

실무 프로젝트:자율주행(1)
[Robotics Bootcamp] 1-2일차: TurtleBot4 셋업부터 Depth 카메라 활용까지 🐢 드디어 시작된 로봇 부트캠프! 첫날과 둘째 날은 당장 복잡한 알고리즘을 짜기보다, 로봇 제어의 기초가 되는 탄탄한 환경을 구축하는 데 집중했다. 1일차의 '인

Nav2 개념 정리
오늘은 ROS 2 기반의 자율주행 스택인 Nav2 (Navigation 2)의 핵심 개념들을 정리해 보려고 한다. 과거 ROS 1의 move_base를 사용해 봤다면, Nav2가 얼마나 더 강력하고 유연해졌는지 느끼실 수 있을 것이다. Nav2는 단순히 경로를 따라
3D Point Cloud Processing and Learning for Autonomous Driving 간단 리뷰
3D Point Cloud Processing and Learning for Autonomous Driving 논문에서 설명하는 LiDAR 기반의 Point CLoud를 어떻게 처리하는지 알아보고자 합니다.논문 “3D Point Cloud Processing and L
자율주행과 산업용 로봇
부트캠프에 참여하면서 파이썬과 컴퓨터비전을 배웠고 지금은 ROS2에 대해 배우고 있으며 ROS2를 마치면 데브옵스를 간단하게 배우고 바로 실무 프로젝트에 들어간다. 이번 포스팅에서는 실무 프로젝트에서 다루게 될 자율 주행과 산업용 로봇에 대해 예습하고자 한다. 1.
ROS2
ROS2 강의를 듣기 전에 예습하고자 ROS2의 개요와 구조에 대해 포스팅하고자 한다. 1. 🤖 ROS2 란? 정의 및 역사 ROS(Robot Operating System)는 로봇 소프트웨어를 개발, 관리, 배포하기 위한 도구와 라이브러리를 제공하는 개방형 프
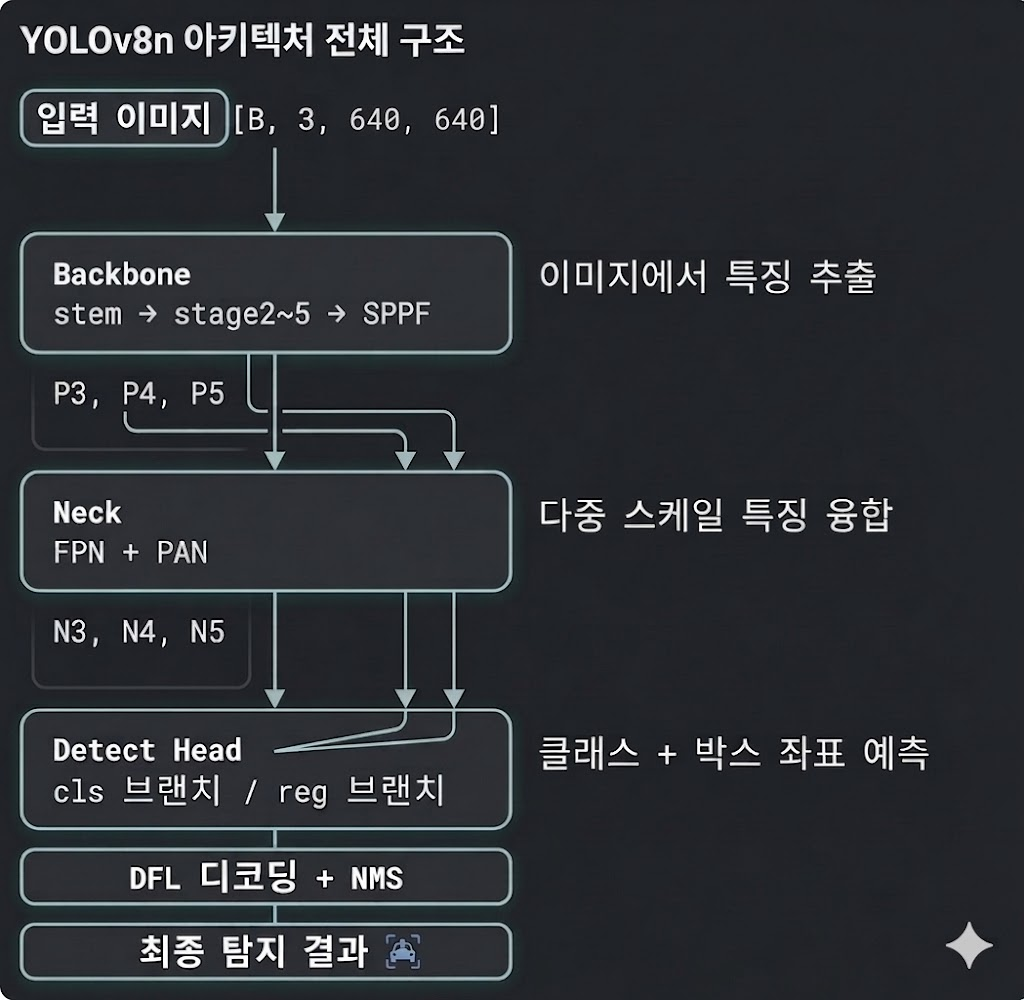
YOLOv8
Ultralytics 없이 PyTorch로 구현 들어가며 이 글은 Ultralytics 라이브러리 없이 YOLOv8n 아키텍처를 PyTorch로 직접 설계하고, 사전 학습된 가중치를 이식해 실제 객체 탐지까지 동작시킨 과정을 담고 있다. 단순히YOLO("yolov8n
