2주차에서는 벡터에 대한 각종 연산, 기저변환(change of basis), 선형독립(linear independence) 등에 관한 내용을 다룬다.
DISCLAIMER: 아래 내용은 오로지 Coursera 강의를 토대로 제가 이해한 대로 정리한 것이기 때문에 부정확하거나 설명이 그닥 친절하지 않은 부분이 있을 수도 있습니다.
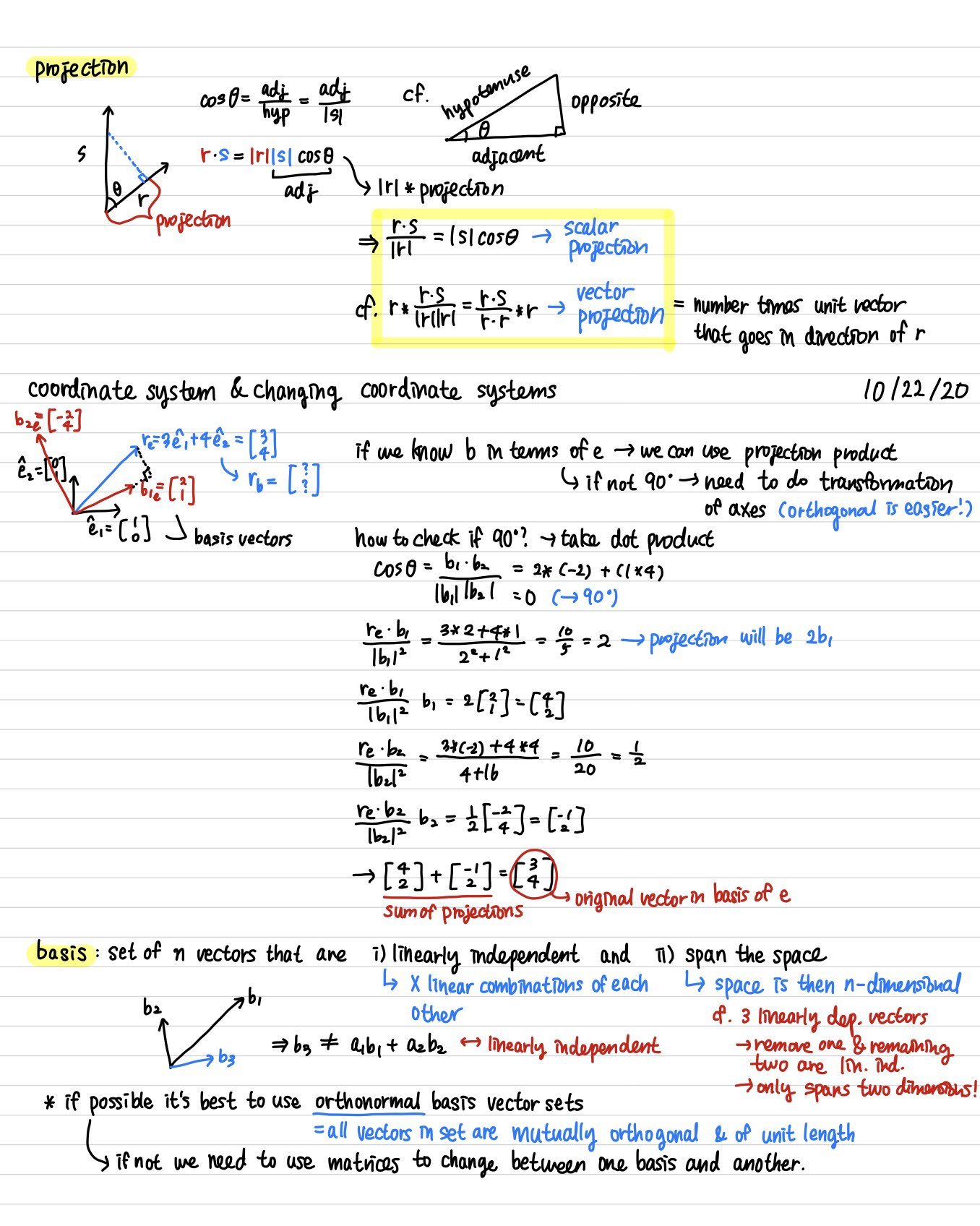
사영벡터(projection)
사영(projection)은 쉽게 이해하자면 벡터의 그림자 같은 것이라고 생각하면 된다고 한다. 사실 학부 강의에서 배웠을 때에는 projection이라는 게 어떠한 의미를 지니는지 충분히 이해하지 못한 채 공식을 외우는 데만 신경을 썼다. 그래서 시험이나 과제에서 응용 문제가 나오면 잘 풀지 못했다.
