배경
이전에는 메시지를 이용한 퍼블리셔/서브스크라이버 노드와 서버/클라이언트 노드를 작성해 보았으니, 이번엔 메시지 인터페이스를 직접 만들어보자.
작업
1. 새 패키지 생성
이번에는 msg인터페이스와 srv인터페이스를 각각의 패키지로 담아 만들어 볼 것이다.
dev_ws를 계속해서 사용한다.
dev_ws/src에서 패키지를 생성하자.
ros2 pkg create --build-type ament_cmake tutorial_interfacesCMake 패키지임에 주목하자.
현재 환경을 기준으로 순수한 Python 패키지에서
.msg또는.srv를 생성하는 방법은 없다.CMake 패키지에서 인터페이스를 생성한 후 Python 노드를 사용해야 한다.
dev_ws/src/tutorial_interfaces에서 다음 디렉터리를 생성하자.
mkdir msg
mkdir srv2. 사용자 정의 인터페이스 생성
2.1 msg 인터페이스
tutorial_interfaces/msg디렉터리에 Num.msg 파일을 생성하고 다음을 입력한다.
int64 num2.2 srv 인터페이스
이번엔 tutorial_interfaces/srv디렉터리에 AddThreeInts.srv 파일을 생성하고 다음을 입력하자.
int64 a
int64 b
int64 c
---
int64 sum3. CMakeLists.txt
사용자 정의 인터페이스를 언어별 코드로 변환하려면 CMakeLists.txt에 다음을 추가하자.
find_package(rosidl_default_generators REQUIRED)
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/Num.msg"
"srv/AddThreeInts.srv"
)라이브러리 이름은 반드시
${PROJECT_NAME}과 일치해야 한다.https://github.com/ros2/rosidl/issues/441#issuecomment-591025515
4. package.xml
사용자 정의 인터페이스는 언어별 코드 생성 시 rosidl_default_generators에 의존하기 때문에, package.xml에 의존성을 추가해야 한다.
<exec_depend> 태그는 런타임 또는 실행 단계에서의 의존성을 추가하는 데 사용한다.
rodidl_interfaces_packages는 <member_of_group> 태그로 선언된 의존성 그룹이다.
<build_depend>rosidl_default_generators</build_depend>
<exec_depend>rosidl_default_runtime</exec_depend>
<member_of_group>rosidl_interface_packages</member_of_group>5. 패키지 빌드
워크스페이스의 루트 디렉터리로 이동한 후 빌드 한다.
colcon build --packages-select tutorial_interfaces6. 사용자 정의 인터페이스 확인
새 터미널에서 환경을 소싱 한 후, 다음 명령어를 통해 인터페이스를 확인할 수 있다.
. install/setup.bashros2 interface show tutorial_interfaces/msg/Numint64 numros2 interface show tutorial_interfaces/srv/AddThreeIntsint64 a
int64 b
int64 c
---
int64 sum7. 인터페이스 테스트
7.1 퍼블리셔 노드와 서브스크라이버 노드로 Num.msg 테스트
이전에 사용한 퍼블리셔 노드와 서브스크라이버 노드를 수정하자.
퍼블리셔 노드의 코드를 다음과 같이 수정한다.
#include <chrono>
#include <memory>
#include "rclcpp/rclcpp.hpp"
#include "tutorial_interfaces/msg/num.hpp" // CHANGE
using namespace std::chrono_literals;
class MinimalPublisher : public rclcpp::Node
{
public:
MinimalPublisher()
: Node("minimal_publisher"), count_(0)
{
publisher_ = this->create_publisher<tutorial_interfaces::msg::Num>("topic", 10); // CHANGE
timer_ = this->create_wall_timer(
500ms, std::bind(&MinimalPublisher::timer_callback, this));
}
private:
void timer_callback()
{
auto message = tutorial_interfaces::msg::Num(); // CHANGE
message.num = this->count_++; // CHANGE
RCLCPP_INFO(this->get_logger(), "Publishing: '%d'", message.num); // CHANGE
publisher_->publish(message);
}
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<tutorial_interfaces::msg::Num>::SharedPtr publisher_; // CHANGE
size_t count_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MinimalPublisher>());
rclcpp::shutdown();
return 0;
}서브스크라이버 노드의 코드를 다음과 같이 수정한다.
