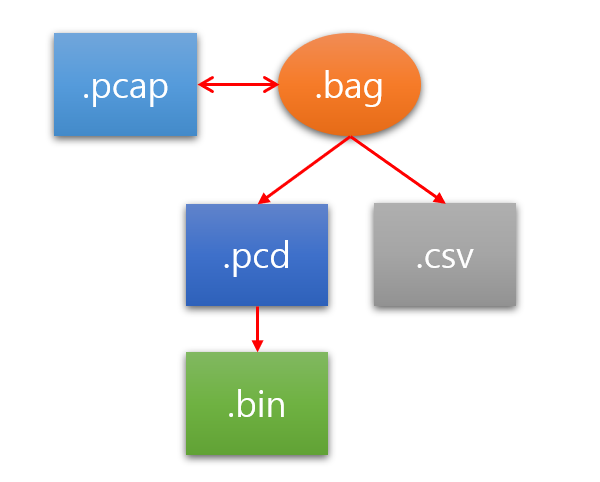
ROS 환경에서 라이다 데이터는 주로 bag 파일로 저장 되어진다. 하지만 활용하기 위해서는 pcd나 bin 파일로 변환 해줘야 한다.
1) bag ->
1-1) bag to pcd
rosrun pcl_ros bag_to_pcd <input_file.bag> <topic> <output_directory>예를 들면 rosrun pcl_ros bag_to_pcd test.bag /os1_cloud_node/points ./home 와 같다.
실시간으로 변환 하기 위해서는 아래 코드를 이용한다.
$ rosrun pcl_ros pointcloud_to_pcd input:=/velodyne/pointcloud2
혹은
$ rosrun pcl_ros pointcloud_to_pcd input:=/os1_cloud_node/points1-2) bag to CSV
2) pcd ->
2-1) pcd to image
$ rosrun pcl_ros convert_pcd_to_image <cloud.pcd>[PCD시각화 방법]
pcl-tools 패키지 설치$ rosrun perception_pcl pcd_viewer <filename> $ pcd_viewer <filename> $ pcl_viewer -multiview 1 <pcd_filepath>
2-1) pcd 파일 뷰어
pcd 파일 뷰어 설치
$ sudo apt-get install -y pcl-tools원하는 파일을 Visualization
$ pcl_viewer <파일명>.pcd2-2) pcd 데이터 확인
$ head "<파일명>"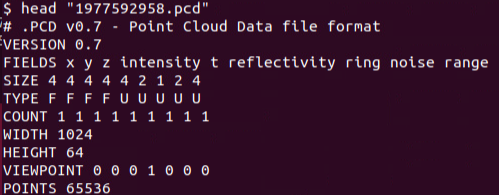
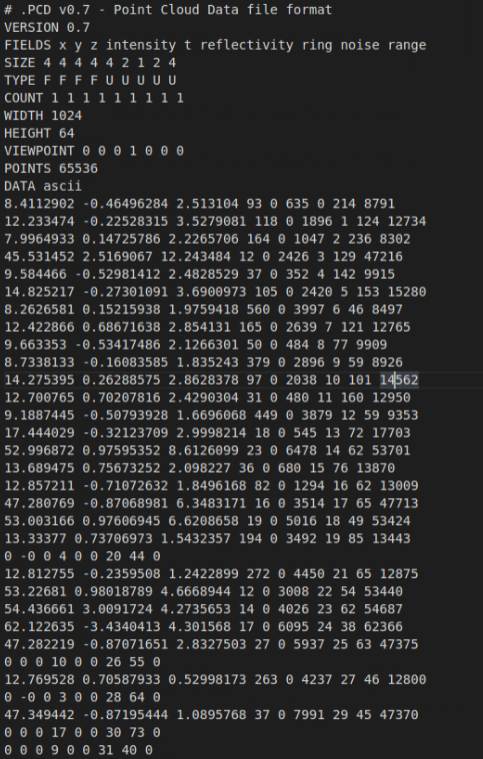
Visual Studio를 통해 pcd 파일을 불러오면 데이터 확인 가능하다. 이 경우 DATA는 ascii 타입으로 fileds 정보가 표현된다
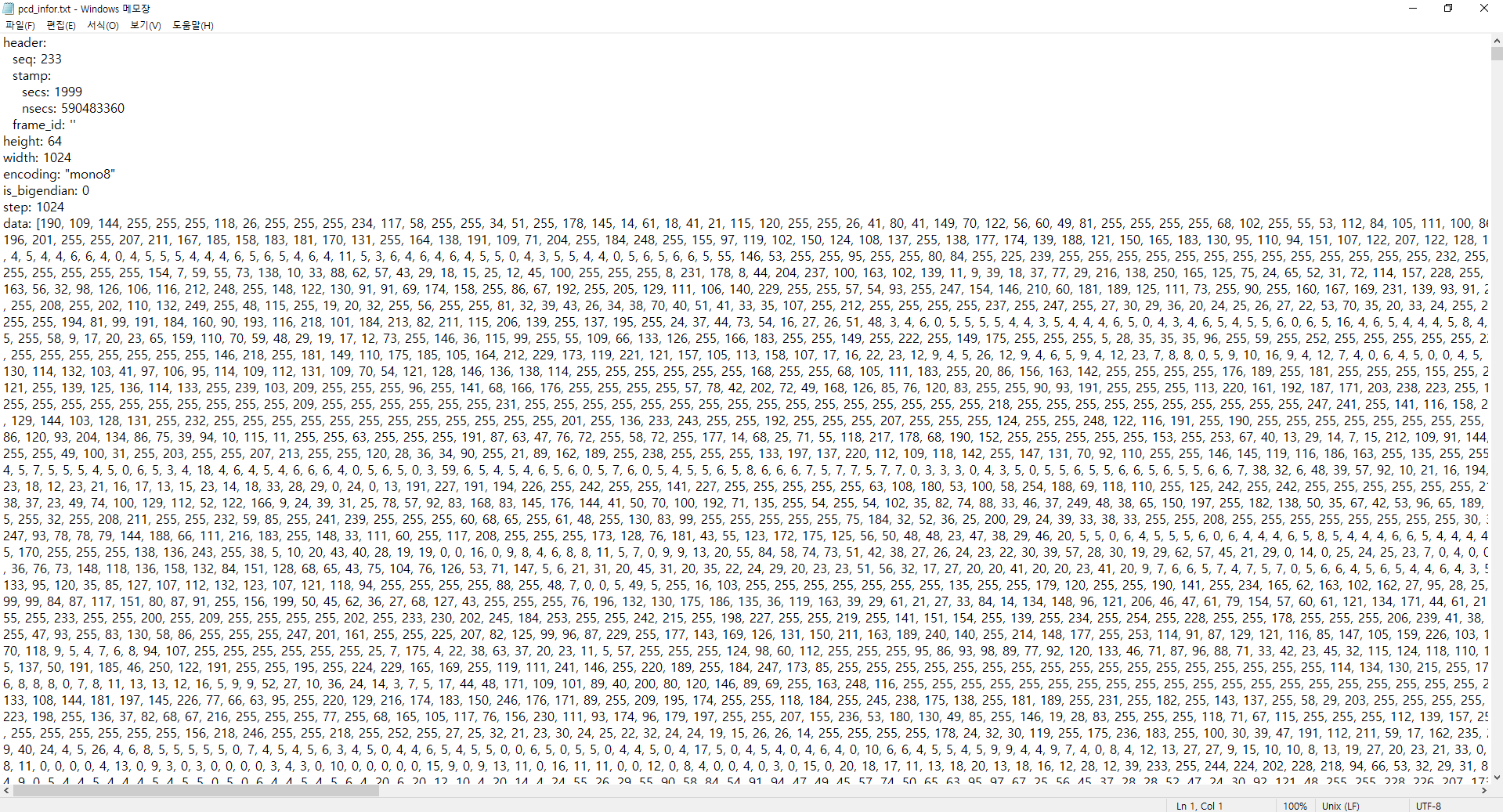
만약 binary 타입으로 DATA를 열 경우에는 아래와 같은 결과가 나타나는데 ascii 타입과 달리 fields 순서대로 데이터가 제공되지 않아 이해하는데 어려움이 있다
(데이터 전체 내용은 아래 txt를 확인할 것)
