ROS를 다 깔아준 후 Turtlesim 패키지를 실행하기 위하여
$ sudo apt update
$ sudo apt install ros-foxy-turtlesim함수로 turtlesim 패키지를 설치해주었다.
이후
$ ros2 run turtlesim turtlesim_node
$ ros2 run turtlesim turtle-teleop_key를 입력해주었다
오류발생
ros2: command not found
라는 오류가 발생!!
=>
cd /opt/ros/foxy/해당 폴더에서 ls 로 파일들을 확인하여볼 때 파일들이 나온다면 ros2가 깔리긴 한 것임
근데 설치를 안해주어서 인식을 못하는 것!
해당 /opt/ros/foxy/ 폴더에서
$ source setup.bash명령어를 통해 ros2를 설치해준 후 다시 위 명령어들을 실행하면
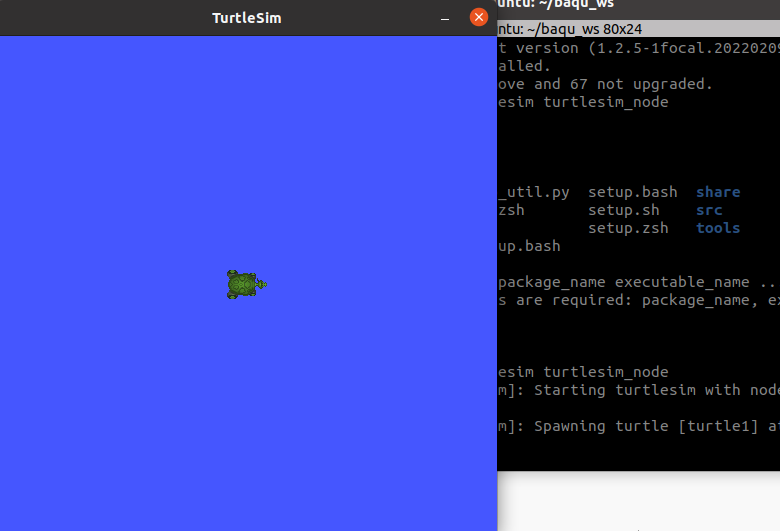
잘 실행이 된다
그래프로 노드와 토픽 등 확인
rqt_graph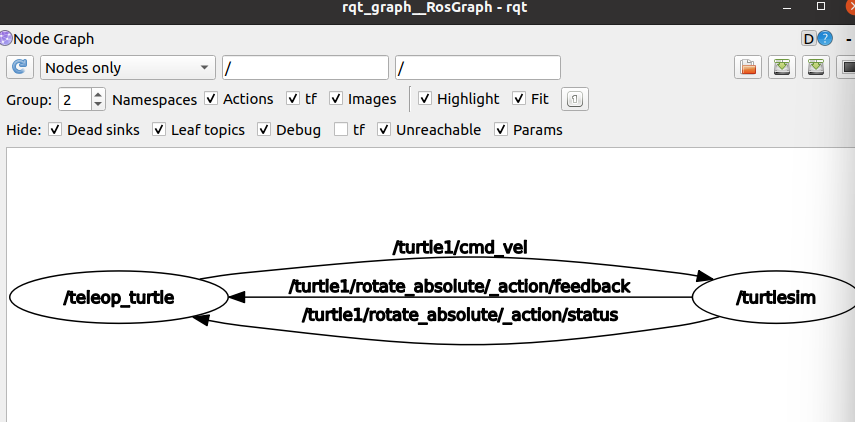
rqt_grpah로 실행시켰을 때 노드들이 한 번에 출력되지 않음.. 걍 빈 화면 출력됨
왜 그러는지는 모르겠는데 왼쪽 위에 새로고침 누르면 출력됨
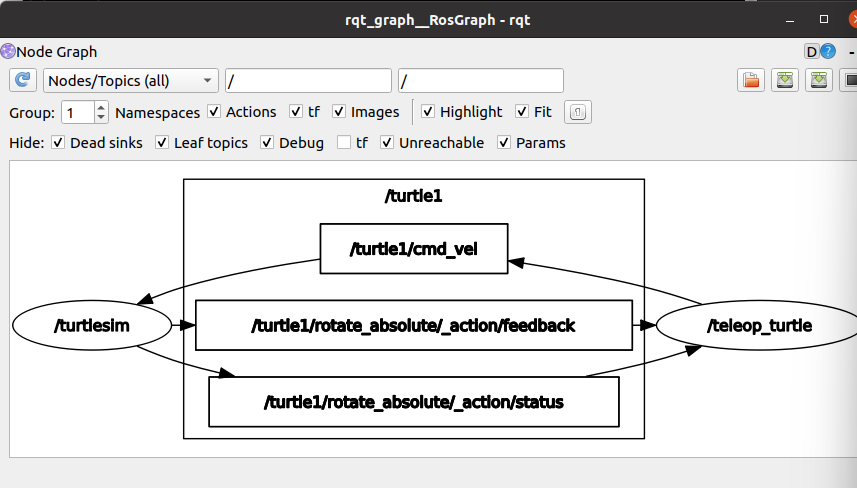
새로고침 옆에 Nodes/Topics(all) 해주면 토픽들 뿐만 아니라 액션 등까지 다 표시해줌

Web-Front / SW-AI 개발자