로봇 모델 생성
- .urdf vs .sdf
- URDF (Unified Robot Description Format)
- 로봇 모델에 대해 기술할 때 사용- 링크, 관절, 센서 등 로봇의 구조를 정의하는 XML 기반 파일 형식
- 로봇 모델의 시각화를 생성하고 운동학 및 동적 시뮬리에션을 수행하는데 사용
- SDF (Simulation Description Format)
- Gazebo 시뮬레이터를 사용하는 로봇 시스템의 시뮬레이션에 사용되는 파일 형식- 질량, 관성 및 마찰과 같은 물리적 속성을 포함하여, URDF보다 포괄적인 표현을 제공하는 XML 기판 파일 형식
- SDF는 중력, 바람, 마찰 등 다양한 환경에서 로봇의 동작을 시뮬레이션 하는데 사용
실습
로봇 패키지 만들기
mkdir sim_ws
mkdir sim_ws/src
catkin_make
cd ~/sim_ws/src/
catkin_create_pkg robot_description rospy urdf xacro
mkdir -p robot_description/urdf
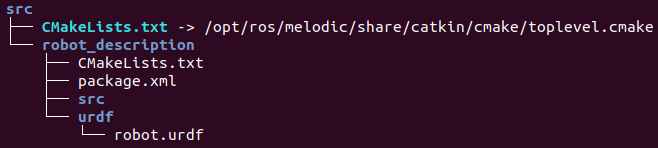
touch robot_description/urdf/robot.urdf여기까지 진행하고 나면 이렇게 파일과 폴더들이 생성된 것을 확인할 수 있다.
robot.urdf 파일에 아래 내용을 적어주자.
<?xml version="1.0" ?>
<robot name="robot">
<!-- Link - chassis -->
<link name="link_chassis">
<inertial>
<mass value="10" />
<origin xyz="0 0 0.3" rpy="0 0 0" />
<inertia ixx="1.5417" ixy="0" ixz="0" iyy="3.467" iyz="0" izz="4.742" />
</inertial>
<collision>
<geometry>
<box size="2 1.3 0.4" />
</geometry>
</collision>
<visual>
<geometry>
<box size="2 1.3 0.4" />
</geometry>
<material name="Red">
<color rgba="1 0 0 1" />
</material>
</visual>
</link>
</robot>- 설명
<--color rgba 는 red, green, blue, alpha(투명도)이다.--/>
실행을 위한 Launch file 만들기
cd ~/sim_ws/src/
mkdir -p robot_description/launch
touch robot_description/launch/rviz.launchrviz.launch 파일에 아래 내용을 적어주자.
<launch>
<param name="robot_description" command="cat '$(find robot_description)/urdf/robot.urdf'" />
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" />
</launch>rviz 실행해보기
roslaunch robot_description rviz.launch
아직은 아무것도 없는 RVIZ 창이 나올 것이다.
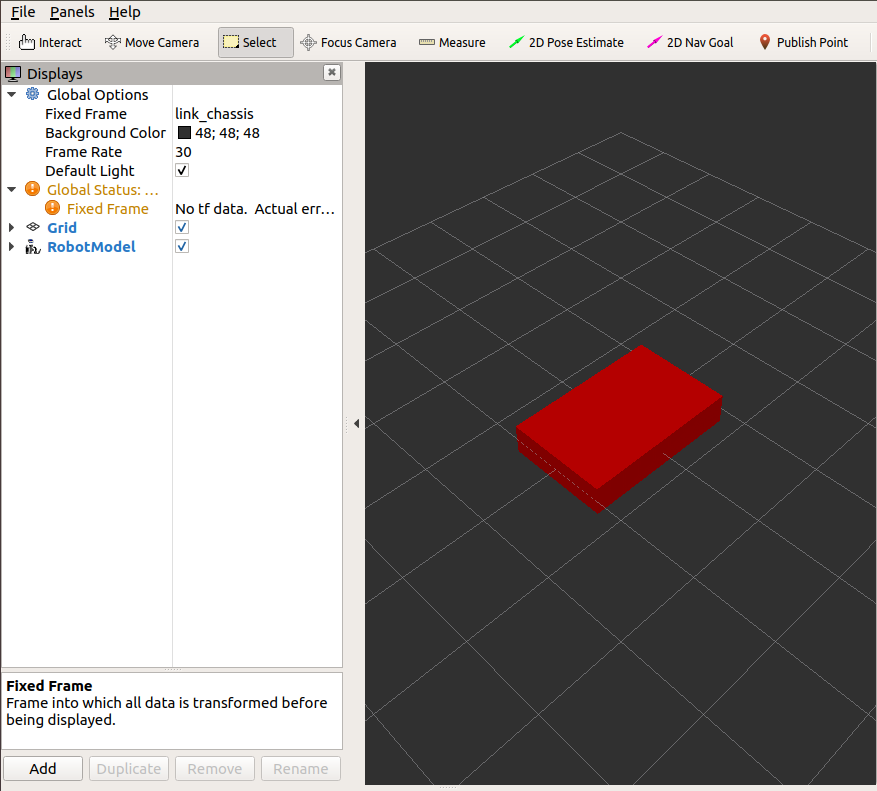
Rviz 내부의 창에서 하단에 있는 Add를 눌러 RobotModel을 추가해주고
Fixed Frame을 "link_chassis"로 바꿔주면 모델이 보이는 것을 확인할 수 있다.
- link_chassis는 robot.urdf에 적었던 link name이다.
RLException: [rviz.launch] is neither a launch file in package [robot_description] nor is [robot_description] a launch file name
The traceback for the exception was written to the log file혹시 이런 ERROR를 만난다면 아래 코드를 terminal에 한번 쳐주자
source ~/sim_ws/devel/setup.bashLink와 Joint
Link
Inertial
<intertial>
<mass value="10" />
<origin
xyz="0 0 0.3"
rpy="0 0 0" />
<inertia
ixx="1.5417"
ixy="0"
ixz="0"
iyy="3.467"
iyz="0"
izz="4.742"
</inertial>- mass : 물체의 무게, kg
- origin : 관성값의 무게중심
- inertia : 관성의 분포를 나타내는 matrix
Colision / Visual
<colision>
<geometry>
<box size="2 1.3 0.4" />
</geometry>
</colision>
<visual>
<geometry>
<box size="2 1.3 0.4" />
</geometry>
</visual>- colision : simulation상에서 물리적 상호작용 계산(실제 연산이 돌아가는 영역)
- visual : rendering에만 사용
Joint
- 링크들을 묶고 링크간의 위치 관계를 만드는데 사용
<joint name="joint_chassis_left_wheel" type="continuous">
<origin rpy="0 0 0" xyz="-0.5 0.65 0" />
<child link="link_left_wheel" />
<parent link="link_chassis" />
<axis rpy="0 0 0" xyz="0 1 0" />
<limit effort="10000" velocity="1000" />
<joint_properties damping="1.0" friction="1.0" />
</joint>실행하기
roslaunch robot_description rviz.launch만약 이런 ERROR를 만났다면
cannot launch node of type [joint_state_publisher_gui/joint_state_publisher_gui]: joint_state_publisher_guijoint_status_publusher_gui를 설치해주면 된다.
apt install ros-melodic-joint-status-publisher-gui
이때 ros version이 다르다면 melodic 대신 자신의 ros version을 적어주면된다.
ros version 확인하는 방법
rosversion -d