1. MLP의 한계
- 구조적 한계
- MLP(fully-connected)는 층이 깊어지고 뉴런의 수가 많아지면 가중치 수가 급격히 늘어남
- 이는 학습해야 할 매개변수의 수가 많아져 오버피팅의 위험이 커지고, 계산 복잡도가 증가하는 한계가 됨
- 위치 민감성
- MLP는 이미지의 특정 패턴의 위치에 민감함
- 즉, 인풋 이미지의 모든 정보를 일차원 벡터로 변환해 처리하기 때문에, 패턴의 위치에 종속된 결과를 내게 됨
- 이는 이미지에서 패턴이 어디에 위치해 있는지에 따라 결과가 달라질 수 있음을 의미하며, 이미지의 위치 불변성을 보장하지 못 함
- MLP는 이미지의 특정 패턴의 위치에 민감함
- 패턴의 차이
- MLP는 입력을 일차원 벡터로 변환해 처리하기 때문에, 이미지에서 같은 숫자 '5'라도 위치나 크기가 조금만 달라져도 다른 숫자로 판단할 수 있음
- 크기 조절의 필요성
- 이미지 인식에서 패턴이 위치나 크기에 따라 인식 결과가 달라질 수 있기 때문에, MLP로 숫자를 인식하려면 숫자의 크기와 위치를 비슷하게 맞추는 전처리가 필요함
- 이미지 인식에서 패턴이 위치나 크기에 따라 인식 결과가 달라질 수 있기 때문에, MLP로 숫자를 인식하려면 숫자의 크기와 위치를 비슷하게 맞추는 전처리가 필요함
2. CNN의 등장
- 1980년대 Kunihiko Fukushima의 Neocognitron이라는 신경망에서 CNN 기초 개념 유래되었음. 이는 계층적 구조를 통해 시각적 패턴을 인식할 수 있는 신경망이었으며, 이는 뒤이어 나올 CNN의 발전에 큰 영향을 미쳤음
- 1998년 Yann LeCun 교수가 LeNet 발표
- 그 중 LeNet-5는 1998년 발표된 CNN 모델로, 숫자 필기체를 인식하는 문제에서 큰 성과를 보였음 (MNIST 데이터셋 사용)
