(int, s_data)) return s_data if __name__ == '__main__': rospy.init_node('ultrasonic_pub', anonymous=False) # initialize node pub = rospy.Publisher('ultrasonic', Int32, queue_size=1) msg = Int32() # message type while not rospy.is_shutdown(): read_sensor() pub.publish(msg) # publish a message time.sleep(0.2) ser_front.close()set_front부분이 시리얼 통신을 연결하는 설정 코드
올해로 26세