사실 3주차 포스팅 이후로 복습을 하지 않고 일주일 동안 버닝을 했더니 그 사이에 완강을 해버렸다. 복습 좀 제때 하자
DISCLAIMER: 아래 내용은 오로지 Coursera 강의를 토대로 제가 이해한 대로 정리한 것이기 때문에 부정확하거나 설명이 그닥 친절하지 않은 부분이 있을 수도 있습니다.
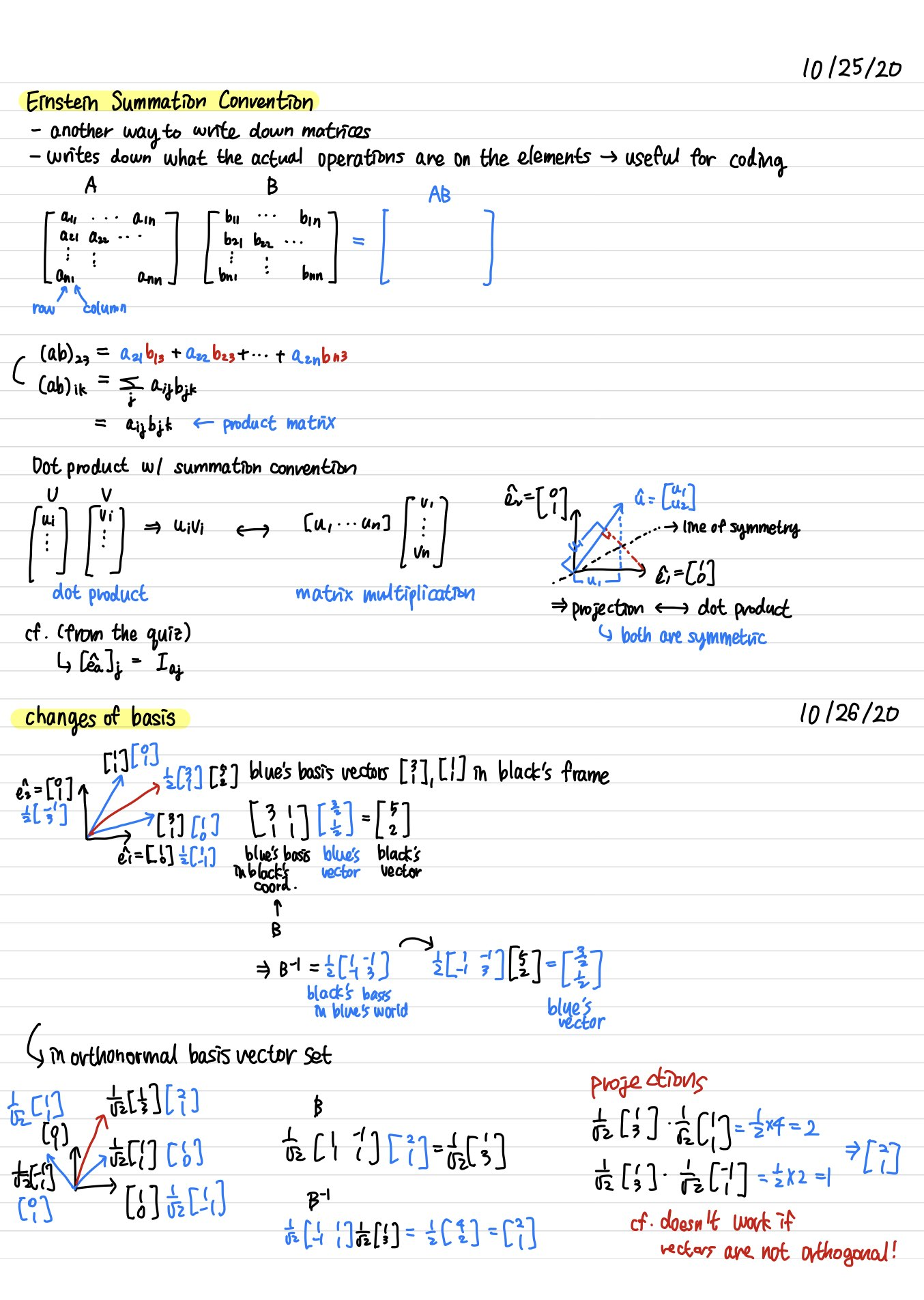
아인슈타인 표기법(Einstein summation convention)
아인슈타인 표기법(Einstein summation convention)은 행렬 공식을 간결하게 표현하는 또 다른 방법이라고 볼 수 있다. 대충 시그마를 생략하는 거라고 생각하면 될 것 같다.
