Lidar
1.Velodyne lidar Build-up

pc 환경 : Ubuntu 18.04 melodic, ROS1fatal erro pcap.h 발생시$ cd ~/catkin_ws$ rosdep install --from-paths src --ignore-src --rosdistro melodic -ypc IP : 19
2.Ouster lidar build-up & Ouster Studio
pc 환경 : Ubuntu 18.04, ROS 1OS1 초기 IP : 192.168.0.551) apt-get 최신화$ sudo apt-get update$ sudo apt-get upgrade2) gcc install $ sudo add-apt-repository p
3.Point Cloud data에 snow 필터 적용하기
현재 라이다 포인트 클라우드에서 스노우(일종의 노이즈)를 필터링하는 분야는 CAN 워터루 대학의 WAVE Lab이 가장 뛰어나다. 다행히 해당 교수가 운영하는 깃허브에 라이다 디스노우 알고리즘을 오픈 소스로 공개해 놔서 손쉽게 다운로드가 가능했다$ cd cat_sens
4.Point Cloud & PCL
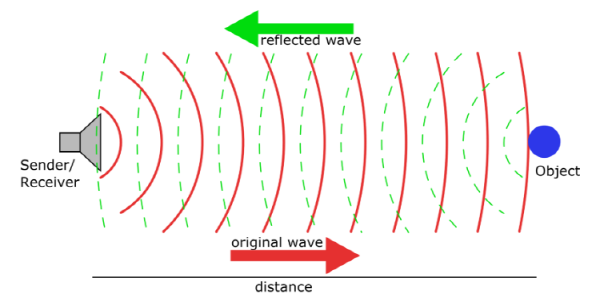
Lidar 센서, RGB-D센서 등으로 수집되는 데이터를 의미한다.이러한 센서들은 아래 그림처럼 물체에 빛/신호를 보내서 돌아오는 시간을 기록하여 각 빛/신호 당 거리 정보를 계산하고, 하나의 포인트(점)을 생성한다.포인트 클라우드는 3차원 공간상에 퍼져 있는 여러 포
5.[Lidar 파일 변환]bag to csv,pcd & pcd viewer & pcap to bag(Ouster)
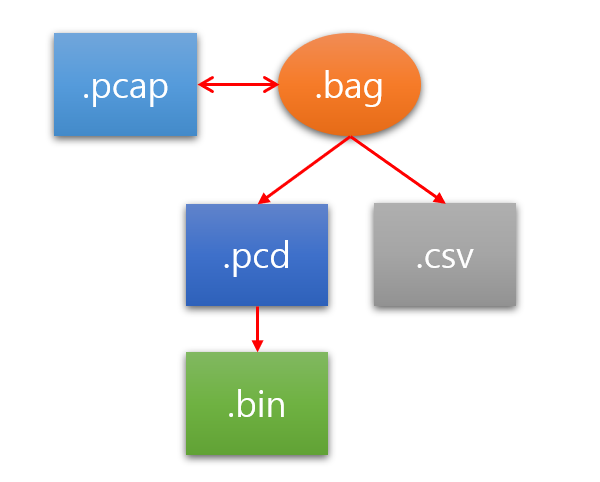
라이다 데이터는 주로 bag 파일로 저장 되어진다. 하지만 활용하기 위해서는 pcd나 bin 파일로 변환 해줘야 한다.예를 들면 rosrun pcl_ros bag_to_pcd test.bag /os1_cloud_node/points ./home 와 같다.실시간으로 변환
6.Calibration with LiDAR & IMU
LiDAR를 사용하는 SLAM에 IMU와 LiDAR 사이의 캘리브레이션이 필수!캘리브레이션을 통해 외부 파라미터를 추출하여 SLAM 알고리즘에 사용.extrinsic transformation matrix(extrinsicTrans)extrinsic rotation m