- LeNet-5는 현대적인 CNN의 원형으로, 컨볼루션 레이어와 풀링 레이어, 완전 연결층이 결합된 구조를 갖고 있으며, 오늘날 많은 컴퓨터 비전 응용에 사용되는 CNN 아키텍처의 기반이 되었음
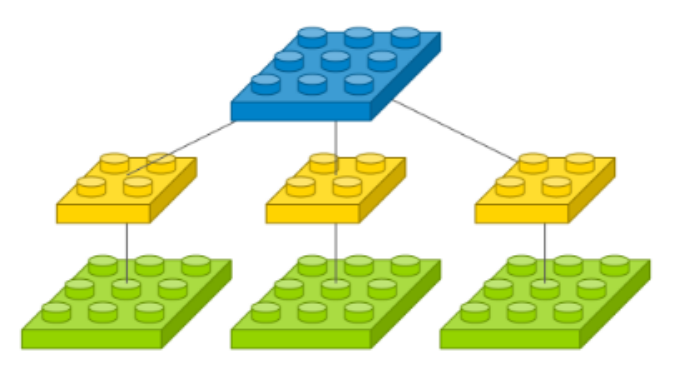
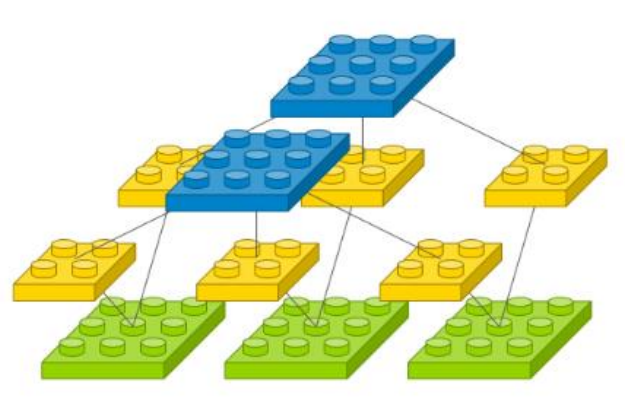
3. CNN 개요
-
MLP에서는 각 입력마다 다른 가중치들이 계산되며 적용되었는데, CNN에서는 계산을 효율적으로 만들기 위해 가중치 뉴런을 공유하는 방식(=필터 혹은 커널)을 사용함
-
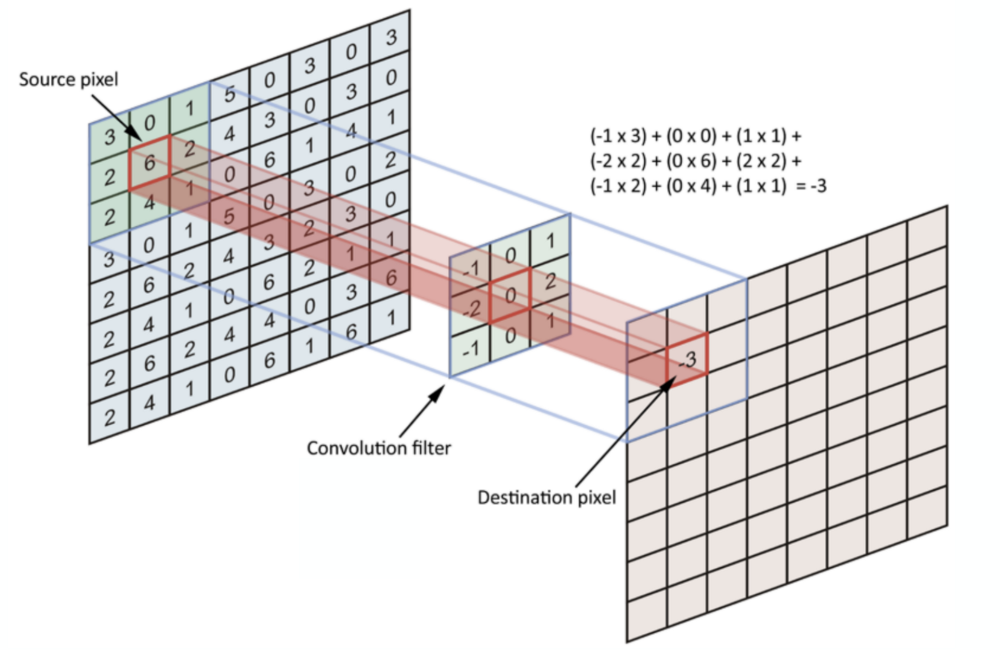
CNN(Convolution Neural Network, 합성곱) : 이미지에서 특징을 추출하기 위해 필터(= 커널, 마스크)를 사용하는 방법
- 필터와의 합성곱을 통해 이미지의 특정 특징(엣지, 텍스처, 패턴 등)을 추출하며, 신경망이 이미지를 더 잘 이해하고 분류하도록 함
- CNN은 학습을 통해 자동으로 적합한 필터를 생성함
- 필터 종류 : 엣지 검출 필터(Sobel, Prewitt, Laplacian), 블러 필터, 샤프닝 필터, 가우시안 필터, 평균 필터 등 (필터 크기는
5×5나7×7등 임의의 크기로 설정 가능)
※ 이미지 크기는 (가로, 세로, 채널)로 표현됨
- 특성맵(Feature Map) : 합성곱 계층의 입출력 데이터로, 2차원 평면(채널)으로 구성됨 (입력의 각 위치에 필터가 적용되어 계산된 결과)
- 필터의 개수는 모델 설계 시 학습할 피처 개수와 관련된 하이퍼 파라미터로, 직접 정하는 값임 (예, 필터 5개를 사용했다면 이미지에서 특징 5개 추출)
- 필터가 이미지의 각 위치에서 계산된 결과가 모여 하나의 피처맵이 됨
- 여러 필터를 사용하는 경우 각 필터는 독립적인 피처맵을 생성하며, 이 피처맵들이 쌓여 채널 방향으로 다음 레이어로 전달됨
- 흑백 이미지(예, MNIST) 깊이는 1, RGB 이미지의 경우에는 3 ← 채널 을 말하는 것! (색상 정보)
