
과제 03번 ADT
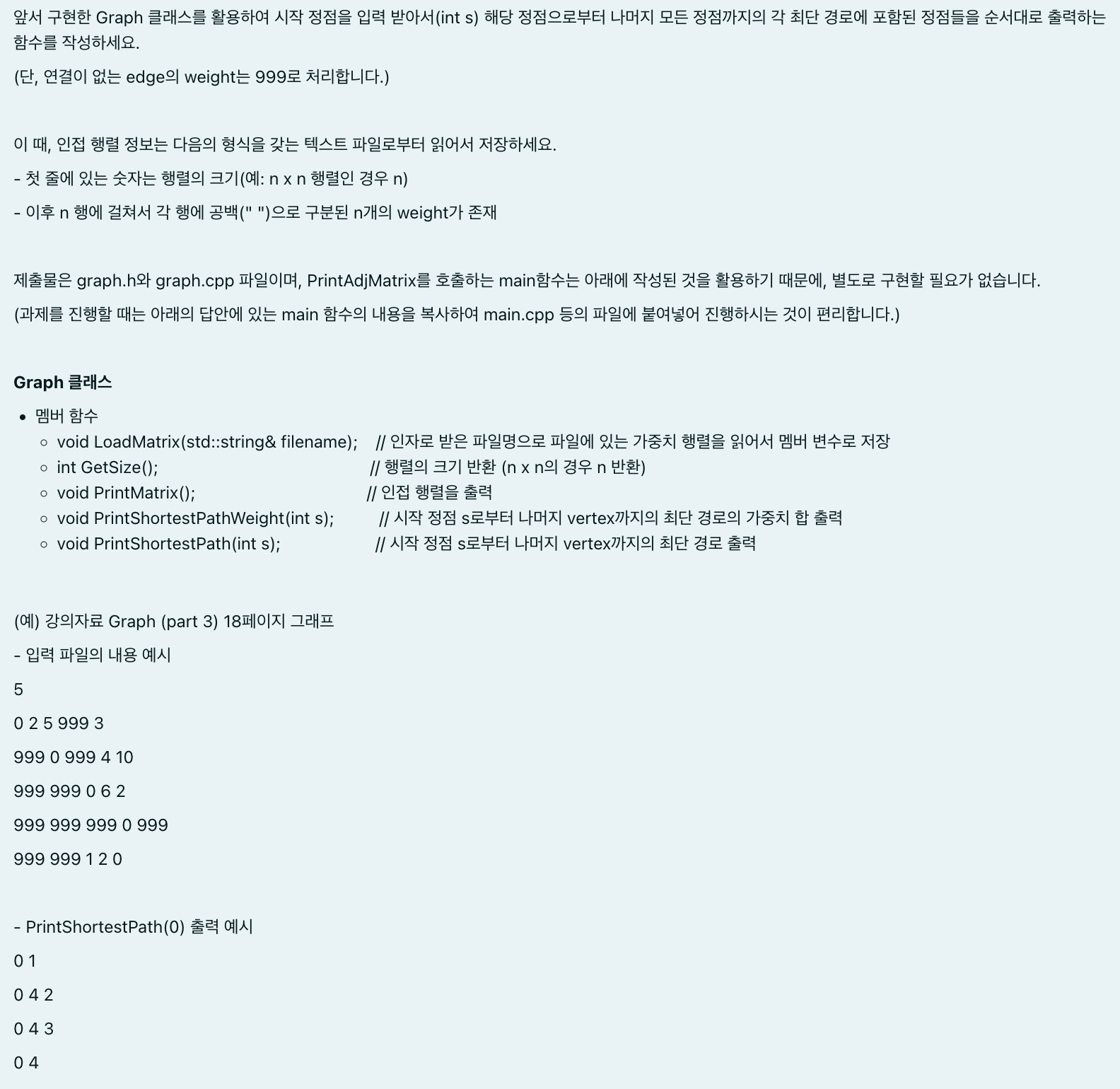
- 수업시간에 배운 다익스트라 알고리즘을 사용하여 최단거리 경로를 구하는 문제이다.
