모든 이미지의 출처는 인프런 : 컴퓨터 비전 완벽 가이드 에 있으며, 공부 기록용으로 블로그를 작성하는 것입니다.
SSD
수행 속도와 성능이 이전보다 훨씬 좋아진 모델입니다.
- SSD의 주요 구성 요소 : Multi Scale Feature Layer + Anchor Box
Multi Scale Feature Layer
핵심
서로 다른 크기의 Feature Map들을 기반으로 Object Detection 수행하는 것.
Feature Map의 크기가 작을수록 더 큰 이미지를 찾을 수 있습니다.
anchor box를 활용하여 Object Detection
- anchor box와 겹치는 feature map 영역의 object 클래스 분류
- GT box 위치를 예측할 수 있도록 수정된 좌표
개별 anchor box가 갖고 있는 정보는
1. Detection하려는 object 유형의 softmax 값
2. 수정된 anchor box 좌표값
SSD Network
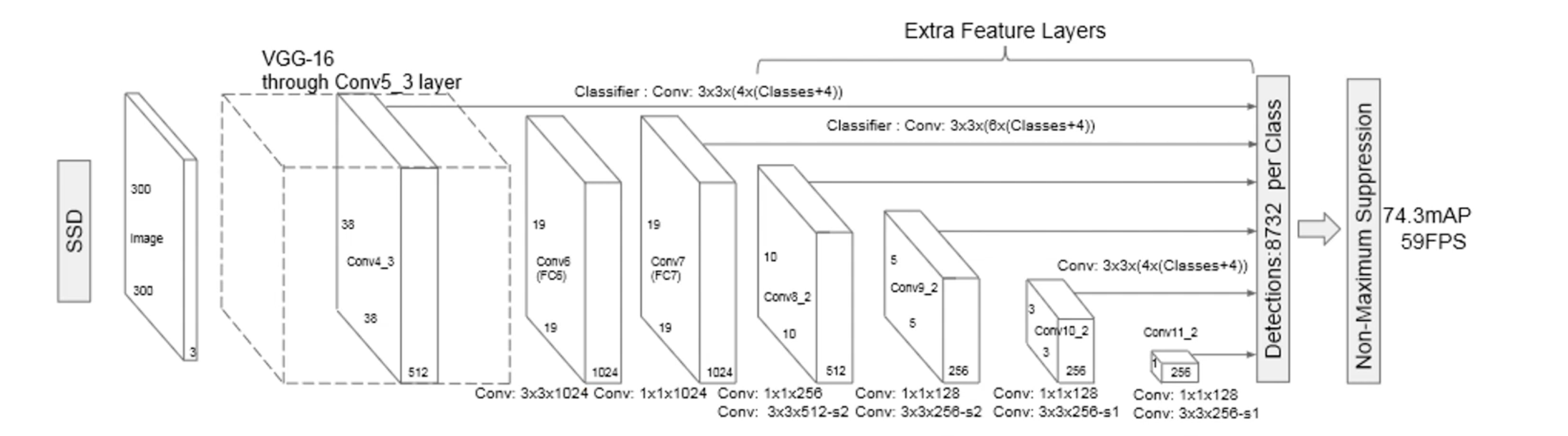
- 받는 원본 이미지 :
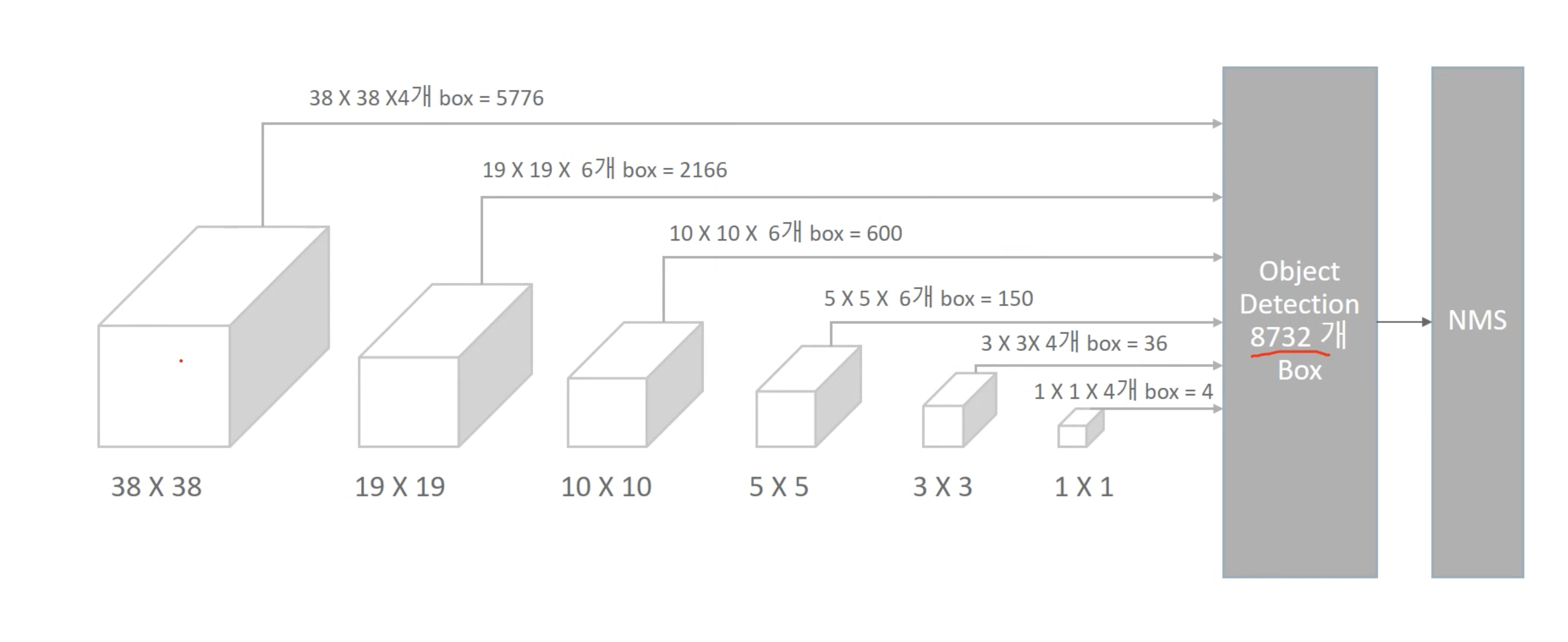
300X300 or 512X512 - 개별 셀의 anchor box 개수 :
4개 - anchor box가 가지고 있는 정보 :
Classes(객체 개수, pascal20이라고 하면 20 + 1(배경) ) + 4(좌표) - Feature map 별로 anchor box를 가지고 와서 Detections로 모아놓고, NMS를 통해 객체 인식 (아래 그림 참조)