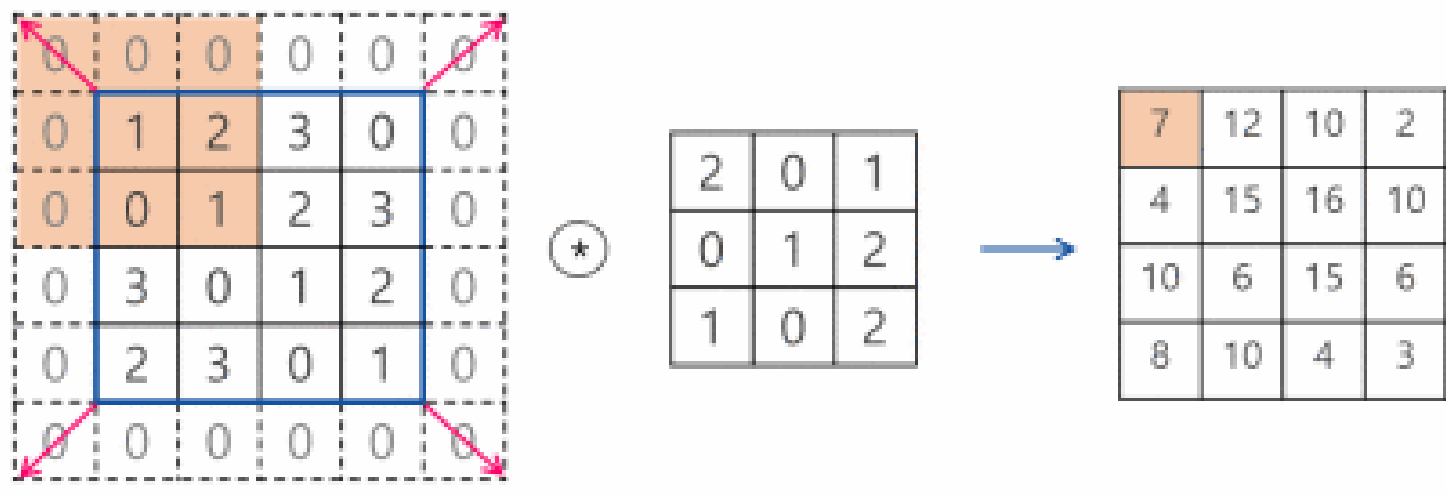
- 패딩(Padding) : 필터 크기로 인해 이미지 가장자리 부분 데이터가 부족해 입력과 출력 크기가 달라지는데, 이를 보정하기 위해 입력 신호의 가장자리 부분에 0을 미리 채워넣는 것
- Conv2D 계층에서는 padding 파라미터를 사용해 패딩을 지정할 수 있음
valid: 패딩 사용 X (유효 영역만 출력하므로 출력 이미지 사이즈는 인풋 사이즈보다 작아짐)same: 출력 차원이 입력과 같아지도록 적절한 수의 패딩을 자동으로 입력하는 것
- Conv2D 계층에서는 padding 파라미터를 사용해 패딩을 지정할 수 있음
- 축소 샘플링(subsampling) : 컨볼루션 결과에서 핵심적인 정보만 추출해 다음 레이어로 전달하는 과정
- 필터 수를 늘리면 피처맵 개수가 커지게 되는데, 중요한 정보만 선택적으로 전달해 데이터 차원을 줄이고 모델의 복잡성을 감소시키는 역할을 함
- 일반적으로 pooling과 stride를 통해 축소 샘플링을 구현함
-
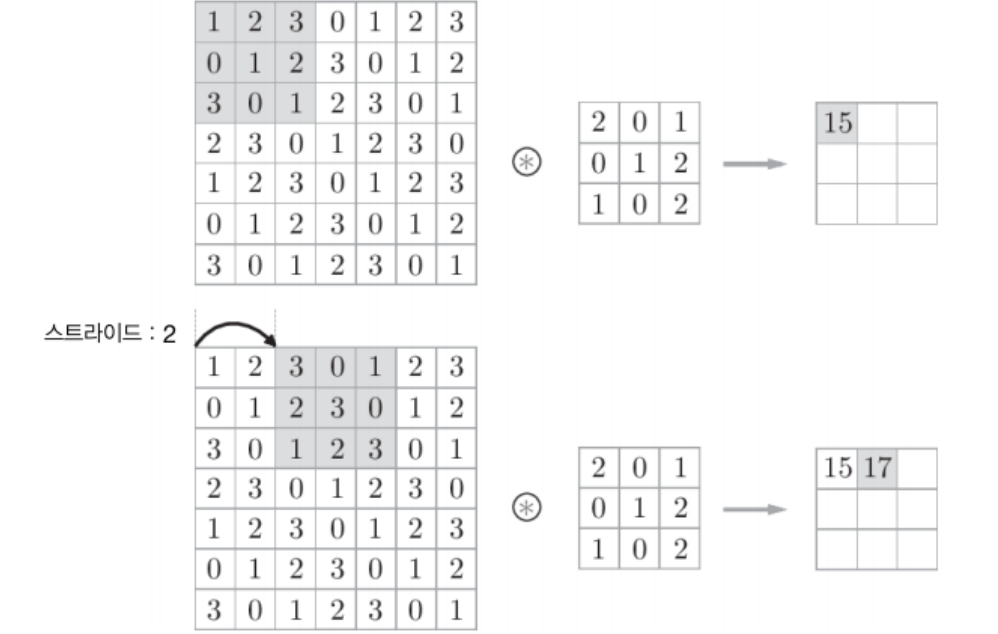
스트라이드(stride) : 컨볼루션 수행할 때 필터를(예,
3×3)를 한 픽셀씩 이동하지 않고, 여러 픽셀씩 건너 뛰면서 이동하며 출력 얻는 방법- 2-stride를 사용하면 필터를 두 픽셀씩 건너뛰며 이동함 (출력 피처맵 크기가 절반으로 감소)
- 3-stride를 사용하면 세 픽셀씩 건너뛰며 이동해, 출력 크기가 1/9로 감소
-
풀링(pooling) : 컨볼루션 결과를 다음 레이어로 모두 전달하지 않고, 일정 범위 내에서(예,
2×2픽셀 범위) 대표값을 선택해 전달하는 방법Max Pooling: 특정 범위 내 최대값 선택 (대표 정보만 남기고 나머지 신호 제거함. 입력의 변화에 영향 적게 받음)Average Pooling: 특정 범위 내 평균값 선택 (전체 정보를 고르게 반영하며, 평활하게 일반적인 정보 유지함)