- 강의에선 C++ STL의
std::priority_queue를 쓰는 방법으로 예시를 들어주셨지만priority_queue<pair<distance,vertex>>에서 임의의pair의distance를 수정, 수정 후 정렬하는 메소드를 제공하지 않아 이를 모두 구현해야하는 불편함이 있었다.(일일이 pop하여 temp에 저장하고 다시 추가해줘야한다..
(하지만 O(n^2) -> O(nlogn)으로 개선된 시간복잡도를 보인다.)- 난 STL의
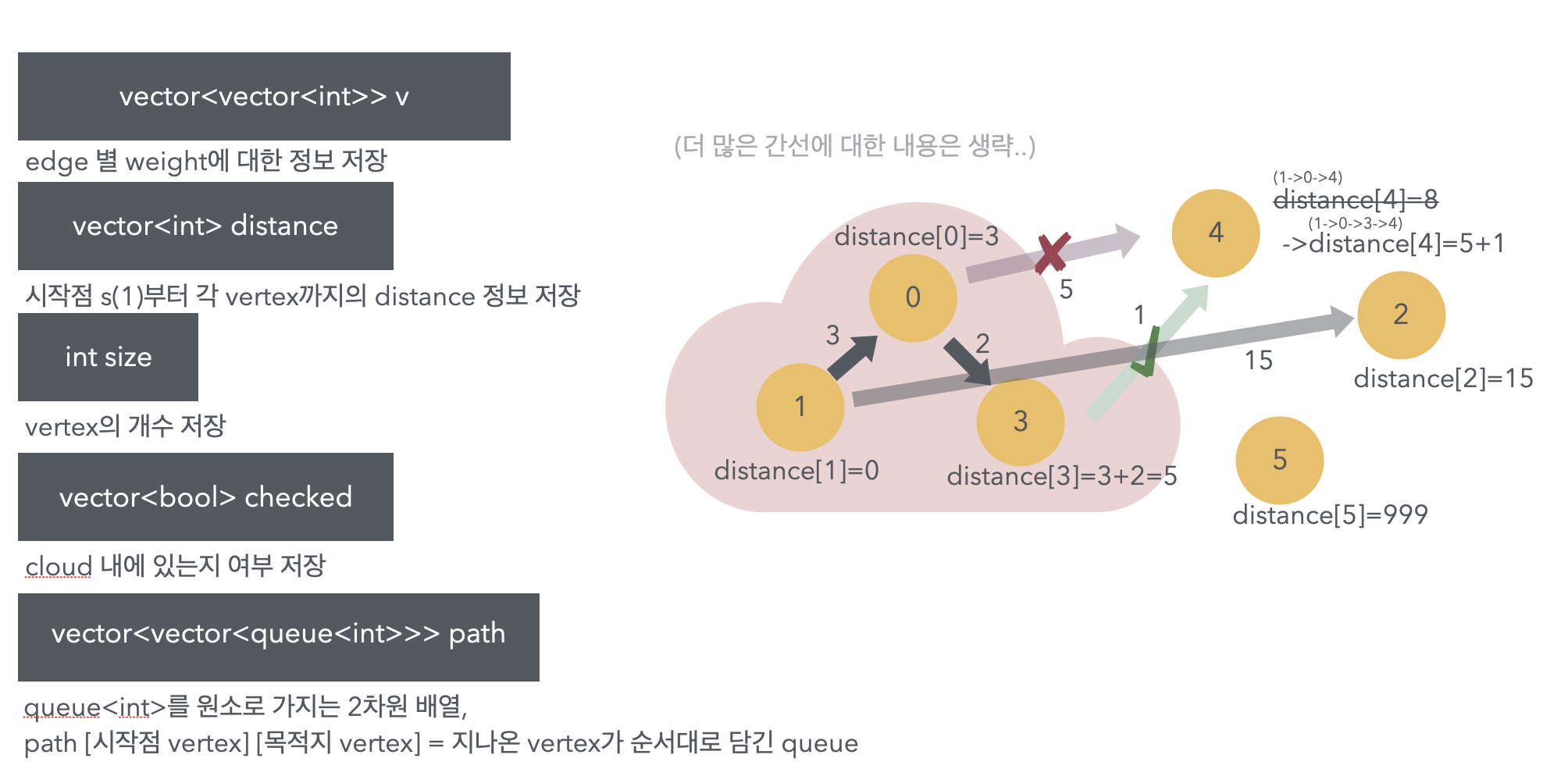
std::vector를 사용해checked[]과distance[]를 사용하여 (cloud에 새로 들어갈) 가장 가까운 정점을 그때마다 찾아주는 방식으로 구현하였다.