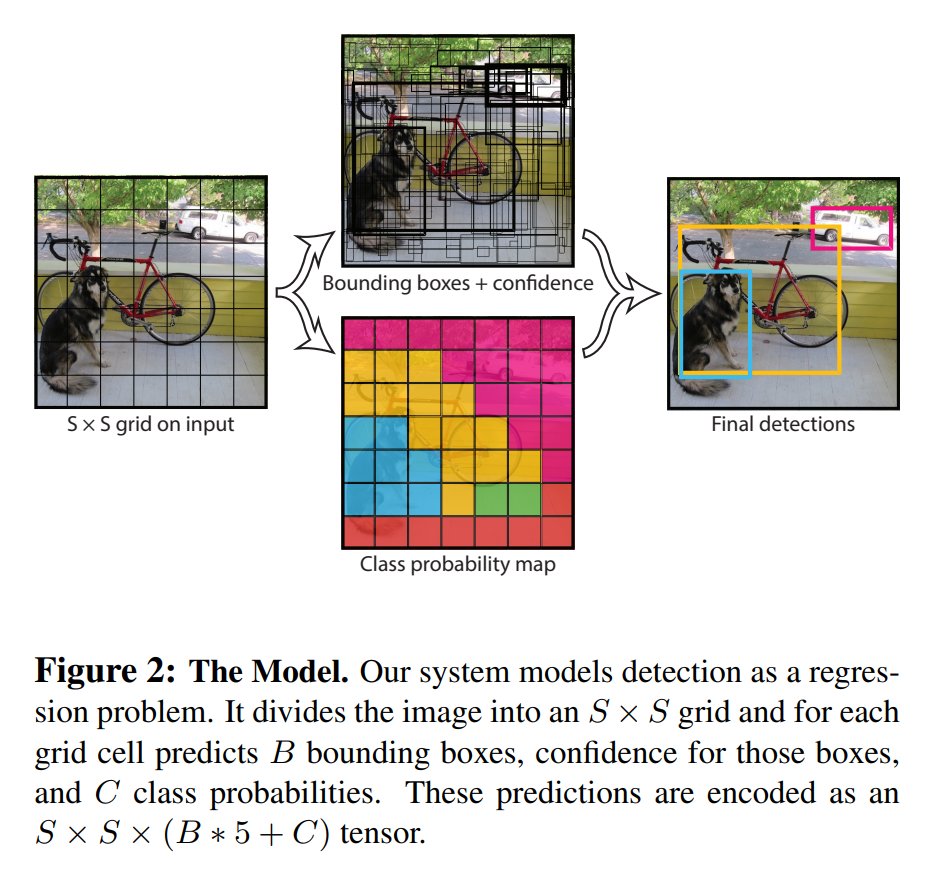
Object Detection (5) YOLO v1
지난 포스팅까지 우리는 R-CNN 계열(2-Stage Detector)이 어떻게 발전해 왔는지 살펴보았다. Faster R-CNN에 이르러 RPN을 도입하며 속도를 비약적으로 끌어올렸지만, 여전히 '후보 영역 추출'과 '분류'라는 두 단계를 거쳐야 한다는 구조적 한계가
Object detection (4) Faster R-CNN
이전 포스팅에서 살펴본 R-CNN과 Fast R-CNN은 딥러닝 기반 객체 탐지의 발전 과정에서 중요한 역할을 했다.특히 Fast R-CNN은 전체 이미지를 한 번만 CNN에 통과시키고, RoI Pooling을 통해 연산량을 크게 줄이며 속도와 정확도를 동시에 개선하는
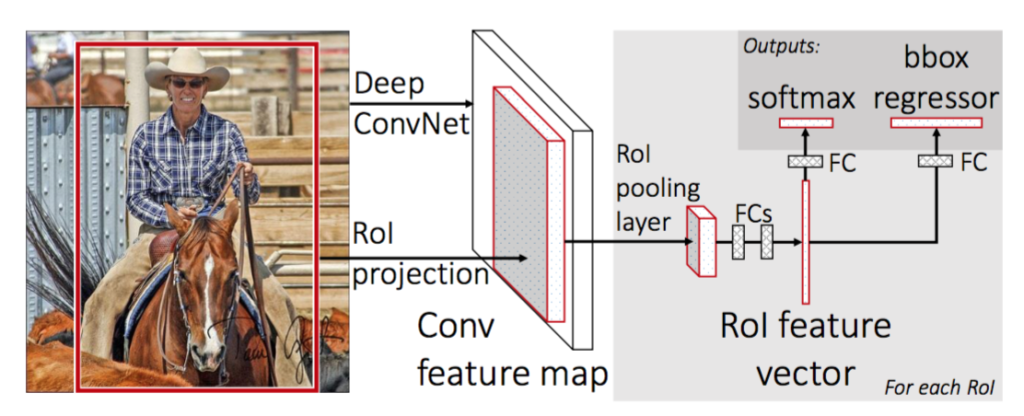
Object detection (3) Fast R-CNN
