ML/DL
1.야구선수 연봉 예측 with keras

80년대 야구선수 최동원의 연봉을 10년대 기준으로 예측해 보자
2.다층 퍼셉트론
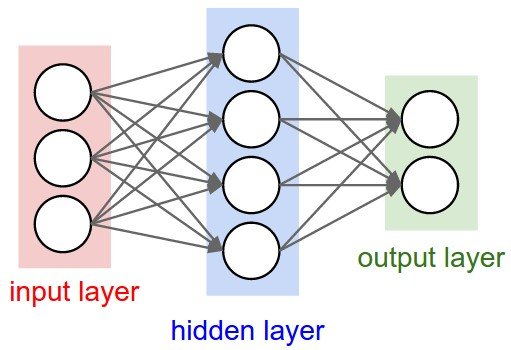
가장 기본적인 형태의 인공 신경망(Artificial Neural Network)하나의 입력층(input layer), 하나 이상의 은닉층(hidden layer), 하나의 출력층(output layer)로 구성Dense 레이어는 입출력을 모두 연결인공신경망 내부에서
3.YOLO 튜토리얼

참고자료: https://inside-machinelearning.com/en/yolov8-how-to-use/사용한 yolo 버전: YOLOv8to do: DeepSort 적용 (참고: https://github.com/MuhammadMoinFais
4.미디어파이프로 자세 인지 모델 만들기
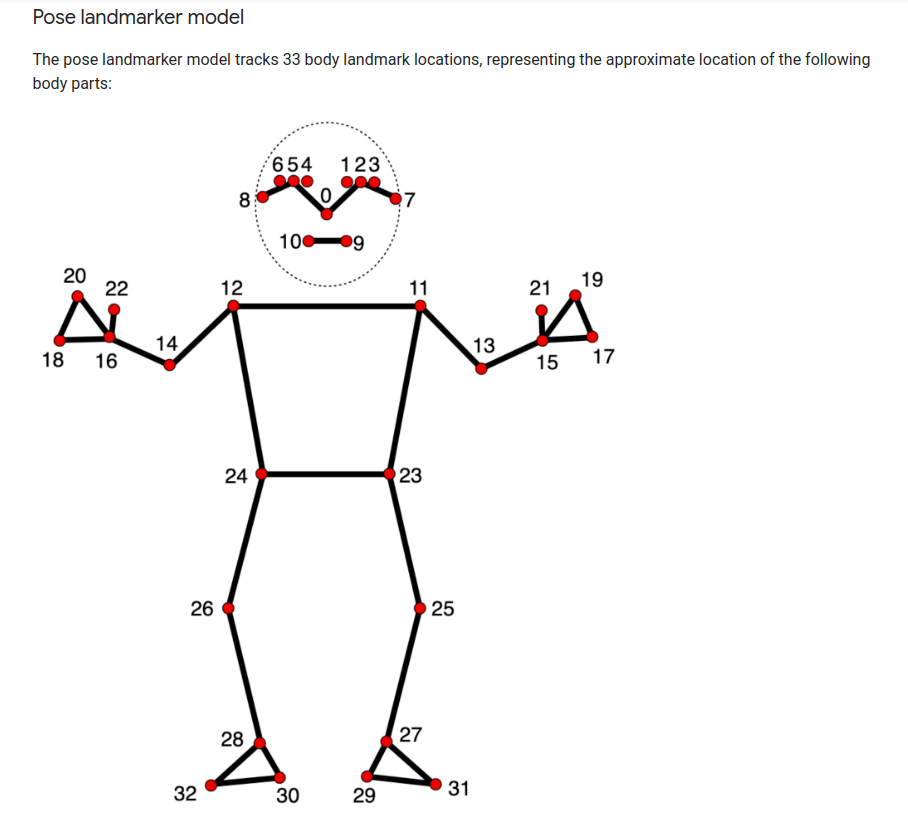