(O(n^2)의 시간복잡도를 보인다)- 각 정점 별 최단 경로를 저장하기 위해
vector<vector<queue<int>>> path를 사용하였다. queue를 통해 각 정점별 경로를 추가하고 출력할 수 있다.
Graph 클래스에서 사용한 field 변수들
vector<vector<int>> v;// weight 행렬
vector<int> distance;// 현재 vertex별 거리 배열
int size;// vertex 개수
vector<bool> checked;// vertex cloud 판별 배열
vector<vector<queue<int>>> path;// [시작점(size)][각 정점별(size)][경로]
Solution Visualization
Code
graph.h
#include <vector>
#include <queue>
using namespace std;
class Graph {
public :
void LoadMatrix(string& filename);
void PrintMatrix();
int GetSize();
void PrintShortestPathWeight(int s);
void PrintShortestPath(int s);
void FindPath(int s);
private :
vector<vector<int>> v; // weight 행렬
vector<int> distance; // 현재 vertex별 거리 배열
int size; // vertex 개수
vector<bool> checked; // vertex cloud 판별 배열
vector<vector<queue<int>>> path; // [시작점(size)][각 정점별(size)][경로]
};graph.cpp
#include "graph.h"
#include <fstream>
#include <string>
#include <iostream>
#include <vector>
#include <queue>
using namespace std;
void Graph::LoadMatrix(string &filename) {
ifstream file(filename);
file >> size;
v.resize(size, vector<int>(size));
distance.resize(size, 999); // 최단 거리를 999로 초기화
checked.resize(size, false); // 방문 여부를 false로 초기화
path.resize(size, vector<queue<int>>(size));
for (int i = 0; i < size; i++) {
for (int j = 0; j < size; j++) {
file >> v[i][j];
}
}
file.close();
}
void Graph::PrintMatrix() {
for(int i=0; i<size; i++){
for(int j=0; j<size; j++){
cout << v[i][j] << " ";
}
cout << endl;
}
}
int Graph::GetSize() {
return size;
}
void Graph::PrintShortestPathWeight(int s) {
FindPath(s);
// 모든 정점까지의 최단 경로의 가중치의 합을 출력
int sum = 0;
for(int i = 0; i < size; i++) {
sum += distance[i];
}
cout << sum;
}
void Graph::PrintShortestPath(int s) {
FindPath(s);
for(int i = 0; i < size; i++) {
queue<int> temp = path[s][i];
if(i!=s) {
cout << s << " ";
while (!temp.empty()) {
cout << temp.front() << " ";
temp.pop();
}
cout << endl;
}
}
}
void Graph::FindPath(int s){
distance[s] = 0; // 시작 정점까지의 거리를 0으로 설정
for(int count = 0; count < size - 1; count++) {
int minDistance = 999, minIndex;
// 아직 처리되지 않은 정점 중 최단 거리를 찾음
for(int i = 0; i < size; i++) {
if(!checked[i] && distance[i] <= minDistance) {
minDistance = distance[i];
minIndex = i;
}
}
checked[minIndex] = true;
// 최단 거리를 갱신하고 경로를 업데이트함
for(int i = 0; i < size; i++) {
if(!checked[i] && v[minIndex][i] != 999 && distance[minIndex] + v[minIndex][i] < distance[i]) {
distance[i] = distance[minIndex] + v[minIndex][i];
path[s][i] = path[s][minIndex]; // 경로 업데이트
path[s][i].push(i);
}
}
}
}