4. CNN 아키텍처
🟠 요 약
Convolution Layer : 가중치 공유 → 파라미터 개수 감소, 계산량 감소
Pooling Layer : 이미지 크기 감소 → 파라미터 개수 감소, 계산량 감소
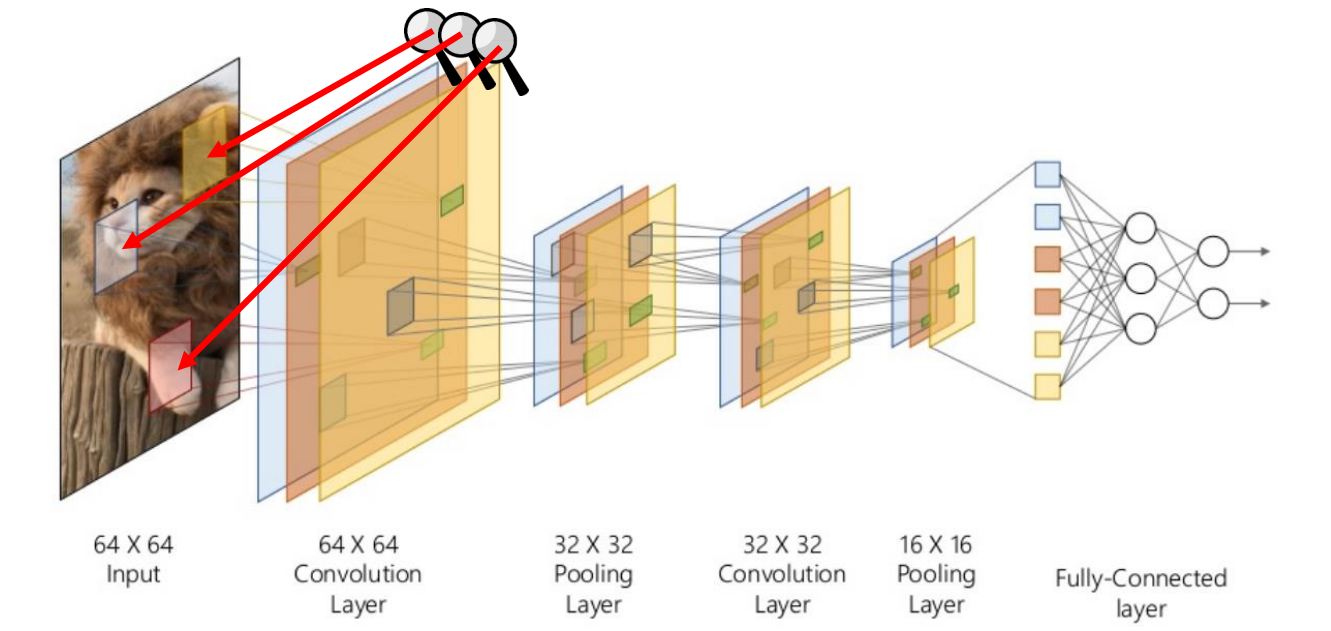
입력 이미지 → Conv+ReLU+Pooling → h(x)+ReLU → h(x) → Flatten → Fully Connected Layer → Softmax → 결과값
| 단 계 | 설 명 |
|---|---|
| 입력 | 네트워크에 이미지 (64, 64, 3) 입력 |
| Conv + ReLU + Pooling | Conv : 이미지 특징을 추출 - 필터의 개수가 32개라고 가정하면 (64, 64, 32) ← 출력 이미지 채널 수가 필터 개수로 바뀜ReLU : 비선형성 도입해 모델이 복잡한 패턴을 학습할 수 있게 함 Pooling : Max Pooling이나 Average Pooling을 통해 공간 크기 줄임 → (2×2) 필터 사용 시 (64, 64, 32)에서 (32, 32, 32)로 줄어듦 |
| h(x) + ReLU | h(x) : Conv 레이어의 아웃풋 (32, 32, 32)ReLU : 비선형성 추가해 모델이 복잡한 패턴을 학습할 수 있게 함 |
| h(x) | 중간 출력 값으로서, 다음 단계로 전달됨 (32, 32, 32) |
| Flatten | h(x)를 1차원 벡터로 변환해 Fully Connected Layer에 입력할 수 있도록 함 - 출력 크기 (32*32*32,) |
| Fully Connected Layer | 이전 단계의 특징 벡터를 입력으로 받아 전체 연결된 뉴런들로 변환해 더 복합적인 특징 학습함. 뉴런 수가 128이라면 출력 크기는 (128,) |
