이 포스트의 내용은 Qiskit Textbook | Multiple Qubits and Entanglement - Phase Kickback을 통해 공부한 흔적임을 밝힙니다.
지난 시간에는 CNOT 게이트의 매우 기본적인 결과값을 보았으며
컨트롤 큐비트가 일 때 다음과 같이 얽힘이 발생되는 것을 확인했다.
그런데 만약 뿐만 아니라 도 중첩 상태라면 어떨까?
이를 확인해보기 위해 먼저 필요한 패키지들을 준비한다.
from qiskit import QuantumCircuit, Aer, execute from math import pi import numpy as np from qiskit.visualization import plot_bloch_multivector, plot_histogram from qiskit_textbook.tools import array_to_latex
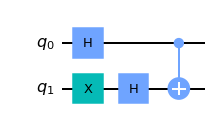
그리고 와 에 H 게이트를 설정한 후에 CNOT 게이트를 설정하는 코드를 작성한다.
qc = QuantumCircuit(2) qc.h(0) qc.h(1) qc.cx(0,1) qc.draw()
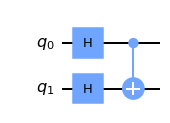
위 회로에서 상태벡터는 다음과 같이 나타날 것이다.
CNOT 게이트를 적용하면 과 가 뒤바뀌지만 티가 나지 않는다.
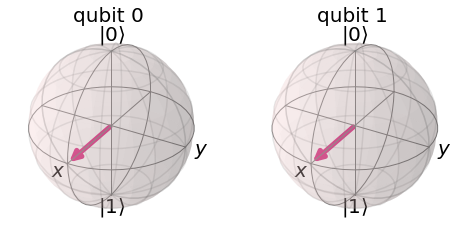
실제로 실행해보면,
statevector_backend = Aer.get_backend('statevector_simulator') final_state = execute(qc,statevector_backend).result().get_statevector() array_to_latex(final_state, pretext="\\text{Statevector} = ", precision=1) plot_bloch_multivector(final_state)
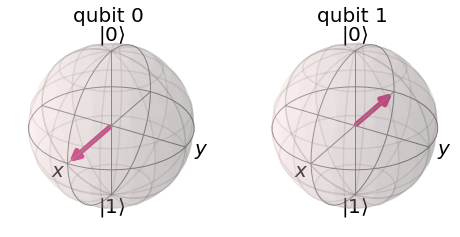
이번에는 타겟이 인 경우를 생각해보자.
qc = QuantumCircuit(2) qc.h(0) qc.x(1) qc.h(1) qc.draw()
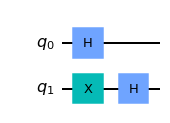
위 회로에서 상태벡터는 다음과 같이 나타날 것이다.
final_state = execute(qc,statevector_backend).result().get_statevector() array_to_latex(final_state, pretext="\\text{Statevector} = ", precision=1) plot_bloch_multivector(final_state)
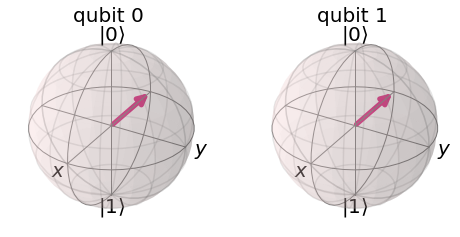
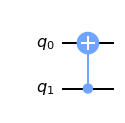
그리고 여기에 CNOT 게이트를 설정하면 다음과 같이 과 가 뒤바뀐다.
이것은 타겟 큐비트의 상태를 로 유지한 채 컨트롤 큐비트를 에서 로 바꾼다.
실제로 코드를 작성해보면,
qc.cx(0,1) display(qc.draw()) final_state = execute(qc,statevector_backend).result().get_statevector() array_to_latex(final_state, pretext="\\text{Statevector} = ", precision=1) plot_bloch_multivector(final_state)
역방향 CNOT 게이트
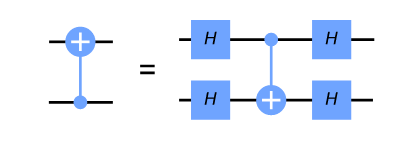
H 게이트는 을 로, 을 로 변화시킨다.
이러한 H 게이트의 항등식으로 인해
H 게이트들로 둘러쌓인 CNOT 게이트는 역방향 CNOT 게이트와 동일하다.

// 이에 대해서는 다음 시간에 더 자세히 알아보도록 하겠다.
실제로 코드를 통해 행렬을 출력해봄으로써 이를 확인해보자.
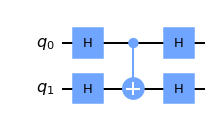
먼저 H 게이트들로 둘러쌓인 CNOT 게이트의 행렬을 출력해보면,
qc = QuantumCircuit(2) qc.h(0) qc.h(1) qc.cx(0,1) qc.h(0) qc.h(1) display(qc.draw()) unitary_backend = Aer.get_backend('unitary_simulator') unitary = execute(qc,unitary_backend).result().get_unitary() array_to_latex(unitary, pretext="\\text{Circuit = }\n")
그리고 역방향 CNOT 게이트의 행렬을 출력해보면,
qc = QuantumCircuit(2) qc.cx(1,0) display(qc.draw()) unitary_backend = Aer.get_backend('unitary_simulator') unitary = execute(qc,unitary_backend).result().get_unitary() array_to_latex(unitary, pretext="\\text{Circuit = }\n")
위상 반동 Phase Kickback
CNOT 게이트에서의 반동
우리는 방금 다음이 성립하는 것을 확인했다.
