배경
사용자 정의 메시지 인터페이스를 만들어보았으니 인터페이스를 만들어 보자.
현재 환경에서 인터페이스는 CMake 패키지를 통해서만 구현할 수 있다. 그러나 CMake 패키지에 Python 노드나 라이브러리가 존재할 수 있다.
작업
1. 패키지 생성
워크 스페이스의 src 디렉터리에서 more_interfaces 패키지를 생성하자.
ros2 pkg create --build-type ament_cmake more_interfaces
mkdir more_interfaces/msg2. 메시지 파일 생성
more_interfaces/msg에서 AddressBook.msg 파일을 생성하자. 메시지 파일은 다음의 코드로 구성된다.
bool FEMALE=true
bool MALE=false
string first_name
string last_name
bool gender
uint8 age
string address메시지는 다음과 같은 필드로 구성된다.
first_name:stringlast_name:stringgender:boolage:uint8address:string
FEMALE 또는 MALE과 같이 디폴트 값을 설정할 수 있다.
2.1 메시지 파일 빌드
package.xml 파일에 다음을 추가한다.
<buildtool_depend>rosidl_default_generators</buildtool_depend>
<exec_depend>rosidl_default_runtime</exec_depend>
<member_of_group>rosidl_interface_packages</member_of_group>CMakeLists.txt에도 마찬가지로 다음을 추가한다.
find_package(rosidl_default_generators REQUIRED)생성하고 싶은 메시지를 다음과 같이 정의할 수 있다.
set(msg_files
"msg/AddressBook.msg"
).msg 파일을 직접 추가함으로써, CMake는 별도의 .msg 파일을 추가한 후 프로젝트를 재구성해야 함을 알고 있다.
다음과 같이 메시지를 생성한다.
rosidl_generate_interfaces(${PROJECT_NAME}
${msg_files}
)메시지의 런타임 종속성을 위해 다음을 추가한다.
ament_export_dependencies(rosidl_default_runtime)메시지의 소스 파일을 생성할 수 있는 준비가 되었다.
참고로 다음과 같이 여러 개의 인터페이스를 추가할 수 있다.
set(msg_files "msg/Message1.msg" "msg/Message2.msg" # etc ) set(srv_files "srv/Service1.srv" "srv/Service2.srv" # etc )rosidl_generate_interfaces(${PROJECT_NAME} ${msg_files} ${srv_files} )
3. 패키지 인터페이스 사용
위에서 생성하려는 메시지를 사용하는 코드를 작성해 보자.
more_interfaces/src에 아래의 코드로 된 publish_address_book.cpp파일을 작성하자.
#include <chrono>
#include <memory>
#include "rclcpp/rclcpp.hpp"
#include "more_interfaces/msg/address_book.hpp"
using namespace std::chrono_literals;
class AddressBookPublisher : public rclcpp::Node
{
public:
AddressBookPublisher()
: Node("address_book_publisher")
{
address_book_publisher_ =
this->create_publisher<more_interfaces::msg::AddressBook>("address_book", 10);
auto publish_msg = [this]() -> void {
auto message = more_interfaces::msg::AddressBook();
message.first_name = "John";
message.last_name = "Doe";
message.age = 30;
message.gender = message.MALE;
message.address = "unknown";
std::cout << "Publishing Contact\nFirst:" << message.first_name <<
" Last:" << message.last_name << std::endl;
this->address_book_publisher_->publish(message);
};
timer_ = this->create_wall_timer(1s, publish_msg);
}
private:
rclcpp::Publisher<more_interfaces::msg::AddressBook>::SharedPtr address_book_publisher_;
rclcpp::TimerBase::SharedPtr timer_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<AddressBookPublisher>());
rclcpp::shutdown();
return 0;
}3.2 퍼블리셔 빌드
CMakeLists.txt에 노드의 타깃을 추가한다.
find_package(rclcpp REQUIRED)
add_executable(publish_address_book
src/publish_address_book.cpp
)
ament_target_dependencies(publish_address_book
"rclcpp"
)
install(TARGETS publish_address_book
DESTINATION lib/${PROJECT_NAME})3.3 인터페이스 링크
동일한 패키지에서 생성된 메시지를 사용하기 위해 CMakeLists.txt에 다음을 추가한다.
rosidl_target_interfaces(publish_address_book
${PROJECT_NAME} "rosidl_typesupport_cpp")4. 빌드 및 테스트
워크 스페이스의 루트로 이동한 후 colcon으로 빌드를 수행한다.
cd ~/ros2_ws
colcon build --packages-up-to more_interfaces이후 퍼블리셔 노드를 실행한다.
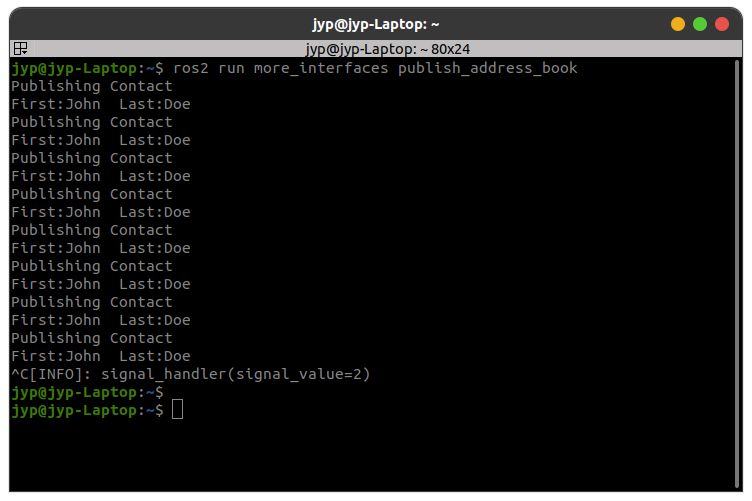
. install/local_setup.bash
ros2 run more_interfaces publish_address_book이후 해당 터미널에서 cpp파일에 설정한 값들로 퍼블리시 되는 것을 알 수 있다.
다른 터미널을 열어 echo를 통해 메시지를 수신해 보자.
. install/setup.bash
ros2 topic echo /address_book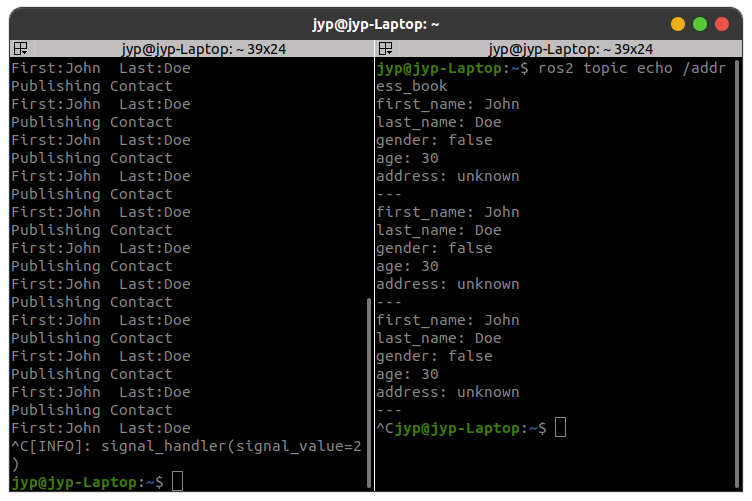
참고