컨볼루션 신경망의 구조
최적의 필터를 학습으로 알아낸다!
영상에 필터를 씌워서, 학습시키는 방법이다. 이 CNN에 대한 이해를 다지고 프로젝트를 진행하는게 나을 것 같아서, CNN에 대해서 공부하고 정리해보는 시간을 가졌다.
컨볼루션층과 풀링층
컨볼루션층 convolution layer
-
입력 특징 맵(feature map)에 컨볼루션을 적용해서 얻은 특징 맵 출력한다.
-
입력 특징 맵은 개 채널로 구성되어 깊이가 인 크기의 맵!
- 즉, 모양의 3차원 텐서
-
여러 개의 필터를 사용해서 풍부한 특징 추출
- 필터의 깊이 = 입력 특징 맵의 깊이 ()
- 필터의 크기 = , ( = 보통 3 or 5)
- 하나의 바이어스 값을 추가로 가짐
- 따라서, 필터는 개의 가중치를 가짐
- 좌우, 상하 방향으로 이동 (깊이 방향 이동 X)
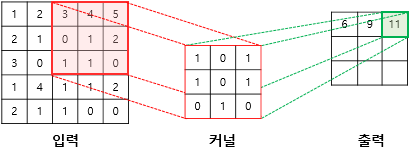
- 곱의 합, 즉 로짓을 구하는 컨볼루션 수행!
-
로짓에 활성 함수를 적용한 결과를 출력 특징 맵에 씀
- 컨볼루션 층의 경우 보통 ReLU 또는 ReLU의 변종을 사용함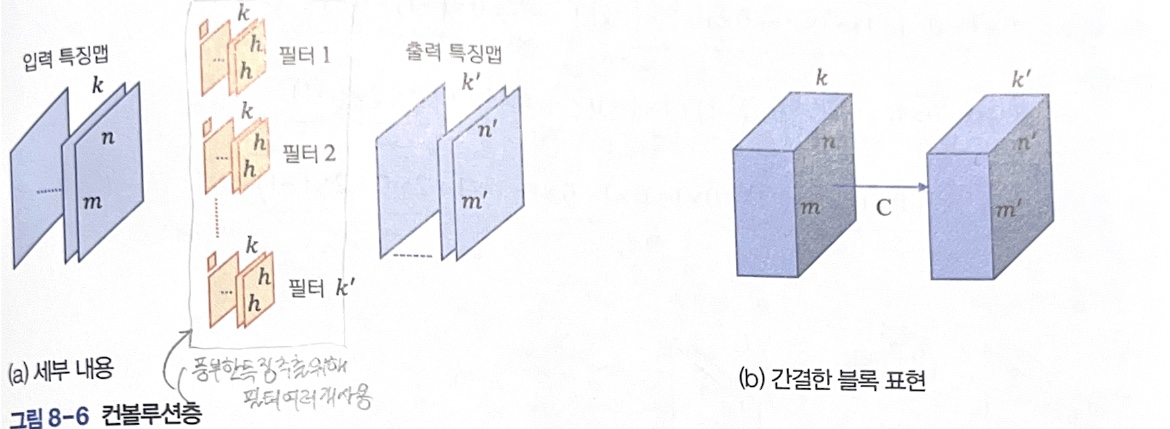
-
필터 개수 k’로 표기했는데, 보통 16, 32, 64, 128, 256 사용한다.
-
필터 하나가 특징 맵 하나를 생성한다고 본다!
- 따라서, 출력 특징 맵은 필터의 개수에 해당하는 깊이의 맵이다.
- 즉, 모양의 텐서가 된다!
-
-
맵의 경계에서 필터를 대면 일부 화소가 밖으로 나가기 때문에 적용 불가능한 문제 발생한다.
- 현상 방지를 위해, ‘0 덧대기’ or ‘복사 덧대기’ 적용! (padding)
- 0 덧대기: 경계 바깥에 0을 덧대는 것
- 복사 덧대기: 경계 화소의 값을 복사해서 덧댐
- 보폭(stride)을 로 설정하면 화소씩 건너 필터 적용
- 출력 맵의 크기를 줄이는 효과가 있음!
- 보폭이 면 맵이 로 줄어듦
- 현상 방지를 위해, ‘0 덧대기’ or ‘복사 덧대기’ 적용! (padding)
[CS231n Convolutional Neural Networks for Visual Recognition](https://cs231n.github.io/convolutional-networks/#conv)컨볼루션층의 특징
-
가중치 공유 weight sharing
- 필터의 값 = 가중치 (필터 속 숫자)
- 입력 특징 맵의 모든 화소가 같은 필터를 사용함
⇒ 가중치를 공유한다! -> 가중치의 수가 줄어드는 효과 발생!