이전 포스팅에서 다룬 R-CNN은 딥러닝 객체 탐지의 서막을 열었지만, 극복해야할 명확한 한계점들을 가지고 있었다.성능 손실: AlexNet에 넣기 위해 이미지를 227x227 으로 강제로 Warping 시켜 형태 왜곡 발생느린 속도: Selective Search로
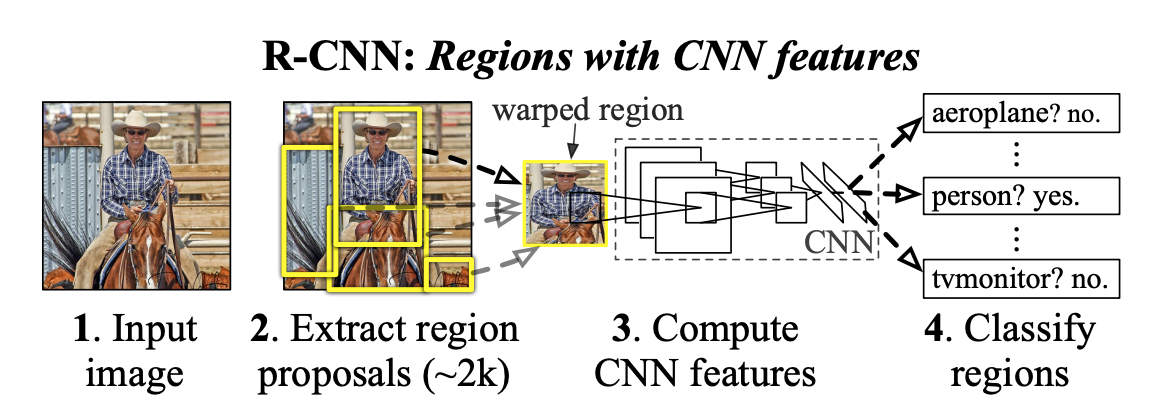
Obect detection (2) R-CNN
이 글에서는 초창기 Object Detection 분야에 큰 획을 그은 모델인 R-CNN (Regions with CNN features)에 대해 다룬다.R-CNN이란 이미지 내에서 객체의 위치를 찾고 (Localization) 그 종류를 분류(Classificatio
Object detection (1) 개요
이번 포스팅을 시작으로 컴퓨터 비전 분야의 핵심 기술 중 하나인 Object Detection(객체 탐지)에 대해 시리즈로 다루어보려고 한다.딥러닝을 활용한 이미지 인식 기술은 하루가 다르게 발전하고 있다. 앞으로 이 시리즈를 통해 딥러닝 기반 Object Detect
YouTube-8M 영상 데이터를 활용한 다중 라벨 분류 실습