#include <memory>
#include "rclcpp/rclcpp.hpp"
#include "tutorial_interfaces/msg/num.hpp" // CHANGE
using std::placeholders::_1;
class MinimalSubscriber : public rclcpp::Node
{
public:
MinimalSubscriber()
: Node("minimal_subscriber")
{
subscription_ = this->create_subscription<tutorial_interfaces::msg::Num>( // CHANGE
"topic", 10, std::bind(&MinimalSubscriber::topic_callback, this, _1));
}
private:
void topic_callback(const tutorial_interfaces::msg::Num::SharedPtr msg) const // CHANGE
{
RCLCPP_INFO(this->get_logger(), "I heard: '%d'", msg->num); // CHANGE
}
rclcpp::Subscription<tutorial_interfaces::msg::Num>::SharedPtr subscription_; // CHANGE
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MinimalSubscriber>());
rclcpp::shutdown();
return 0;
}CMakeLists.txt 코드를 다음과 같이 수정한다.
#...
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(tutorial_interfaces REQUIRED) # CHANGE
add_executable(talker src/publisher_member_function.cpp)
ament_target_dependencies(talker rclcpp tutorial_interfaces) # CHANGE
add_executable(listener src/subscriber_member_function.cpp)
ament_target_dependencies(listener rclcpp tutorial_interfaces) # CHANGE
install(TARGETS
talker
listener
DESTINATION lib/${PROJECT_NAME})
ament_package()package.xml에 다음을 추가한다.
<depend>tutorial_interfaces</depend>빌드를 다시 수행하자.
colcon build --packages-select cpp_pubsub이후 cpp_pubsub의 talker와 listener를 다시 실행하자.
ros2 run cpp_pubsub talkerros2 run cpp_pubsub listener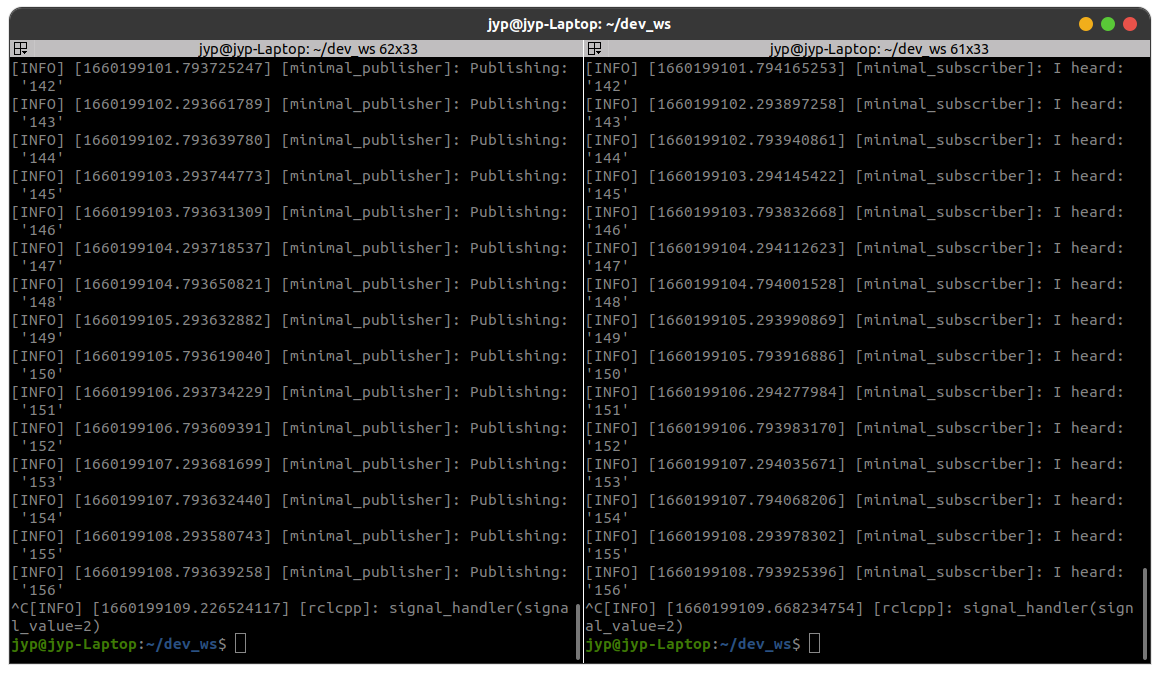
7.2 서버 노드와 클라이언트 노드로 AddThreeInts.srv 테스트
이전에 사용한 서버 노드와 클라이언트 노드를 수정하자.