| Softmax | 마지막 출력 레이어로, 클래스별 확률을 계산해 최종 (다중) 분류 수행함. 클래스 수가 10이라면 출력 크기는 (10,) |
| 출력 | Softmax 결과를 기반으로 예측된 클래스 혹은 확률값 산출 |
컨볼루션 레이어
- 이미지 전체에 걸쳐 동일한 가중치를(필터) 적용함으로써, 이미지 위를 슬라이딩하며 패턴을 인식함
- 필터가 각 채널에 개별적으로 적용되는 것이 아니라, 입력의 모든 채널을 함께 고려해 특징을 추출하는 것
- 이 때, 동일한 가중치를 반복적으로 사용하기 때문에 파라미터 수가 줄어듦
- 공간 크기는 그대로 유지되지만 채널 수는 필터 개수만큼 늘어남
- 각 필터는 입력 이미지의 채널을 합쳐 하나의 채널을 생성하기 때문에, 필터의 수가 곧 출력의 채널 수(피처맵의 개수)가 됨
- 채널 수의 증가는 더 많은 필터를 사용해 각기 다른 특징을 학습하는 과정에서 발생함. 즉, 필터의 개수가 늘어날수록 출력 이미지의 채널 수가 증가하게 됨
풀링 레이어
- 공간 크기를 줄임으로써 연산량을 줄이고 오버피팅을 방지하며 중요한 특징만 남김
- 일반적으로 공간 크기(너비와 높이)를 줄이지만 채널 수는 유지함
✅ 컨볼루션 레이어에서 가중치를 공유함으로써 학습해야 할 파라미터 수가 감소하는 원리
- MLP의 FCL(은닉층, 출력층)에서는 입력의 모든 픽셀에 대해 각각의 뉴런이 별도의 가중치를 가짐. 즉, 모든 입력 픽셀과 뉴런이 서로 연결되기 때문에 매우 많은 수의 파라미터가 필요함
- 예, 인풋 이미지 크기가
(32×32×3) = 총 픽셀 개수 3072개이며 뉴런의 개수가100개라면, 각 뉴런은3072개의 가중치를 가짐 (전체3072 * 100 = 307200개의 가중치)
- 예, 인풋 이미지 크기가
- 컨볼루션 레이어에서는 특정한 크기의 필터가 이미지의 전체 위치에 동일하게 적용됨 = 가중치 공유
- 예, 필터 크기가
