논문 리뷰
1.[논문 리뷰] Policy Gradient Methods for Reinforcement Learning with Function Approximation
소개 업로드중.. Paper link 강화학습의 시초 같은 논문을 읽어보겠다. NeuralPS (NIPS)에 기재된 논문이다. Abstract Function approximation (함수 근사)는 강화학습에서 필수적이지만, value fuction을 근사하고
2025년 2월 18일
2.[논문 리뷰] Learning robust autonomous navigation and locomotion for wheeled-legged robots
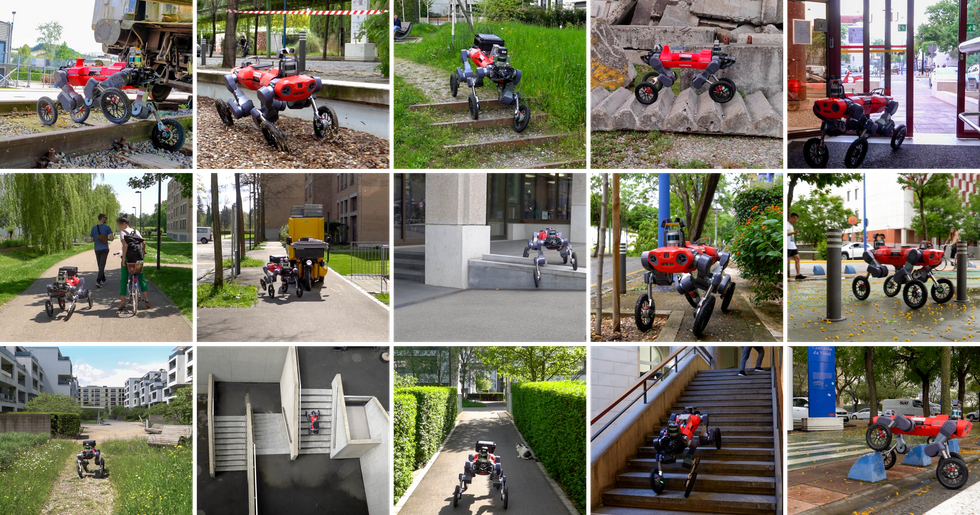
본 연구는 적응형 이동 제어, 이동성 인식 기반의 지역 내비게이션 계획, 그리고 도시 내 대규모 경로 계획을 포함하는 통합형 시스템을 소개한다.
2025년 3월 18일
3.[논문 리뷰] TACO: Temporal Latent Action-Driven Contrastive Loss for Visual Reinforcement Learning

TACO 논문 링크 Introduction 배경: 픽셀 이미지만 보고도 게임이나 로봇을 잘 제어할 수 있는 알고리즘들이 많이 나왔지만 여전히 샘플 효율성이 낮다는 문제가 있다. 즉, 환경에서 너무 많은 경험(데이터)을 필요로 한다. 과거 연구들은 이 문제를 해결하려
2025년 6월 16일
4.[논문 리뷰] OpenVLA: An Open-Source Vision-Language-Action Model
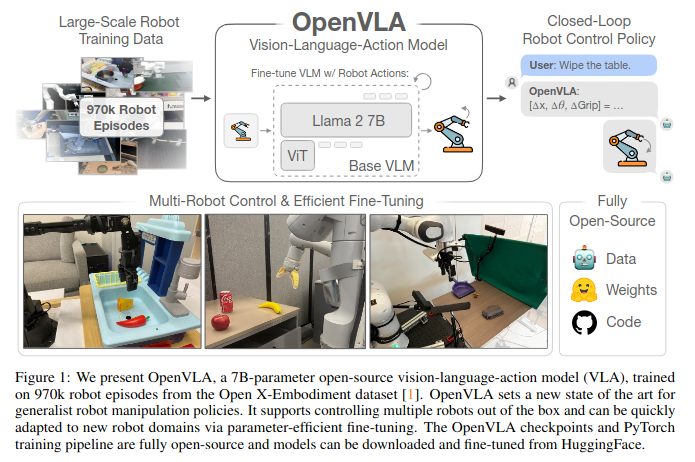
OpenVLA 논문 링크OpenVLA는 970,000개의 로봇 에피소드를 기반으로 학습된 7B 파라미터의 오픈 소스 비전-언어-행동 모델(VLA)이다.
2025년 6월 17일
5.[논문 리뷰] π0.5: a Vision-Language-Action Model with Open-World Generalization

Paper 링크 Website 링크 Abstract 이 모델은 이질적인 다양한 작업에 대한 co-training을 통해 광범위한 일반화를 가능하게 함 π0.5 시스템은 이미지 관찰, 언어 명령, 객체 탐지 등을 결합한 hybrid multi modal example들과 공동 학습 방식을 사용함 Introduction 기존 문제점 open world...
2025년 7월 22일