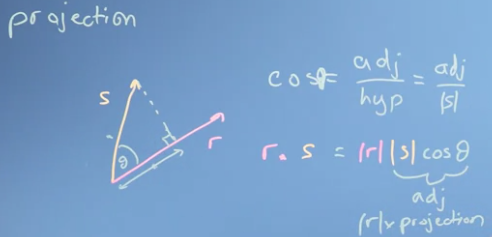 벡터 를 벡터 에 수직으로 내리면 직각삼각형이 생긴다. 이렇게 생긴 삼각형에 대해서 우리가 고등학교 때 배운 코사인 공식을 대입해보자.
벡터 를 벡터 에 수직으로 내리면 직각삼각형이 생긴다. 이렇게 생긴 삼각형에 대해서 우리가 고등학교 때 배운 코사인 공식을 대입해보자.
(cf. : adjacent, : hypotenuse)
즉 로 표현할 수 있다. 여기서 adjacent변의 길이는 곧 사영벡터의 크기와 같다.
그리고 와 의 내적은 이므로 여기에 공식을 대입하면 다음과 같은 결과가 나온다.
scalar projection:
그리고 사영벡터 자체를 구하려면 여기에 단위벡터(unit vector)인 를 다음과 같이 곱해주기만 하면 된다. 즉 단위벡터는 벡터 의 방향을 나타낸다고 생각하면 될 것 같다.
vector projection:
이렇게 구한 사영벡터를 이용하여 우리는 기저변환이라는 것을 할 수 있다.
기저변환(change of basis)
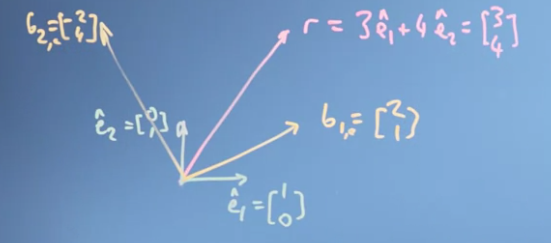
기저벡터 , 와 이 기저벡터들로 표현된 벡터 가 있다.
여기에 새로운 기저벡터 , 를 추가해보자. 여기서 기저변환(change of basis)을 통해 벡터 를 새로운 기저벡터 , 에 대하여 표현되도록 바꿀 수 있다.
 우선 , 에 벡터 를 사영시킨 scalar projection 값을 구한다. 에 를 사영시킨 scalar projection 값은 다음과 같다.
우선 , 에 벡터 를 사영시킨 scalar projection 값을 구한다. 에 를 사영시킨 scalar projection 값은 다음과 같다.
에 을 사영시킨 사영벡터는 이 된다.
마찬가지로 에 를 사영시킨 scalar projection 값을 구해보자.
에 를 사영시킨 사영벡터는 가 된다.
따라서 벡터 는 기저변환을 통해 로 표현할 수 있다. 여기에 , 의 값을 대입하면 기존에 에 대해 표현한 벡터 값인 이 나오는 것을 확인할 수 있다.
기저(basis)와 선형독립(linear independence)
기저(basis)란, 벡터 공간에서 다음과 같은 성질을 가지는 n개의 벡터의 집합이다.
-
벡터들은 서로 선형독립적(linearly independent)하다. 즉, 서로 선형조합(linear combination)이 아니어야 한다. (대충 다른 벡터들을 조합해서 나머지 한 벡터를 만들 수 없어야 한다는 뜻)
- 두 개의 벡터 , 가 있을 때 이어야 linearly independant하다.
- 마찬가지로 세 개의 벡터 , , 가 있을 때 이어야 linearly independant하다.
-
벡터들은 공간을 span해야 한다. 공간이 n차원일 때, 서로 선형독립인 n개의 벡터가 존재해야 한다. 만약에 3차원 공간에서 2개의 벡터만 linearly independent한 상태라면 해당 기저는 2차원까지만 span한다고 볼 수 있다.
강의에서는 기저벡터들이 orthonormal한 게 이상적이라고 한다. 여기서 orthonormal하다는 것은 집합에 있는 모든 벡터가 서로 직교(orthogonal)하고 단위벡터(unit vector)라는 뜻이다. 아... 맨날 헷갈렸었는데 orthonormal이 ortho+normal이라는 걸 오늘 처음 깨달았다... 바보 된 기분 허허
필기 첨부