Bibtex 인용
@INPROCEEDINGS{9341176,
author={Shan, Tixiao and Englot, Brendan and Meyers, Drew and Wang, Wei and Ratti, Carlo and Rus, Daniela},
booktitle={2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title={LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping},
year={2020},
volume={},
number={},
pages={5135-5142},
doi={10.1109/IROS45743.2020.9341176}}요약
- smoothing 및 mapping을 활용한 tightly coupled lidat inertial odometry 프레임 워크 제안
- factor graph기반 LIO 구성
- IMU preintegration 기반 lidat point cloud deskewing 및 초기 추정
- odometry 기반 IMU dias 추정
- marginalization 기반 포즈 최적화를 통한 실시간 성능 향상
- keyframe selection and sliding window를 활용한 sub keyframe을 통한 성능 향상
인트로
- 비전 기반 SLAM은 장소인식에 유리하지만 initialization, range등이 별로
- 라이다 기반은 조도 변화에도 불변성 유지가능, fine detail of environment 취득 가능
- LOAM이 대표적인데 low-drift, 실시간 pose estimation, mapping제공하지만 voxel map기반이라 loop closing, gps 융합 등에 별로
- 그리고 LOAM 은 실시간 성능도 구리고 스캔매칭 기반이라 large scale에서 구리다
- smoothing and mapping기반 tightly coupled LIO제안
- nonlinear 운동 모델 기반 포인트클라우드 deskew
- imu를 통해 라이다 스캐닝 동안의 센서 운동 추정 및 최적화의 초기값으로 활용
- 라이다 오도메트리 IMU bias 추정에 활용
- global factor graph를 활용해 traj 추정
- 라이다 imu융하
- pose간 place recognition 통합
- gps, heading등 absolute value활용 가능
- 여러 factor joint optimzation
- prior sub keyframe을 통한 pose 최적화
- local scan matching → 실시간 good
기여
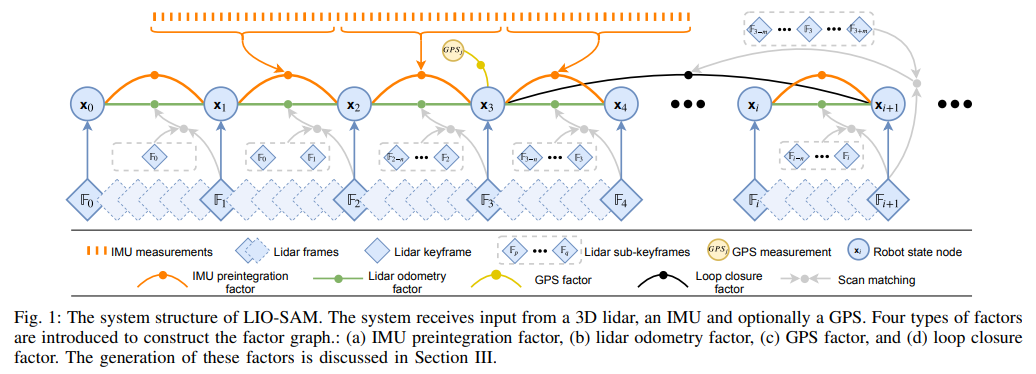
- factor graph기반 tightly coupled LIO 구축
- local sliding window based scan matching을 통한 실시간 성능 확보
III. LIDAR INERTIAL ODOMETRY VIA SMOOTHING AND MAPPING
A. System Overview
- 로봇 상태
- 회전 행렬
- 위치 벡터
- IMU bias
- 3d 라이다, imu, gps 를 입력으로 사용
- 센서 관측값을 바탕으로 로봇 pose and traj 추정
- 상태 추정 문제를 MAP 문제로 정식화
- factor graph사용
- 가우시안 노이즈 가정, MAP 추론은 non linear least square 문제랑 같음