현재 촬영되고 있는 사람이 팔을 들었는지 내렸는지 알아보자
5.YOLO v3, v5, v8로 책상 위 쓰레기 알아보기
데이터 준비 영상 촬영 후 프레임 추출 Labeling & Augmentation: Roboflow data.yaml 클래스 커피컵 (쓰레기 아닌) 커피컵 (쓰레기 아닌) 쿠키 종이 플라스틱 티슈 비닐 yolo v3 베이스 모델: yolo
6.YOLO v8 설치기
로컬 환경:운영체제: Ubuntu 22.04Nvidia Cuda 버전: 12.0 --> 이놈이 매번 라이브러리 설치를 힘들게 한다.. 가급적 11.8 기준으로 설치해주는 것이 좋습니다YOLO v8 Python 라이브러리 설치무척 무척 간단해 보인다. 분명 전에도 여러
7.YOLO로 객체 인식해서 좌표 구하기(feat. DOBOT)

전에 시연 중인 로봇팔이 물건을 잘 못 집고 시늉만 하고 있어서, 카메라가 없나? 했는데, 실제로 해 보니 카메라로 객체는 잘 인식했더라도 좌표 계산을 잘못해서 집는 동작을 못하는 경우가 많았다.이동할 좌표는 어떻게 구해오는가?Aruco Marker 위치에서 로봇의 물