3×3이고 입력 채널 수가3이라면, 필터 하나는(3×3×3) = 27개의 가중치로 구성됨. 그리고 필터 개수가32개라면 총 가중치 개수는27*32 = 864개임 - 이 필터는 이미지의 모든 위치에 반복적으로 적용되기 때문에, 각 위치에서 새로운 가중치를 학습할 필요가 없고 동일한 가중치를 적용해서 전체적으로 학습해야 하는 파라미터의 개수가 줄어듦
- 예, 필터 크기가
컨볼루션 레이어 예시 (Keras)
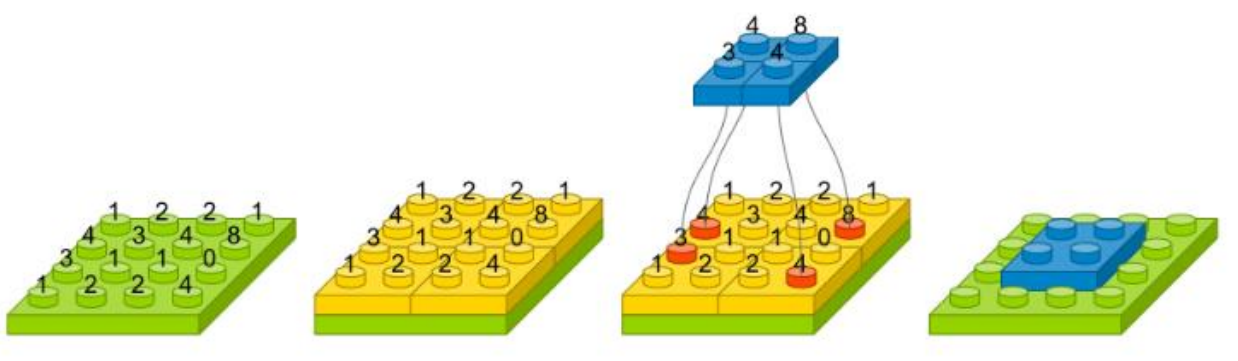
- 필터 적용
- 인풋 이미지에 필터(커널)를 슬라이딩하며 컨볼루션 연산 수행
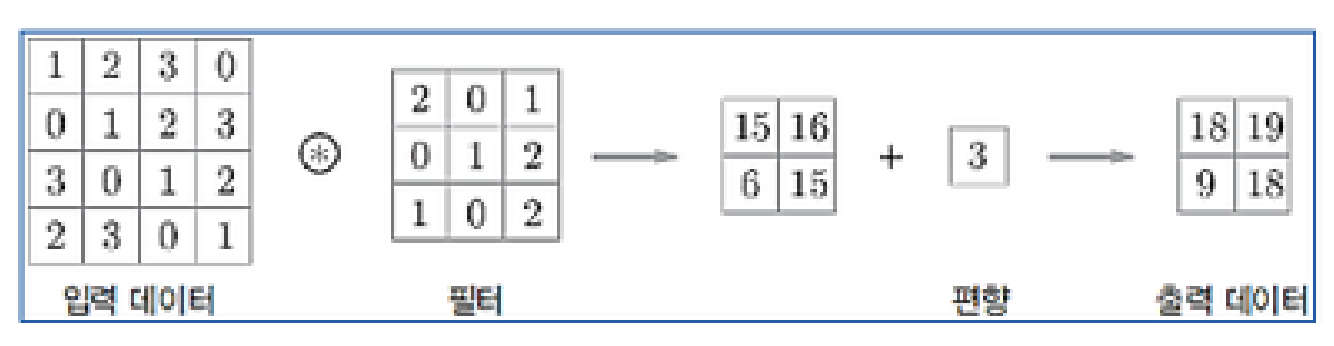
- 각 필터는 입력 이미지의 각 위치에 해당하는 픽셀값과 자신의 가중치를 곱한 후, 그 결과를 모두 더한 값으로 피처맵의 한 픽셀값을 생성한
- 각 필터 별로 피처맵 생성
- 하나의 필터는 인풋 이미지의 모든 채널에 대해 연산을 수행해 하나의 피처맵을 생성함
- 여러 개의 필터를 사용하면 각각의 필터는 독립적인 특성맵을 생성함 (필터 개수만큼 피처맵이 생성되고 이 피처맵들이 합쳐져 출력이 됨)
# 1 Conv2D(filters=3, # 컨볼루션 필터 개수 kernel_size=(2, 2), # 필터 크기 padding='same', # 패딩 (인풋, 아웃풋 사이즈 동일) input_shape=(3, 3, 1), # 입력 이미지 크기
# 2 Conv2D(filters=1, kernel_size=(2, 2), padding='same', input_shape=(3, 3, 3))
# 3 Conv2D(filters=2, kernel_size=(2, 2), padding='same', input_shape=(3, 3, 3))
# pool_size, stride 파라미터 예시 MaxPooling2D(pool_size=(2, 2), stride=(2, 