
During the recent years the quadruped/four-legged robots have ganied extensive fame. Although the first quadruped robot was introduced in 1960's named phony pony, it was not possible to commercialize them due to technological and economical situations. The Unitree robotics provided the break through in commercializing the quadruped robot. They released first robot A1 in 2018, that rapidly gained the interest of the community. After that some more robot dog models (GO1, B1, B2) were introduced that laid the foundation of the development of the Unitree GO2.

In this post we will look into the specifications of GO2 and answer some frequently questions. After reading this post it will be easy for you to select GO2 as your next development venture.
GO2 Specifications and Datasheet
Unitree GO2 provides super recognition system, max running speed of 5 m/s, peak joint torque of approximately 45 Nm, Wireless Modules (Wifi 6/Bluetooth/4G), Ultra-long battery Endurane (2-4 hours), intelligent side follow and Intelligent obstacle avoidance and much more. To know about the specification and datasheet of GO2 please refer to the offical page.
https://shop.unitree.com/products/unitree-go2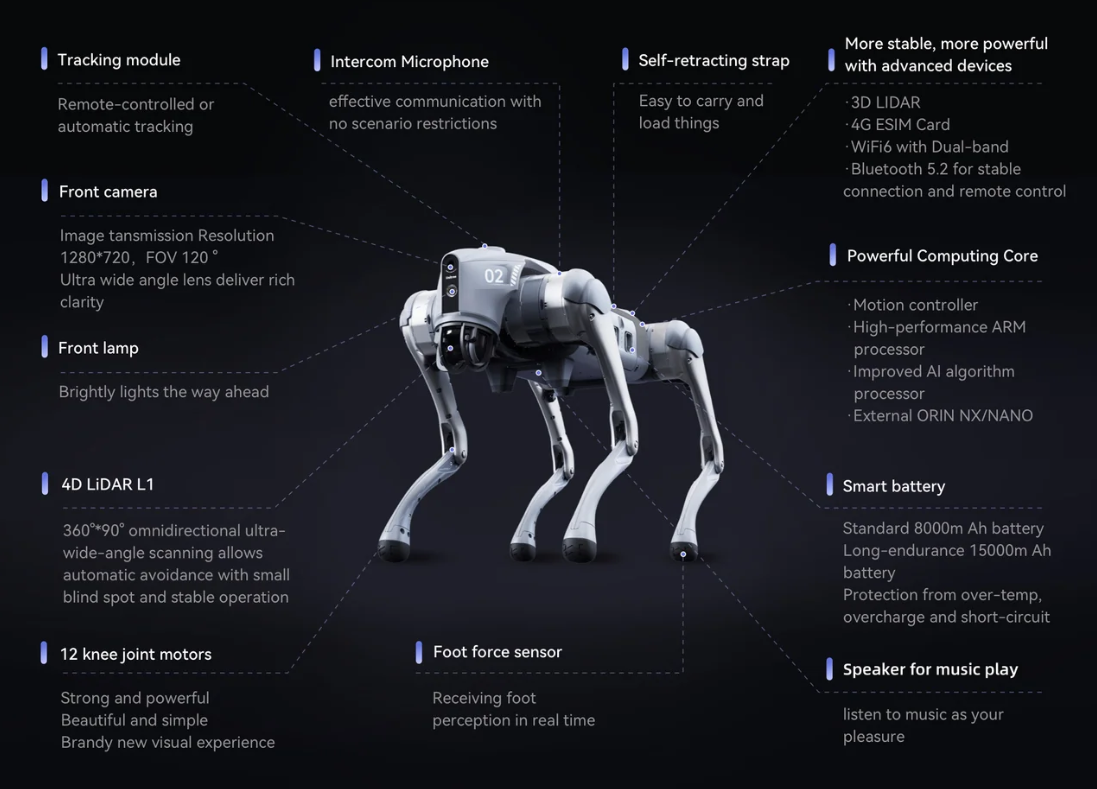
Frequently asked questions
Q1. How GO2 uses GPT (Generative Pre-trained Transformer) model for voice response is it open source?
Unitree provide cloude server with GO2. The Unitree cloud server contain the GPT model. To use this feature users need to install Unitree GO mobile aplication. The feature in the application is named BenBen Dog that enables use of GPT on GO2. In short the GPT model is not open source.