이것은 위상 반동의 한 예시다.
위상 반동은 매우 중요하며 양자 알고리즘에서 많이 사용되는 것으로,
게이트에 의해 큐비트에 추가된 고유값이 제어된 연산을 통해 다른 큐비트에 반동을 일으키는 것을 의미한다.
예를 들어, 에 X 게이트를 적용하면 그 위상이 이 된다.
을 타겟으로 하는 CNOT 게이트에서
컨트롤 큐비트가 또는 일 때 이 위상은 전체 상태에 영향을 주지만
이것은 전역 위상이기 때문에 관찰 가능한 효과는 없다.
// 양자 상태의 표현에 대해 이야기할 때 언급했듯이,
// 전역 위상만 다르고 나머지는 동일한 상태들은 물리적으로 구분되지 않는다.
흥미로운 점은, 컨트롤 큐비트가 중첩 상태에 있다면
컨트롤 큐비트의 방향 구성요소가 타겟 큐비트의 위상 계수에 영향을 주고
이것은 다시 컨트롤 큐비트의 상대 위상에 반동을 형성한다는 것이다.
CNOT 게이트를 H 게이트로 감싸는 것은 큐비트의 기저를 (, )에서 (, )으로 변환한다.
어떤 하드웨어는 한 방향으로의 CNOT만 허용하는데
이 변환 특성을 통해 CNOT을 양 방향 모두 가능하게 할 수 있어 유용하다.
T 게이트에서의 반동
지금까지는 X 게이트에 컨트롤을 추가한 제어된 X 게이트 즉, CNOT 게이트만을 봐왔지만
T 게이트에도 컨트롤을 추가하여 제어된 T 게이트를 만들 수 있다.
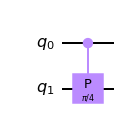
이것은 따로 제공되지는 않고 다음과 같이 만들어 사용한다.
qc = QuantumCircuit(2) qc.cp(pi/4, 0, 1) qc.draw()
T 게이트의 행렬은 다음과 같다.
그리고 제어된 T 게이트의 행렬은 다음과 같다.
이것은 코드를 통해서도 확인할 수 있다.
unitary_backend = Aer.get_backend('unitary_simulator') unitary = execute(qc,unitary_backend).result().get_unitary() array_to_latex(unitary, pretext="\\text{Controlled-T} = \n")
이걸 일반화하면 에 대하여 제어된 U 연산을 다음과 같이 나타낼 수 있다.
혹은, 큐비트의 순서에 따라 다음과 같이 나타낼 수도 있다.
상태벡터 에 T 게이트를 적용하면 이 큐비트에 만큼의 위상이 더해진다.
이것은 전역 위상이기에 관측할 수 없지만
에 있는 다른 큐비트를 이용해 제어함으로써 제어 큐비트의 상대 위상을 변경한다.
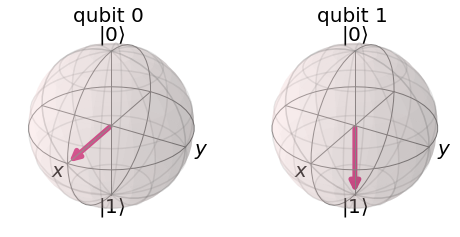
예를 들어,
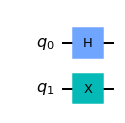
는 코드로 다음과 같이 나타낼 수 있는데
qc = QuantumCircuit(2) qc.h(0) qc.x(1) display(qc.draw()) final_state = execute(qc,statevector_backend).result().get_statevector() plot_bloch_multivector(final_state)
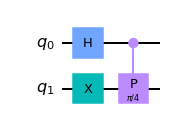
여기에 제어된 T를 적용하면
qc.cp(pi/4, 0, 1) display(qc.draw()) final_state = execute(qc,statevector_backend).result().get_statevector() plot_bloch_multivector(final_state)
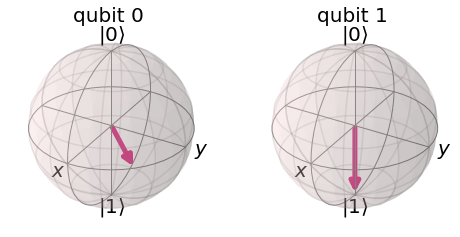
컨트롤로 사용된 가 축을 기준으로 만큼 회전한 것을 확인할 수 있다.
정확히는 제어된 T 게이트로 연결된 두 큐비트 모두 회전한 건데
이는 제어된 게이트는 컨트롤과 타겟을 하나씩 갖는 대신
두 개의 컨트롤 큐비트를 갖는다는 것을 보여준다.
// 만약 가 이 아니라 이라면 컨트롤이 0이므로 회전하지 않을 것이다.
이것이 Qiskit에서 제어된 Z 게이트를 다음과 같이 방향성 없이 그리느 이유이기도 하다.