8.Vision Transformer 찍먹
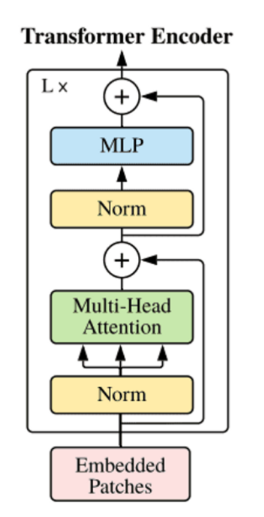
참고https://github.com/google-research/vision_transformerhttps://blog.naver.com/nueyet/222984347342코랩 실습 https://colab.research.google.co
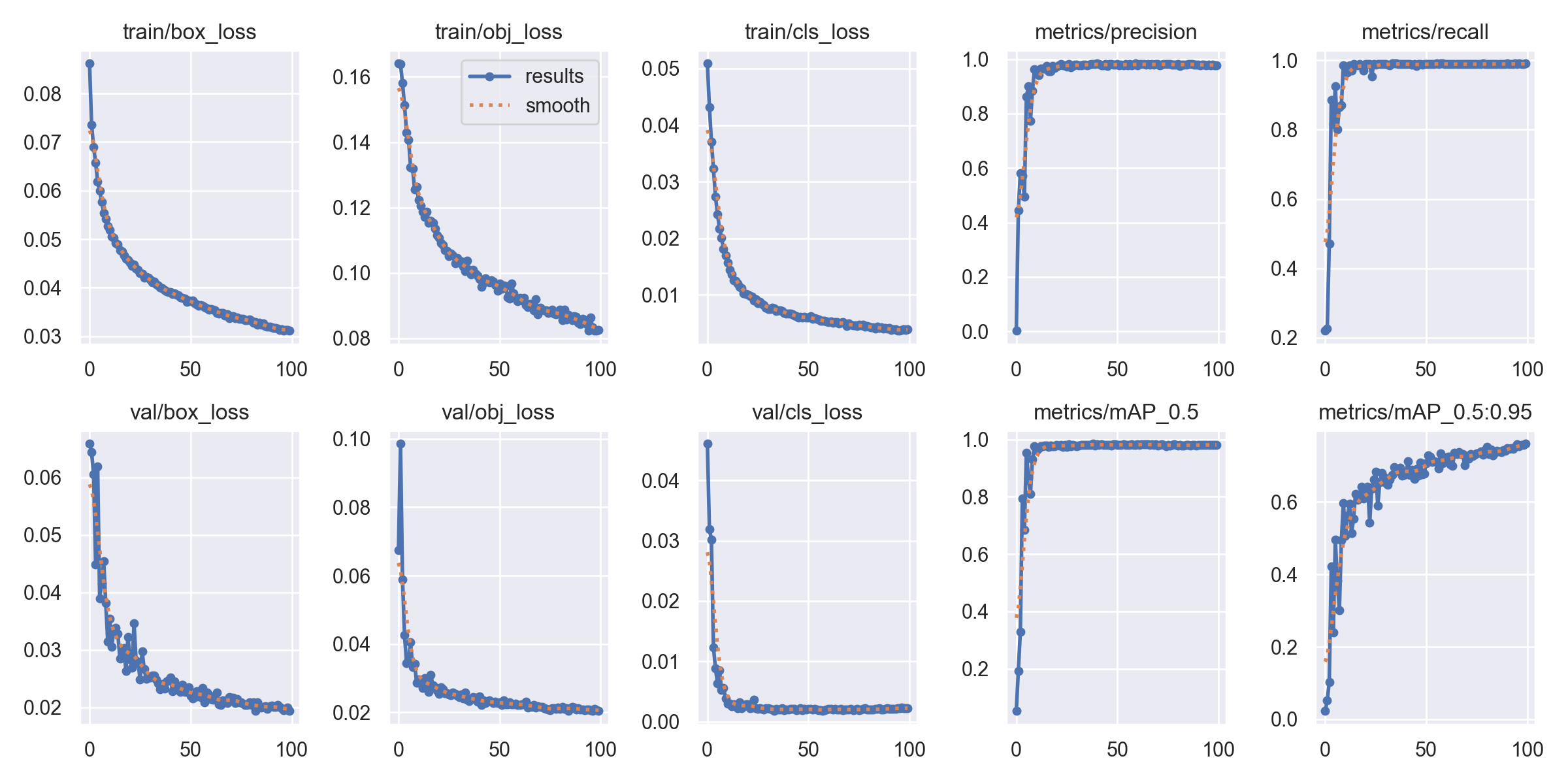
9.YOLO 버전 비교
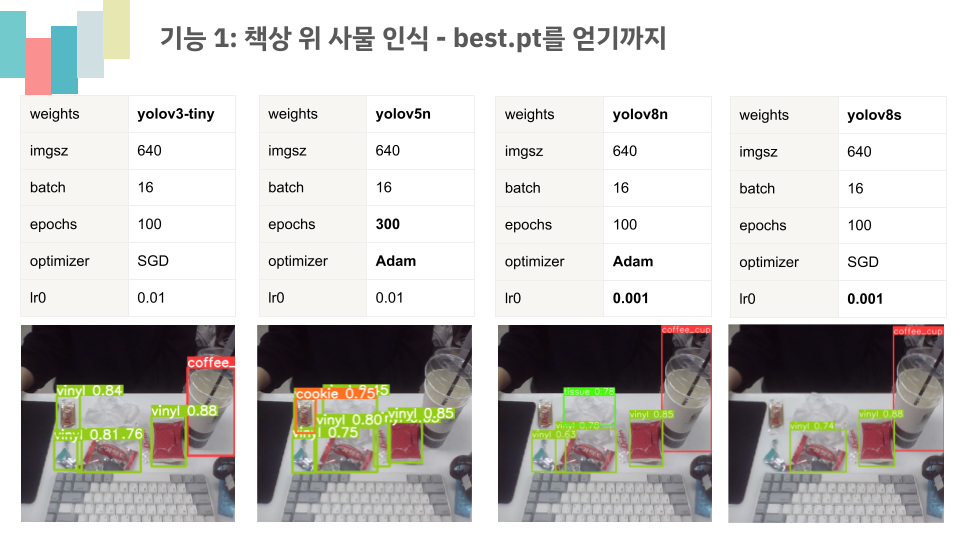
딥러닝 프로젝트(https://github.com/addinedu-ros-3rd/deeplearning-repo-4)에서 서로 다른 버전의 YOLO를 사용했고 그 중에 가장 성능이 좋았던 모델은 YOLOv5n으로 300회 학습한 모델이었다.근데 버전별로 뭐가