다음과 같은 행렬 A와 B가 있다고 하자.
A=⎣⎢⎢⎢⎢⎡a11a21⋮an1a12a22⋮an2⋯⋯⋯a1na2nann⎦⎥⎥⎥⎥⎤, B=⎣⎢⎢⎢⎢⎡b11b21⋮bn1b12b22⋮bn2⋯⋯⋯b1nb2nbnn⎦⎥⎥⎥⎥⎤
이 두 행렬의 곱 AB 중에서 2열 3행에 위치한 (ab)23의 값은 다음과 같이 구할 수 있다.
(ab)23=a21b13+a22b23+⋯+a2nbn3
아인슈타인 표기법을 이용하면 이 과정을 모든 원소에 대해서 다음과 같이 정리할 수 있다.
(ab)ik=∑j=1aijbjk=aijbjk
아인슈타인 표기법으로 내적(dot product) 공식을 간단히 할 수 있다.
u=⎣⎢⎢⎢⎢⎡u1u2⋮un⎦⎥⎥⎥⎥⎤, v=⎣⎢⎢⎢⎢⎡v1v2⋮vn⎦⎥⎥⎥⎥⎤가 있을 때, 이 두 벡터의 내적은 다음과 같이 표현할 수 있다.
u⋅v=∑i=1uivi=uivi
행렬곱과 역행렬을 이용한 기저변환
사영벡터를 이용하는 방법 뿐만 아니라, 행렬곱과 역행렬을 이용하여 기저변환을 하는 방법도 있다.
기저벡터가 e^1=[10], e^2=[01]인 벡터공간이 있다고 하자. 또 다른 벡터공간(강의에서는 판다의 벡터공간이라고 부른다)의 기저벡터는 기존 벡터공간에서 표현했을 때 [31], [11]라고 하고, 행렬 [3111]로 나타낼 수 있다.
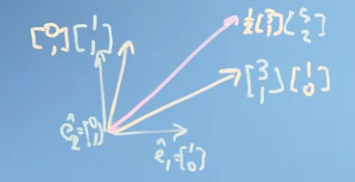
판다의 벡터공간 안에서 정의된 벡터 [2321]가 있다. 이 벡터를 e^1, e^2로 정의된 기존 벡터공간의 값으로 변환하려면 다음과 같이 하면 된다.
[3111][2321]=[52]
비슷한 방식으로 변환된 값을 다시 판다의 공간으로 변환을 하려면 [3111]의 역행렬을 곱해주면 된다.