-
부분 연결성 partial connection
- 필터가 해당 화소 주위로 국한하여 연산하는 부분 연결성 만족
-
이러한 특징들이 학습 알고리즘이 최적화해야 할 가중치 개수를 획기적으로 줄여줌
- 컨볼루션 층에는 개의 필터가 있기 때문에, 학습 알고리즘이 추정해야할 가중치는 개가 됨!
- 바이어스 노드로 인해 1을 더해주어야 함
- 컨볼루션 층에는 개의 필터가 있기 때문에, 학습 알고리즘이 추정해야할 가중치는 개가 됨!
풀링층 pooling layer
-
컨볼루션층 뒤에 풀링층이 따르는 편!
-
상세함을 줄이는 효과와 특징 맵의 크기를 줄여 신경망의 효율을 높이는 효과 제공
- 특징 맵에는 인식에 불필요할 정도로 지나치게 상세한 내용이 많기 때문에 풀링층이 필요함
-
예시
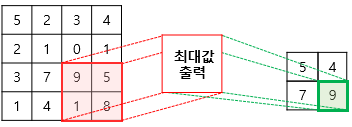
- 필터로 최대 풀링(max pooling)을 수행!
- 최대 풀링 = 필터 안의 화소 중에서 최댓값을 취하는 연산 <보통 많이 사용함>
- 평균 풀링 = 필터 안에 있는 화솟값의 평균 취함
- 보폭 = 2
- 1개의 화소 건너 필터 적용, 특징 맵은 반으로 줄어들게 됨
- 필터로 최대 풀링(max pooling)을 수행!
빌딩블록을 쌓아 만드는 컨볼루션 신경망
빌딩블록 쌓기
- 보통의 컨볼루션 신경망은 컨볼루션 층과 풀링층을 번갈아 쌓아 만듦
- 특징 맵의 크기 은 컨볼루션 층과 풀링층 보폭에 따라 바뀜
- 깊이 는 컨볼루션층에서는 필터 개수에 따라 바뀜, 풀링층에서는 그대로 유지한다!
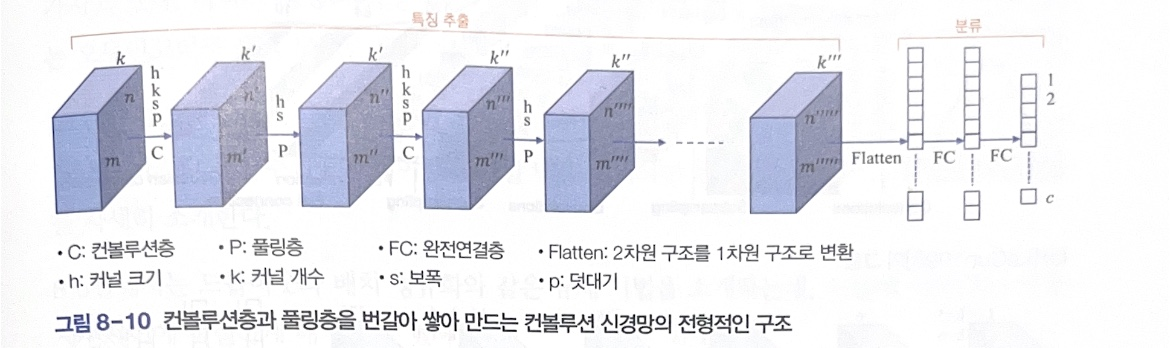
신경망의 앞 부분의 컨볼루션층과 풀링층은 특징 추출 역할 담당!
뒷부분은 완전연결층을 쌓아 분류 수행을 진행한다.
-
앞부분과 뒷부분 사이 flatten 연산의 경우, 컨볼루션층의 다차원 구조를 1차원 구조로 변환해 완전연결층에 입력하는 것
-
이후, 출력층에는 분류할 클래스 개수에 해당하는 만큼 노드 배치!
-
컨볼루션 신경망의 구성요소
- 컨볼루션층
- 풀링층
- 완전연결층
을 쌓아서 만들기 때문에 데이터에 따라 또는 풀어야 하는 문제에 따라 다양한 모양으로 조립할 수 있음!