- factor graph
- state variable
- IMU pre integration
- Lidar odometry
- GPS
- loop closure
- 새로운 node 추가 조건은 pose 변화량기반
- graph 최적화는 bayes tree기반 incrtemental smoothing and mapping 사용 (iSAM2)
B. IMU Preintegration Factor
- IMU measurement
- IMU raw data
- IMU bias
- white noise
- 월드 좌표계에서 바디기준으로 변환하는 행렬
- motion update
- IMU preintegration
- IMU bias는 factor graph에서 lidar odometry factor랑 같이 최적화
C. Lidar Odometry Factor
- feature extraction
- edge plane 추출
- key frame selection
- pose 변화가 초과 시 → 메모리 절약 연산 최적화
- sub key frame selection based on sliding window
- sub keyframe 기반 voxel 맵 구성
- 엣지는 0.2미터 해상도 평면은 0.4미터 해상도로
- sub keyframe 기반 voxel 맵 구성
- SCAN MATCHING
- IMU 예측 모션 기반 초기값 적용
- feature랑 voxel맵 대응 매칭 수행
- relative transformation
- 엣지랑 평면 feature간 거리 계싼 기반
- 그냥 엣지에 대해서 직선 거리 계산하는거임
- 이건 그냥 평면 사이 거리 계산하는거임
- 가우스 뉴턴 방식으로 최적 변환 도출
- 초기 추정값을 가지고 시작해서 오차함수(앞에서 구한 엣지 차이 평면 차이들로 정의됨)을 활용해서 그 차이를 최소화 하는 변환 행렬 구하는거
- 최종적으로 LO factor 계산
- 엣지랑 평면 feature간 거리 계싼 기반
D. GPS Factor
- GPS측정값은 local cartesian coordinate로 변환, 새로운 node 추가시에 해당 팩터 같이 넣음
- 보정 조건
- 라이다 프레임이랑 gps 동기화 안되면 gps를 라이타 프레임 타임스탬프에 맞춰서 선형 보간
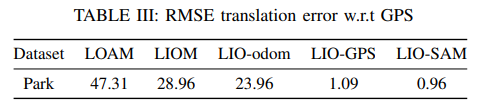
- LO 공분산이 GPS 공분산보다 클 경우에만 GPS factor추가 → 항상 추가하는거 아님
E. Loop Closure Factor
- factor graph활용으로 loop closing 통합 잘됨
- euclidean distance기반으로 loop detection을 수행함 → 다른 방법 써도된대 ex descriptor
- 15m보다 가까우면 loop closing수행
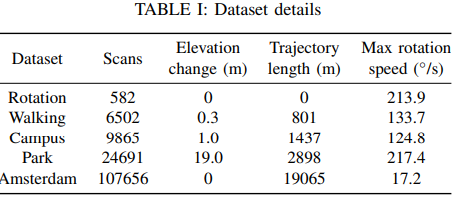
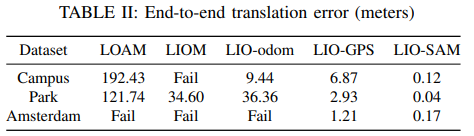
IV. EXPERIMENTS
- 직접 딴 데이터 사용해서 테스트해보니까 잘됨이라는데
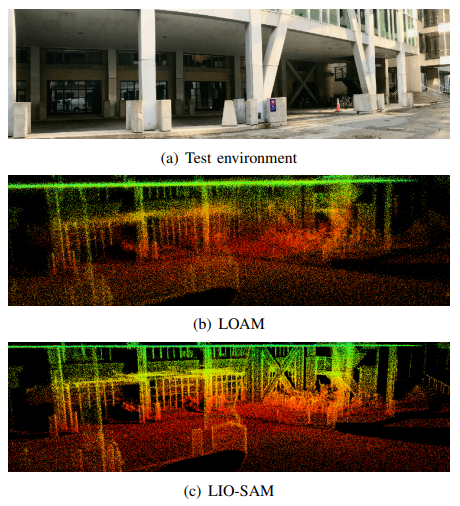
- 이런거로도 해봤는데 나 잘됨 ㅇㅇ
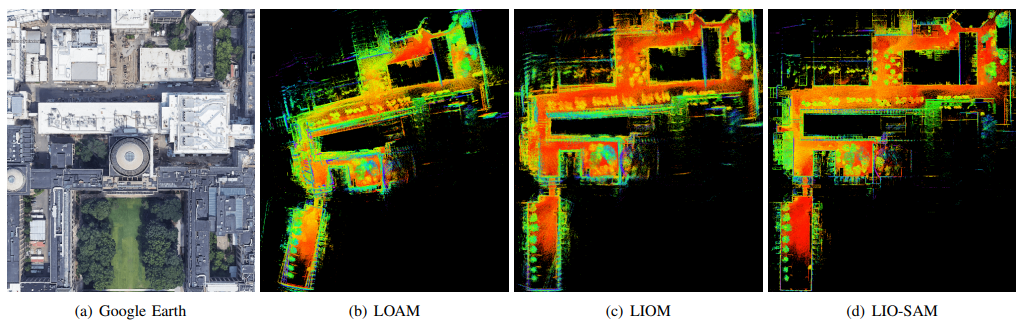
- ㅇㅇ 잘된대
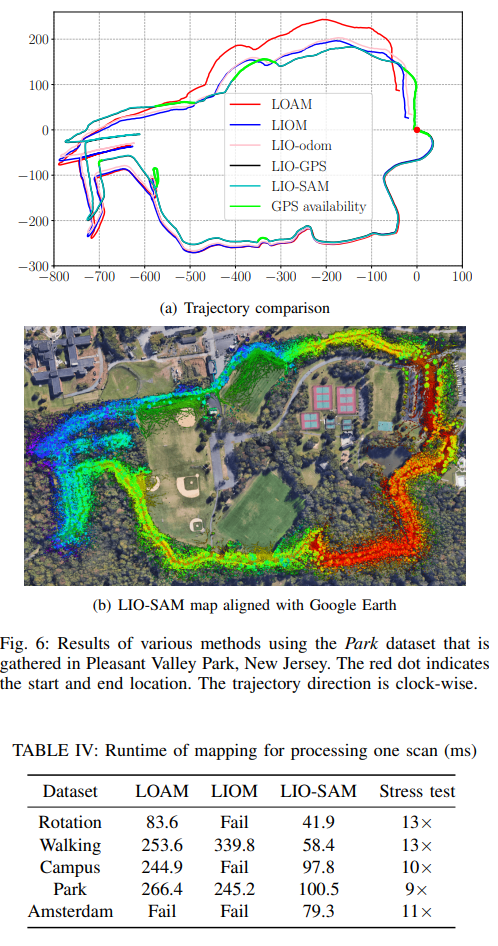
- 근데 잘된다는거 치고 모든 데이터셋에 대해서 동일한 메트릭으로 뽑은 결과치는 안줌

Studying