이번 스터디에서는 지난 주에 진행했던 최적화 함수와 활성화 함수에 대해 더 깊이 공부하고자 실습을 추가로 공부하기로 하였고 실습부분을 다뤄보고자 한다. 활성화함수와 최적화 함수를 실제로 다뤄보기 위해 YouTube-8M 데이터셋을 선택하였고 이유는 다음과 같다 !
알고리즘(7) DFS, BFS
노드(Node)와 그 노드들을 연결하는 간선(Edge)으로 이루어진 네트워크망 자료구조그래프 안에 있는 수많은 노드들을 특정 규칙에 따라 중복 없이, 한 번씩 빠짐없이 방문하는 과정DFS는 갈림길이 나타나면 특정 루트로 최대한 깊숙이 파고들어 탐색한 뒤, 막다른 곳에
알고리즘(6) 스택과 큐
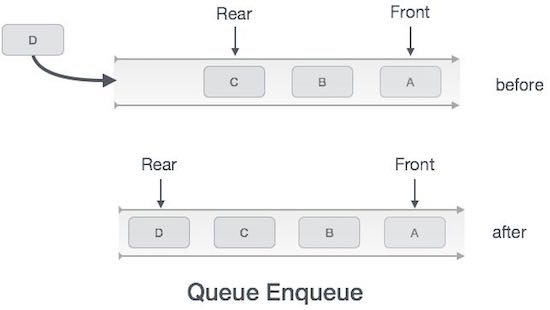
이번 포스팅에서는 가장 대표적인 자료구조인 스택(Stack)과 큐(Queue)에 대해 알아보고자 한다.스택(Stack)은 가장 나중에 들어온 데이터가 가장 먼저 나가는 구조를 가진 자료구조이다.이를 후입선출(LIFO, Last In First Out) 구조라고 한다.✔
알고리즘(5) 자료구조의 개념
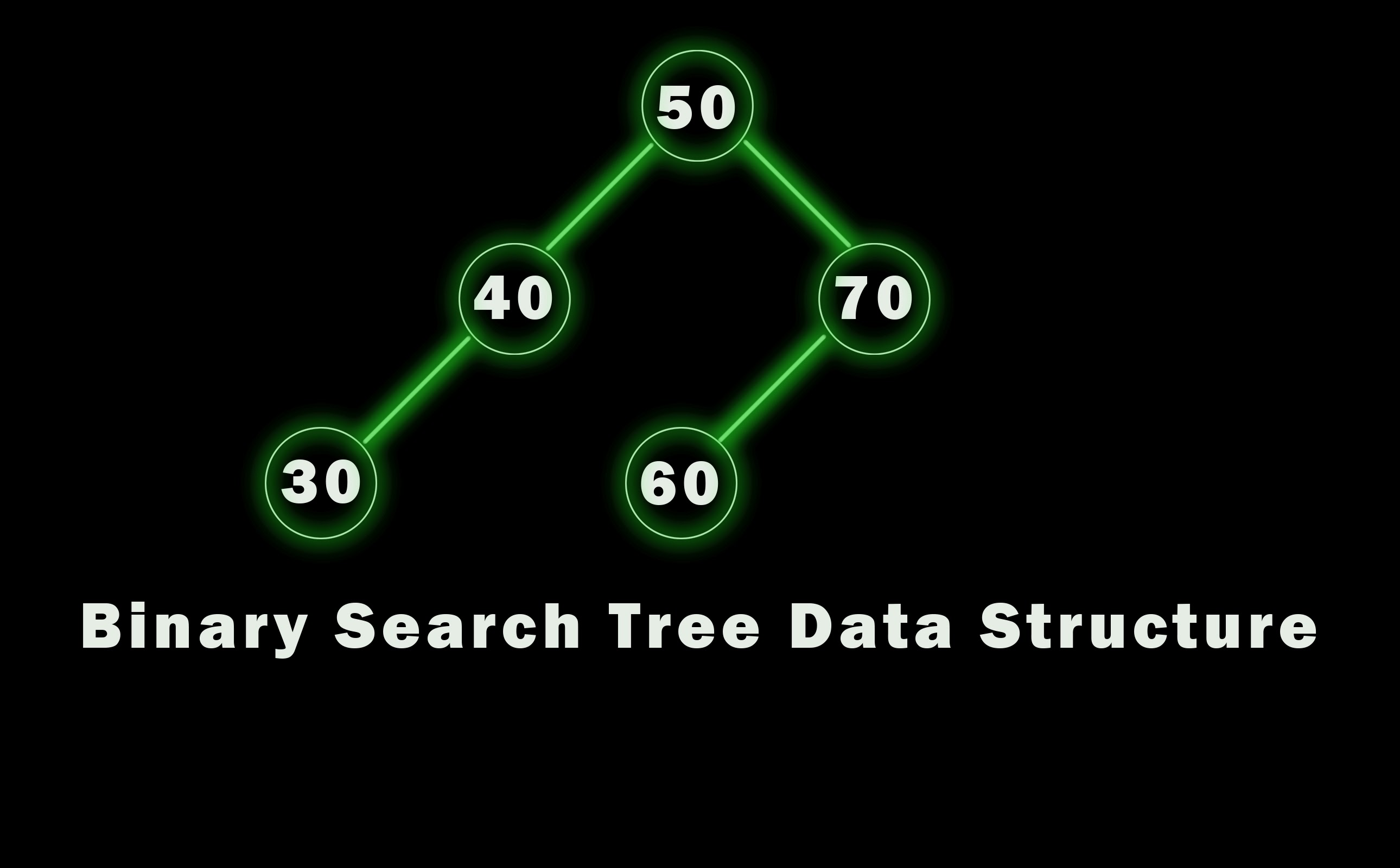