2-3) pcd to bin
3) pcap ->
3-1) pcap to bag
Ouster 라이다 센서 데이터인 .pcap 파일을 bag 파일로 변환하는 툴을 설명한다. 아래 페이지 참고.
pcap to bag tools
# 워크 스페이스 생성
$ mkdir -p my_ws/src
$ git clone https://github.com/Krishtof-Korda/pcap-to-bag.git
$ cd myworkspace
# ouster 워크 스페이스와 링크가 필요하다.
$ ln -s /path/to/ouster_ws ./src/ # 본인이 가지고 있는 ouster 워크 스페이스 경로를 /path/to/ouster_ws 대신 넣어주자.
$ ln -s /my_ws ./src/ # 위에서 다운 받은 워크 스페이스 경로를 넣어주자.
$ catkin_make -DCMAKE_BUILD_TYPE=Release빌드가 성공하면,
pcap_to_bag 실행 파일은
folder: my_ws/devel/lib/pcap_to_bag/에 있으며,
./pcap_to_bag (name_of_pcap.pcap) (name_of_bag.bag) number_of_laser_channels로 실행이 가능하다. 즉, 예를 들어, 64채널 라이다를 이용한 pcap 파일이라면,
./pcap_to_bag my.pcap my.bag 643-2) pcap to las
참고 : ouster sdk site
To convert to the first 5 scans of our sample data from a pcap file to LAS, you can try:
$ python3 -m ouster.sdk.examples.pcap $SAMPLE_DATA_PCAP_PATH $SAMPLE_DATA_JSON_PATH pcap-to-las --scan-num 53-3) pcap to pcd
참고 : ouster sdk site
To convert to the first 5 scans of our sample data from a pcap file to PCD, you can try:
$ python3 -m ouster.sdk.examples.pcap $SAMPLE_DATA_PCAP_PATH $SAMPLE_DATA_JSON_PATH pcap-to-pcd --scan-num 5