서버 노드를 다음과 같이 수정한다.
#include "rclcpp/rclcpp.hpp"
#include "tutorial_interfaces/srv/add_three_ints.hpp" // CHANGE
#include <memory>
void add(const std::shared_ptr<tutorial_interfaces::srv::AddThreeInts::Request> request, // CHANGE
std::shared_ptr<tutorial_interfaces::srv::AddThreeInts::Response> response) // CHANGE
{
response->sum = request->a + request->b + request->c; // CHANGE
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Incoming request\na: %ld" " b: %ld" " c: %ld", // CHANGE
request->a, request->b, request->c); // CHANGE
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "sending back response: [%ld]", (long int)response->sum);
}
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
std::shared_ptr<rclcpp::Node> node = rclcpp::Node::make_shared("add_three_ints_server"); // CHANGE
rclcpp::Service<tutorial_interfaces::srv::AddThreeInts>::SharedPtr service = // CHANGE
node->create_service<tutorial_interfaces::srv::AddThreeInts>("add_three_ints", &add); // CHANGE
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Ready to add three ints."); // CHANGE
rclcpp::spin(node);
rclcpp::shutdown();
}클라이언트 노드를 다음과 같이 수정한다.
#include "rclcpp/rclcpp.hpp"
#include "tutorial_interfaces/srv/add_three_ints.hpp" // CHANGE
#include <chrono>
#include <cstdlib>
#include <memory>
using namespace std::chrono_literals;
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
if (argc != 4) { // CHANGE
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "usage: add_three_ints_client X Y Z"); // CHANGE
return 1;
}
std::shared_ptr<rclcpp::Node> node = rclcpp::Node::make_shared("add_three_ints_client"); // CHANGE
rclcpp::Client<tutorial_interfaces::srv::AddThreeInts>::SharedPtr client = // CHANGE
node->create_client<tutorial_interfaces::srv::AddThreeInts>("add_three_ints"); // CHANGE
auto request = std::make_shared<tutorial_interfaces::srv::AddThreeInts::Request>(); // CHANGE
request->a = atoll(argv[1]);
request->b = atoll(argv[2]);
request->c = atoll(argv[3]); // CHANGE
while (!client->wait_for_service(1s)) {
if (!rclcpp::ok()) {
RCLCPP_ERROR(rclcpp::get_logger("rclcpp"), "Interrupted while waiting for the service. Exiting.");
return 0;
}
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "service not available, waiting again...");
}
auto result = client->async_send_request(request);
// Wait for the result.
if (rclcpp::spin_until_future_complete(node, result) ==
rclcpp::executor::FutureReturnCode::SUCCESS)
{
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Sum: %ld", result.get()->sum);
} else {
RCLCPP_ERROR(rclcpp::get_logger("rclcpp"), "Failed to call service add_three_ints"); // CHANGE
}
rclcpp::shutdown();
return 0;
}CMakeLists.txt를 다음과 같이 수정한다.