이번 포스팅에서는 자료구조(Data Structure)에 대해 공부한 내용을 정리해보려고 한다.원래 자료구조는 알고리즘의 선수과목이지만, 함께 묶어서 이해하는 것이 더 자연스럽다고 생각하여 같이 정리한다.데이터를 효율적으로 저장하고 접근하고 수정, 관리하기 위한 방식이
알고리즘(4)
알고리즘을 공부하면서 자주 등장하는 개념 중 하나인 재귀 호출에 대해 정리해보자.👉 함수가 자기 자신을 다시 호출하는 방식을 의미한다.재귀 함수는 반드시 아래 두 가지 요소를 포함해야 한다.종료 조건 (Base Case)재귀 호출을 멈추는 조건이 조건이 없으면 무한
인공신경망(3)
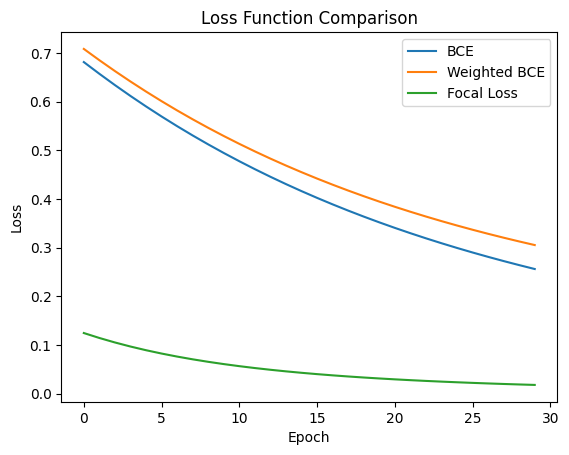
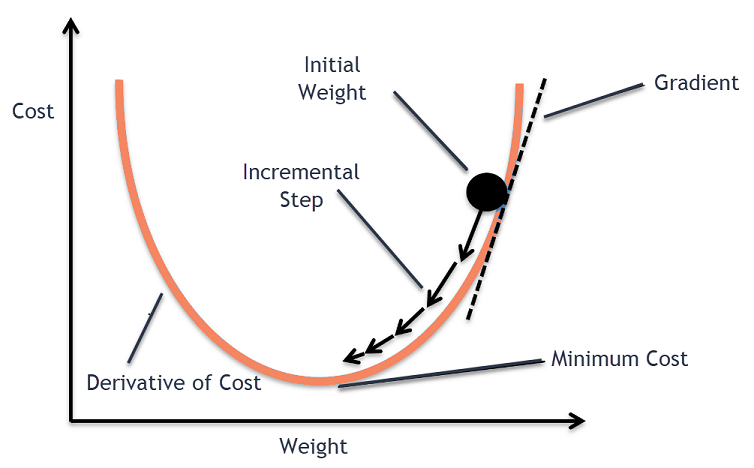
이번 포스트에서는 최적화 함수(Optimizer)와 손실 함수(Loss Function)에 대해 다루고자 한다.신경망 모델을 학습시키기 위해서는 모델의 오차를 최소화하는 최적의 가중치(Weight)와 편향(Bias) 매개변수를 찾아야 하는데, 이 과정에서 사용되는 것이