2)) # pool_size : 맥스 풀링 크기 # stride : 스트라이드 크기
flatten(): 다차원 피처맵을 1차원 벡터로 변환하는 기능 (예,(8, 8, 32)→(8 * 8 * 32) = 2048- 1차원 벡터로 처리한 후 FCL에 전달해 최종 작업 수행
4-1. 오버피팅 방지 기법
- Early Stopping
- L1, L2 regularization
- Dropout : 학습 동안에만 적용되고 학습 종료 후 예측 단계에서는 모든 유닛을 사용함
- Data Augmentation
roation_range,width_shift_range,height_shift_range,shear_range,zoom_range,horizontal_flip,vertical_flip
- 가중치 초기값 설정 (Xavier 초기화, He 초기화)
- 모델의 수렴 속도 및 학습 안정성을 위해 가중치를 적절히 초기화하는 것이 중요함
- 적절한 가중치 초기화는 네트워크가 학습 초기에 활성화 함수의 기울기 소실이나 기울기 폭발 문제를 방지하게 해 줌 (특히 네트워크가 깊어질수록 중요)
- 전 레이어 노드를 이용해 표준편차가 인 정규분포로 초기화하는 방법
- 예, 입력 노드가 100개라면 표준편차가 인 정규분포에서 가중치를 샘플링함
- Xavier 초기화 (활성화 함수로 sigmoid, tanh 등 사용 시 효과적)
- Batch Normalization
- 각 레이어에서 출력값의 분포가 너무 한쪽으로 치우치거나 폭발하지 않도록 정규화해 학습 속도를 높이고 안정성을 유지하기 위해 사용
- 활성화 함수 전 또는 후에 배치되어 출력값의 평균을 0으로, 분산을 1로 정규화
- 정규화된 값에 (스케일링)와 (시프트)를 곱하고 더해 학습 가능한 형태로 만들어 줌
- 활성화 함수에서 기울기 소실을 방지해주고 모델의 수렴이 더욱 빨라짐

적당히 공부한 거 정리하는 곳