Q2. Is GO2 main controller is capable of running Reinforcement or Deep Learning algorithms?
The controller in GO2 is Jetson Orion Nano (8 or 16 GB). This is not enough for reinforcement learing, some deep learning algorithms can work. But this do not limit GO2 as it can receive command from supplementry PC over ethernet interface. If you want to implement reinforcement learning (RL) with GO2 please refer to the official documentation.
https://support.unitree.com/home/en/developer/rl_exampleQ3. Does GPT run on local embedded system? What is the block diagram expressing the relationship between GPT and main controller?
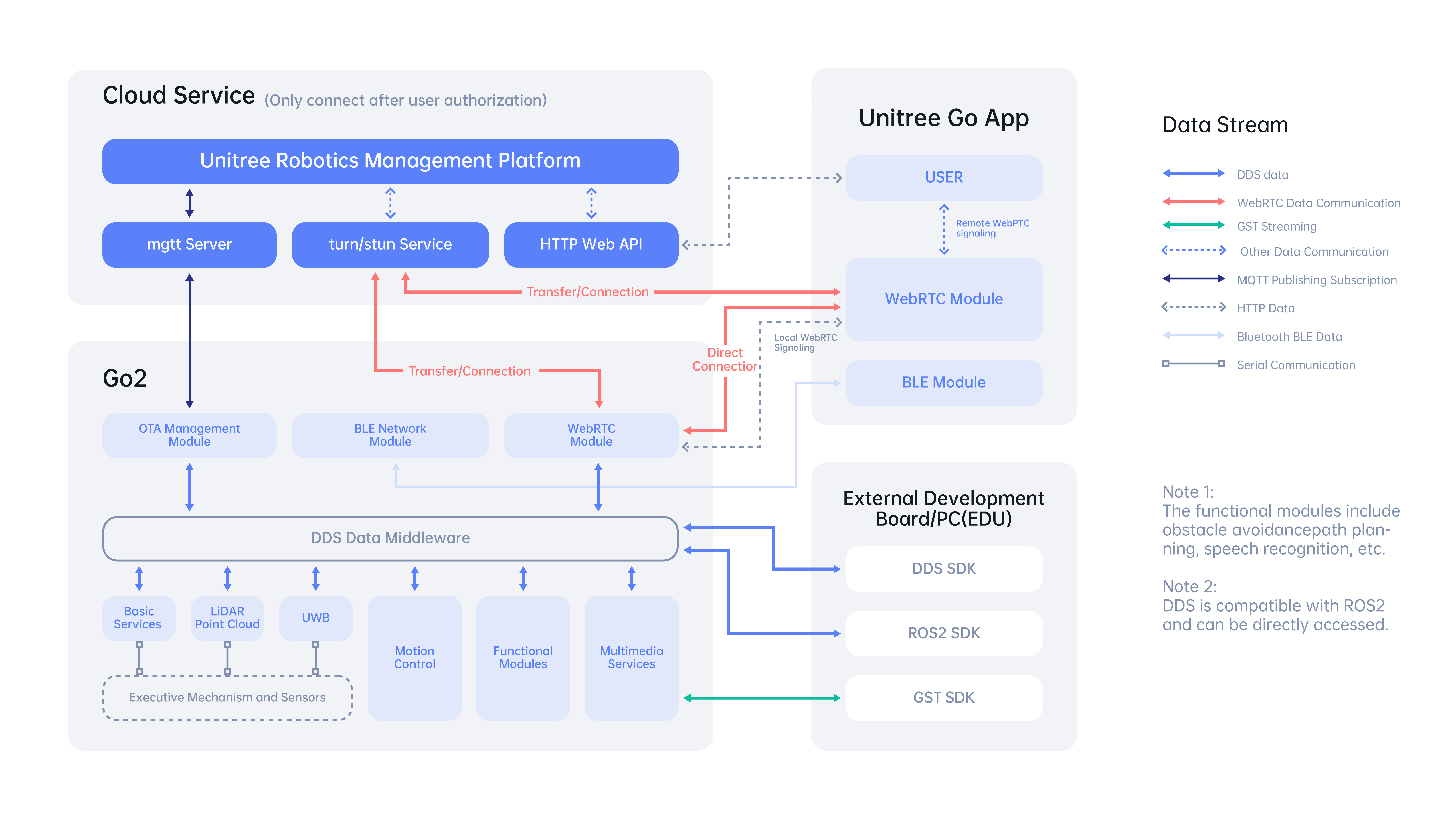
The first part of this question is same as Q1, the GPT run on cloud server not on local system. The figure below is the block diagram expressing the relationship between GPT and main controller.