인공신경망(2)
이번 스터디에서는 인공신경망의 핵심 요소 중 하나인 활성화 함수(Activation Function)활성화 함수는 인공신경망에서 입력 신호를 출력 신호로 변환하는 역할을 합니다. 신경망에 '비선형성(Non-linearity)'을 도입하여 모델이 복잡한 문제를 해결할 수
인공 신경망(1)
이번 스터디의 핵심 주제는 '활성화 함수(Activation Function)' 와 '최적화 함수(Optimizer)' 이다. 하지만 이 두 가지를 제대로 이해하기 위해서는 인공신경망의 기초 동작 원리를 먼저 알아야 하므로, 이번 포스팅에서는 딥러닝의 뼈대가 되는 사전
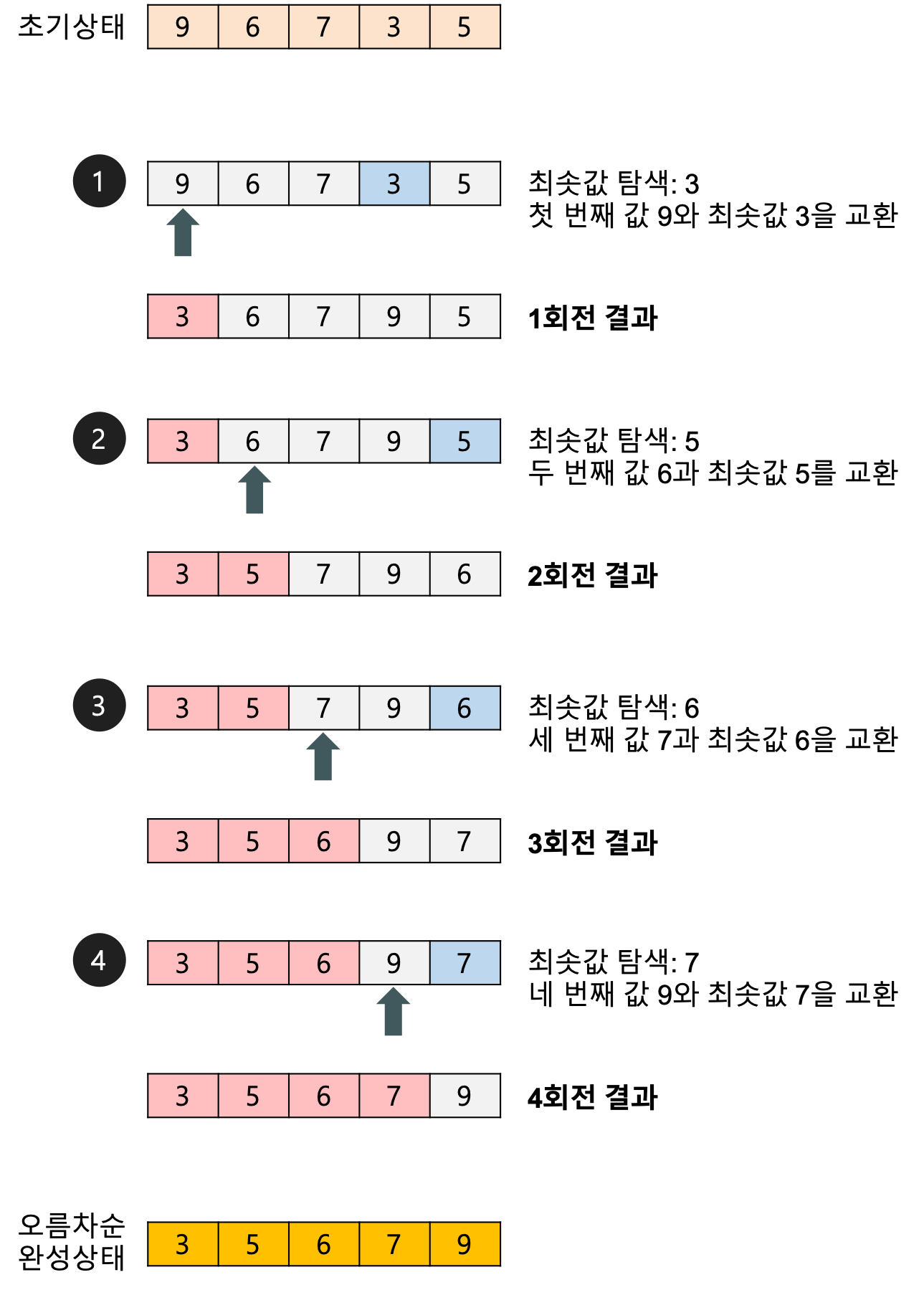
알고리즘(2)
1. 정렬 알고리즘이란? 여러 개의 데이터를 일정한 순서(오름차순 또는 내림차순)로 배열하는 알고리즘이다. 1.1 정렬 알고리즘을 사용하는 이유 데이터 검색 속도 향상 정렬된 데이터는 이진 탐색(Binary Search) 같은 빠른 탐색이 가능하다. 데이터