21[1−1−13][52]=[2321]
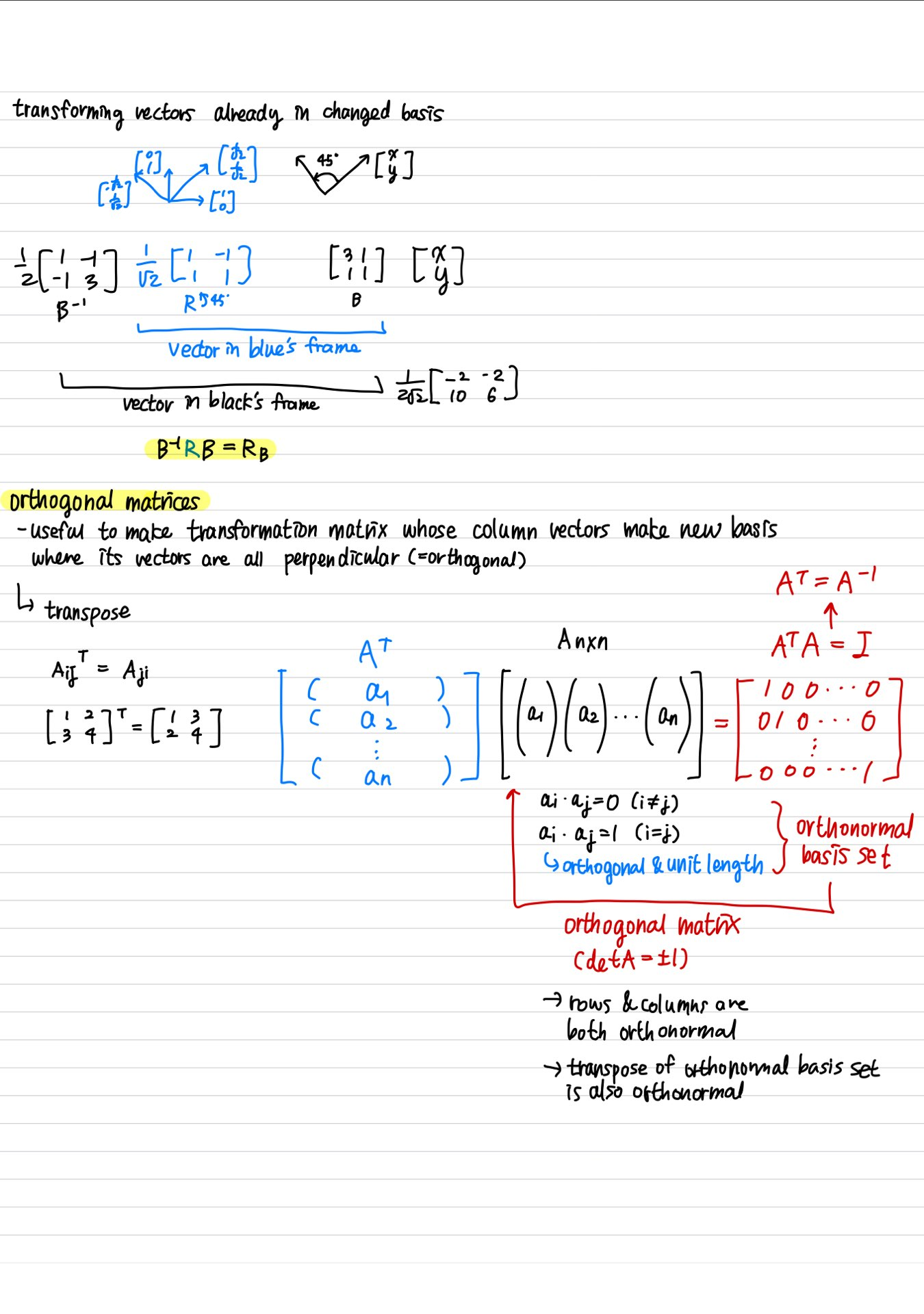
직교행렬(orthogonal matrix)과 전치(transpose)
전치(transpose)라는 것은 행렬을 대각선 기준으로 뒤집는 것을 의미하고, T를 사용하여 표현한다.
AijT=Aji
[1324]T=[1234]
벡터 a1, a2, ⋯, an으로 이루어진 n×n 행렬 A가 있다고 하자. A를 구성하는 벡터들은 다음과 같은 성질을 갖는다.
ai⋅aj=0 (i=j)
ai⋅aj=1 (i=j)
즉, A의 벡터들은 모두 orthogonal하며 unit length를 가지므로 orthonormal basis set를 이룬다. 이러한 행렬을 직교행렬(orthogonal matrix)라고 부른다. 참고로 detA=±1이다.
직교행렬의 행과 열은 모두 orthonormal하다. 또한 orthonormal basis set을 전치(transpose)한 결과 값도 orthonormal하다.
직교행렬 A의 전치행렬은 A의 역행렬과 동일하다. (AT=A−1 ↔ ATA=I)
필기 첨부