ROS2 기반의 라이다를 이용한 로컬라이제이션을 포스트하겠습니다!
여기서 참고한 깃허브는 다음과 같습니다.
워크 스페이스 생성 및 깃허브 클론
cd ~/ros2_ws/src
git clone --recursive https://github.com/rsasaki0109/lidarslam_ros2의존성 패키지 설치 및 빌드
cd ..
rosdep install --from-paths src --ignore-src -r -y
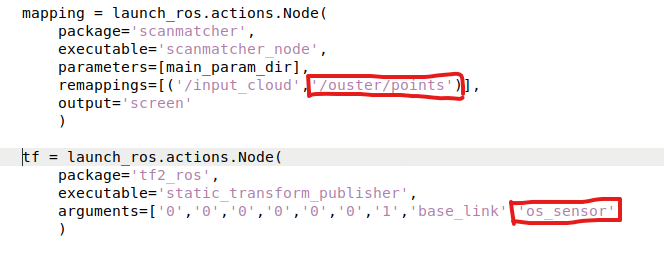
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Releaselidarslam.launch.py 열고 아래와 같이 수정. '/ouster/points/' 토픽 변경 및 'os_sensor' frame id 변경.
우선 전에 포스트 했던 ouster 라이다를 실행시켜 준 후, 다음 명령어를 통해 lidarslam을 실행시켜줍니다🧍.
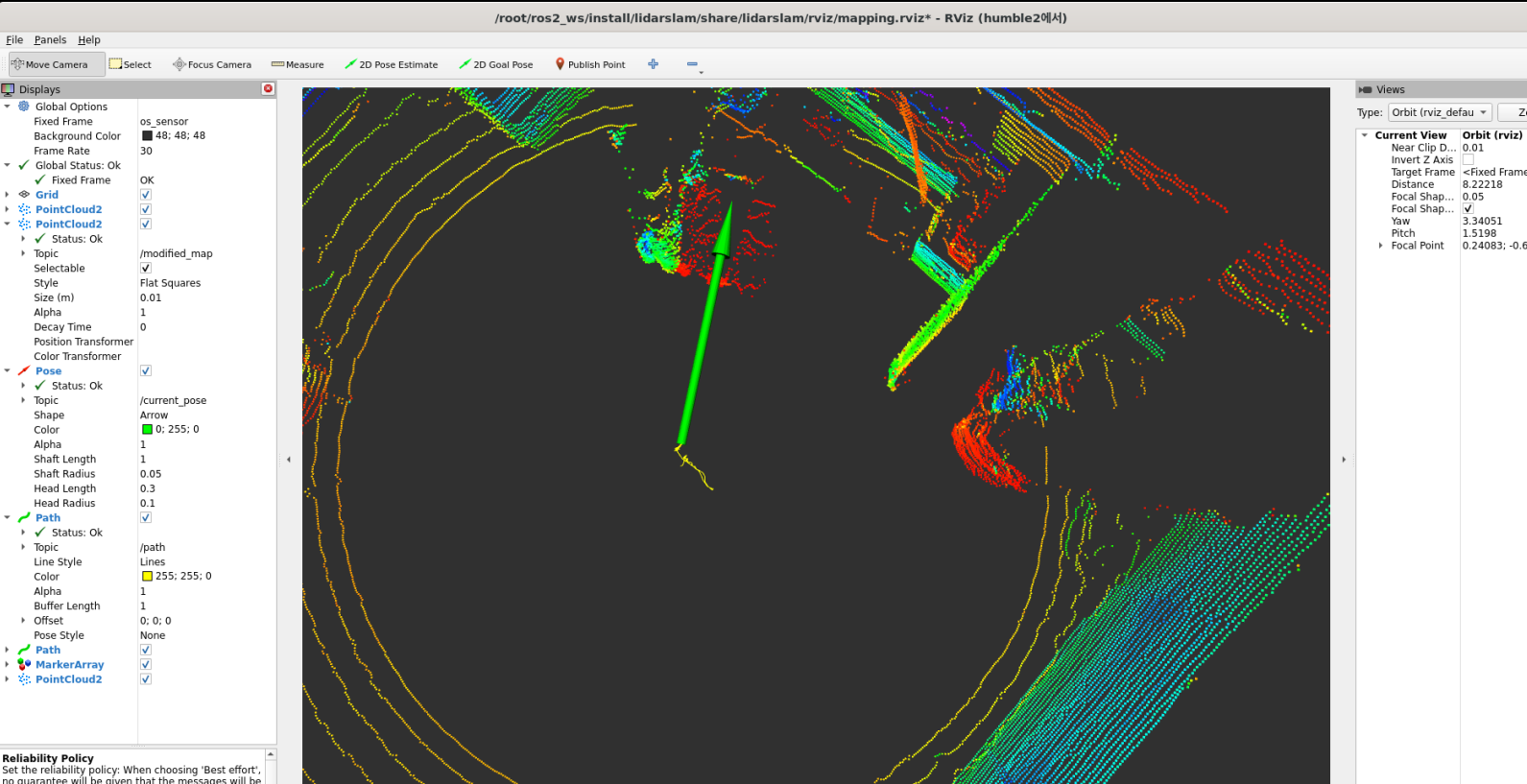
ros2 launch lidarslam lidarslam.launch.pyrviz가 열리고 다음과 같이 lidar 기반으로 위치추정을 하게 됩니다.
-- topic : /current_pose

결과값은 따로 없나요??