#...
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(tutorial_interfaces REQUIRED) # CHANGE
add_executable(server src/add_two_ints_server.cpp)
ament_target_dependencies(server
rclcpp tutorial_interfaces) #CHANGE
add_executable(client src/add_two_ints_client.cpp)
ament_target_dependencies(client
rclcpp tutorial_interfaces) #CHANGE
install(TARGETS
server
client
DESTINATION lib/${PROJECT_NAME})
ament_package()package.xml에 다음을 추가한다.
<depend>tutorial_interfaces</depend>이후 빌드를 다시 수행한다.
colcon build --packages-select cpp_srvcli이후 cpp_srvcli의 server와 client를 실행하자.
. install/setup.bash
ros2 run cpp_srvcli server. install/setup.bash
ros2 run cpp_srvcli client 1 2 3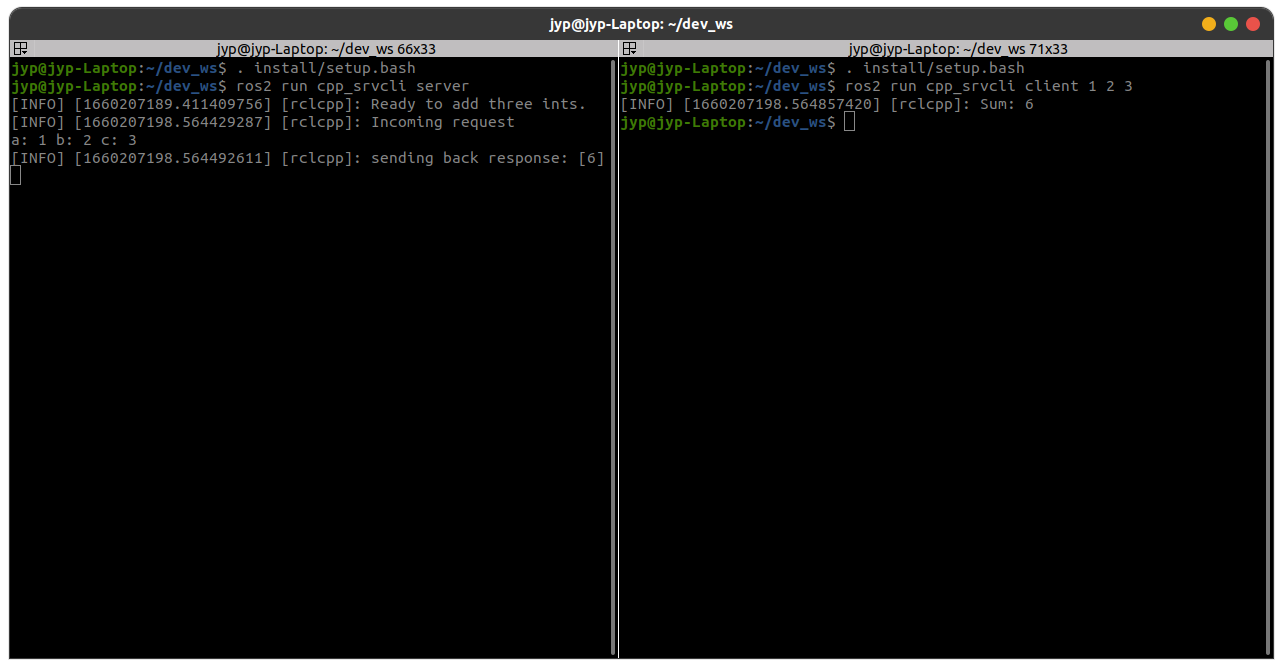
참고
The package "tutorial_interfaces" must not "build_depend" on a package with the same name as this package 이게 "build_export_depend", "exec_depend" 이렇게 3개 에러 뜨네용.. 뭐죠?
에만 알려주신대로 했는데..