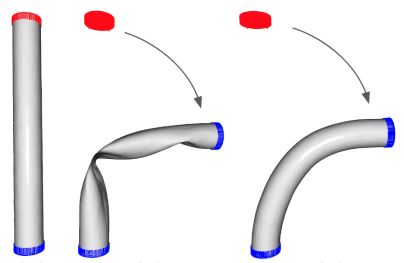
동기: NeRF로 학습된 object의 shape을 원하는데로 deform할 수 있을까? NeRF-Editing: Geometry Editing of Neural Radiance Fields 같은 경우는 메쉬로 변환하고 ARAP으로 변형한다음 결과를 다시 NeRF에 적용했다. 변형에 걸리는 시간은 ARAP이 더 빠르겠지만 어떻게 meshing 하느냐에 따라 결과가 달라질 것이다. 이 논문은 아예 새로운 network를 하나 학습시켜 계산량이 많은데, 문제 푸는 방식은 더 정석적이다.
Smoothing, sharpening은 optimization 통해서 새 파라미터를 훈련시켜서 만드는데 각 항은, 원본 유지, normal 유지, curvature 변형으로 이루어져있다.
Deformation을 위해서는 먼저 zero isosurface 위에 있는 점들을 sampling 한다. 저자들은 Langevin dynamics를 이용한 xt+1=x~t−F(x~t)nF(x~t), x~t∼N(xt,σI) 식을 따라 sampling 하였다. 이 때, x0은 [-1, 1]에서 sampling됨. 이 때, point들이 curvature가 큰 구간에 집중되는 현상을 막기 위해서 첫 sampling때 surface에서 너무 먼 점들은 (-1,1로 normalize된 공간에서 거리가 0.1 이상) reject하는 식으로 꽤 균일하게 얻어낼 수 있었다고 한다. 이게 첫 x0은 그냥 [-1, 1]에서 sampling하고 그 주변 점들을 Langevin dynamics를 이용해 수차례 반복해서 얻고, 다시 새 x0을 찾아서 반복하는 방식인 것 같다.
Deformation field는 neural network Dθ에 의해 정의되는 neural field이다. 이 때, 원 공간과 deform 공간의 one-to-one correspondence를 보장하기 위해 Dθ를 invertible하게 설계한다. NeRF 등에서 말하듯 MLP를 이용해서 복잡한 prediction을 하려면 sin(ax+b)같은 periodic function을 사용하는 것이 좋은데 (Fourier features let networks learn high frequency functions in low dimensional domains 참조), Invertible residual networks에 따르면 f(x)=x+g(x)가 invertible하기 위한 충분 조건은 g의 Lipschitz constant가 1보다 작아야한다. 따라서 periodic function을 normalize한 ∣a∣−1sin(ax+b)을 사용할 것이고, 구체적으로 positional encoding은
이다. 저자들이 ablation study 해본 결과, deformation field가 invertible하지 않은 경우 topology가 깨지고, positional encoding하지 않는 경우 복잡한 변형을 예측하지 못했다.
이제 우리는 deformed 공간의 x를 입력으로 받아 input 공간의 y를 출력하는 Dθ를 얻었다. Dθ를 훈련시키기 위한 loss는 stretching과 bending을 줄일 수 있도록 설계한다. 먼저 stretching은 surface의 tangent vector의 길이 변화로(이는 다시 tangent vector의 dot-product로) 측정될 수 있다. 먼저 tanget vector를 구해야하는데, nGθ(x)를 x에서의 surface normal이라고 하면 tangent space에 대한 projection matrix는 PGθ(x)=I−nGθ(x)nGθ(x)T이다. 그렇다면 임의의 vector v에 대해 tanget vector는 PGθ(x)v이다. (근데 임의의 v는 어떻게 구한다는거지?) 이제 tangent dot-product의 변화를 계산해보자. ti, tj를 deformed 공간의 점 x에서의 임의의 두 tangent vector라고 하자. Dθ에 의해 transform 하면 t′=JDθ(x)t 일 것이다 (Jacobian과 tangent space 관계 참조).
Bending은 surface의 curvature의 변화로 볼 수 있다. 이는 surface normal direction을 따른 tangent dot product의 변화로 측정될 수 있으니, curvature를 directional derivative 또는 Hessian을 이용해 구할 수 있다.
dtdt1Tt2∣∣∣∣∣t=0=t1THGθ(x)t2
이 때, t는 x+tn(x)에 의해 normal 방향 성분이다. 그래서 curvature의 변화는