The GO2 mobile application send the recorded voice to Unitree cloud server using WebRTC module. The GPT model located in the server process and return the responce to the controller and finally GO2 speak or perform action.
Q4. What is the storage of GO2?
Unitree GO2 uses Jetson Orion Nano therefore the storage is flexible and depends on external NVMe. The commoly used is 128 GB.
Q5. What sensors GO2 have and can we use sensors data?
GO2 comes with 4D LiDAR and a camera. The sensors data can be accessed through GO2 SDK and ROS 2 interface. Additional sensors can also be added to GO2. The list of supported sensors is also available on the officical website.
Q6. Can GO2 be controlled using ROS2?
Yes, GO2 supports ROS 2 interface. It can be controlled using ROS2. The data distribution service (DDS) used in GO2 is compatible with ROS 2 and can be directly accessed. Please refer to the unitree ROS 2 package on github.
Q7. What applications can be developed with GO2?.
GO2 is a flexible platform and many robotics application can be implemented with it such as "autonomous navigation" or "surveillance".
Q8. Go2 is listed as having a built-in 4G ESIM, WiFi, and Bluetooth chips. What is the purpose of each 4G, WiFi, and Bluetooth communication?
The 4G ESIM is available in the GO2 EDU pro version used for remote monitoring (long range control). It has the capability to transmit HD pictures from GO2 and real-time stable motion control using Unitree GO App. Currently, unitree provides the ESIM support only in China and European territories.
The Bluetooth module connects the GO2 with Unitree GO App.
The Wifi/WebRTC module connects the GO2 with Unitree GO App as well as the Unitree Cloud service to use services such as Benben dog (GPT based Assistant mode) and system upgrades.
Apart from that GO2 has ethernet interface through which users can connect to the main controller.
Please refer to the architecture image below for further details.
Q9. Is it possible to receive or log the output value of each sensor internally?
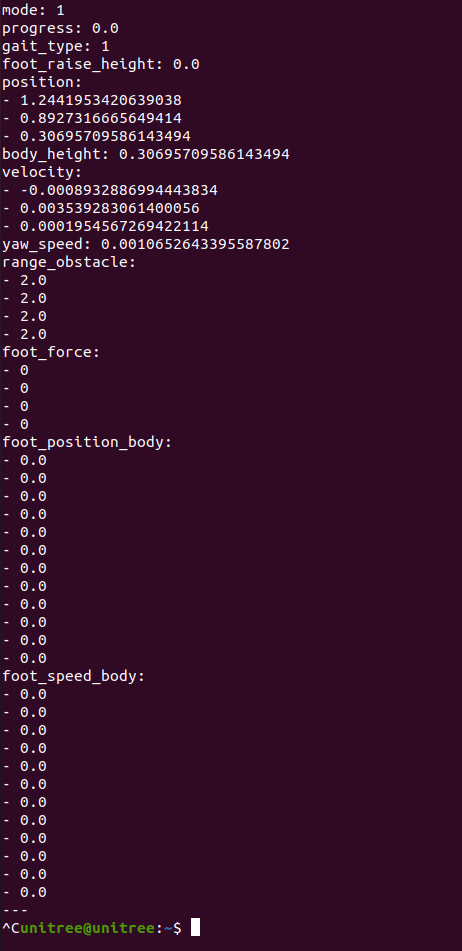
Yes it is possible to receive and log module values such as joint states, camera, LiDAR, etc. As GO2 uses the ROS 2 development framework. As a reference, GO2 can log its state status shown in figure below.
Conclusion
The GO2 robotics platform shines with its adaptability and potential to revolutionize applications in AI and autonomous systems. Its high-performance motors and advanced AI integration enable dynamic movement and intelligent decision-making. Compatible with ROS 2, its lightweight, durable frame allows for customization with various sensors and tools, opening doors for applications in disaster relief, logistics, agriculture, and research. As AI evolves, the GO2 platform stands poised to be a game-changer for years to come.