컨볼루션 신경망의 학습
컨볼루션 신경망을 위한 역전파 알고리즘
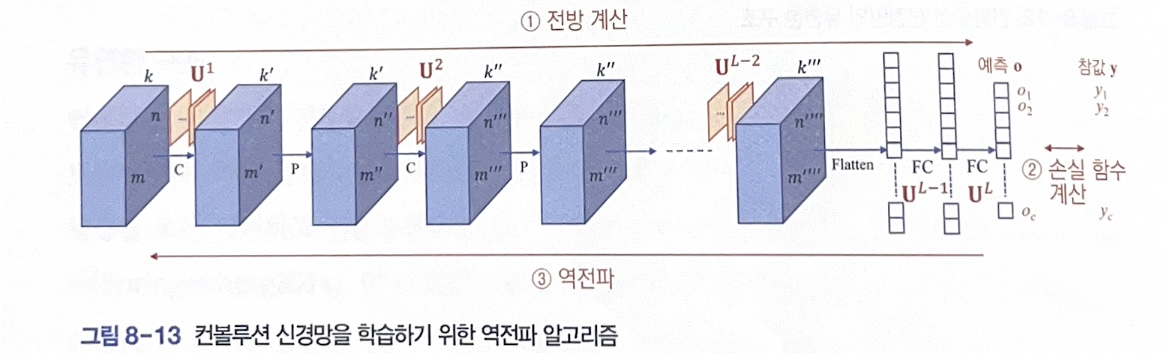
1단계의 전방 계산에서 컨볼루션층 & 풀링층 → 완전연결층 거쳐 출력 벡터 를 출력
2단계에서 손실 함수를 통해 와 참값 벡터 의 오류를 계산함
3단계 역전파 단계에서 오류를 줄이는 방향으로 가중치 갱신
- 이때 갱신되는 가중치는 컨볼루션층에 있는 필터 와 완전연결층에 있는 임
- 풀링층은 단순히 최대를 취해서 가중치 X
다층 퍼셉트론을 위한 역전파 알고리즘과 컨볼루션 신경망에 그대로 적용됨
but, 완전연결층과 계산이 다르기 때문에 계산식에 따라 미분만 다르게 수행하면 됨!
특징 학습과 통째 학습
- 컨볼루션 신경망의 우수성
- 특징 추출을 담당하는 필터를 학습한다!
- 학습 알고리즘은 주어진 데이터셋을 인식하는데 최적인 필터를 찾아냄
- 이를 특징 학습(feature learning)한다고 표현
- 다른 관점에서 바라보면 통째 학습(end-to-end learning)으로 표현
- 고전적 컴퓨터 비전에서는 특징을 사람이 설계한 방법으로 추출
- LBP, SIFT, HOG 등..
- 딥러닝 패러다임의 경우 통합된 신경망에서 특징 학습과 분류기 학습을 통째로 진행
- 고전적 컴퓨터 비전에서는 특징을 사람이 설계한 방법으로 추출
- 특징 추출을 담당하는 필터를 학습한다!
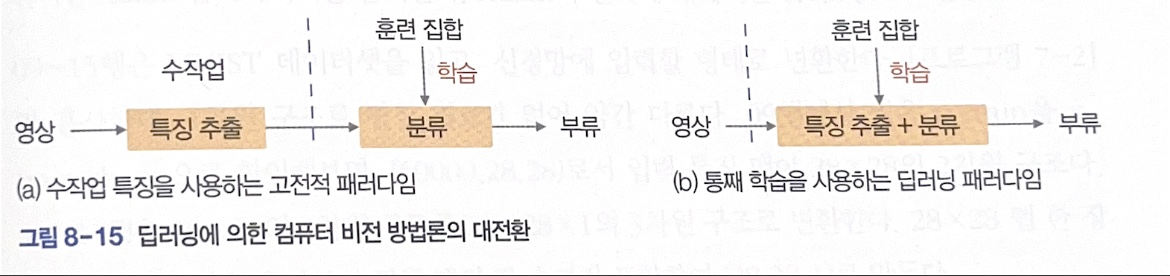
고전적 패러다임 = 수작업 특징으로 분류 모델 학습 → 특징 추출 프로그램 + 분류기 프로그램 결합컨볼루션 신경망이 우수한 이유
- 데이터의 원래 구조를 유지함
a. 다층 퍼셉트론의 경우, 영상을 모델에 맞춰 1차원 구조로 변환하여 입력
b. but, 컨볼루션 신경망은 3차원 구조를 그대로 입력!
- 특징 학습을 통해 최적의 특징을 추출함
a. 통째 학습이 가능해져 사람의 개입을 최소화하고, 특징과 분류를 동시에 최적화함
- 신경망의 깊이를 깊게할 수 있음
a. 컨볼루션층은 가중치 공유와 부분 연결성이라는 특성으로 인해 가중치가 적음
b. 따라서 층을 깊게 해도 무리 없이 학습이 이루어짐
c. 층을 깊게하면, 더 세밀한 계층 구조의 특징을 추출할 수 있어서 인식 성능 향상
참고 자료
- 책 '컴퓨터 비전과 딥러닝'
- http://taewan.kim/post/cnn/
- 위키독스, PyTorch로 시작하는 딥 러닝 입문, https://wikidocs.net/62306
이렇게 유용한 정보를 공유해주셔서 감사합니다.