
- 전체보기(73)
- code(23)
- ros2(15)
- control system(9)
- prompt(7)
- mobility_engineering(6)
- 기술영업(4)
- mobility_enginering(2)
- Manipulator(2)
- Deep Learning(2)
- github(1)
- exhibition(1)
- Calibration(1)
- Paper(1)
- book(1)
- git(1)
건설업 관련 꿀직업
불보고 불이 날 것 같은지 확인하는 작업→ 화재감시자 (Fire Watcher)용접·용단 등 화기 작업 시 화재 발생 여부를 감시잔불 및 불꽃 비산 여부 확인야광봉을 들고 흔들면서 길 안내하는 사람→ 신호수 (Flagman / Traffic Controller)차량 및
4 - 1,2. 이 세상은 객체로 이루어져 있다 / 클래스의 세계로 오신 것을 환영합니다. (함수의 오버로딩, 생성자)
해당 내용은 씹어먹는 C++ 책을 기반으로 하단 블로그의 내용을 공부하기위해 적성한 글임을 알립니다. 4 - 1. 이 세상은 객체로 이루어져 있다 객체란 전에 작성한 Animal 구조체를 정의한 후, animal 변수를 만들어서 이를 필요로 하는 함수를 작성함
3. C++ 의 세계로 오신 것을 환영합니다. (new, delete)
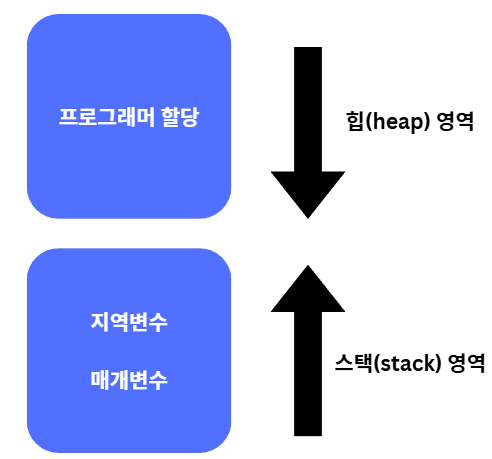
힙 : 동적으로 할당된 변수가 할당되는 영역(Dynamic Memory Allocation) 프로그래머가 직접 공간을 할당, 해제하는 메모리 공간 스택 : 프로그램이 자동으로 사용하는 임시 메모리 영역 함수 호출 시 생성되는 지역 변수와 매개 변수가 저장되는 영역으
2. C++ 참조자(레퍼런스)의 도입
해당 내용은 씹어먹는 C++ 책을 기반으로 하단 블로그의 내용을 공부하기위해 적성한 글임을 알립니다.change_val 함수의 인자 p 에 number 의 주소값을 전달하여, \*p 를 통해 number 를 참조하여 number 의 값을 3 으로 바꿈int& anoth
1-2 / 1-3 첫 C++ 프로그램 분석 및 공통점
해당 내용은 씹어먹는 C++ 책을 기반으로 하단 블로그의 내용을 공부하기위해 적성한 글임을 알립니다.해당 부분은 C++ 에서 표준 입출력에 대한 필요한것을 포함함int main()C 와 마찬가지로 C++ 에서의 main 함수는 프로그램이 실행될 때 가장 먼저 실행되는

1182_부분수열의 합
예제 입력 1 5 0\-7 -3 -2 5 8예제 출력 1 1항상 보는 백트래킹으로 문제를 풀이함이부분에서는 먼저 기입한 값과 동일하면 끝 그리고 input_sum이 같으면 output_count+1 형식으로 결과를 도출하고 자함이부분에서는 진행정도와 값이 계속 누적되는
1. Control system engineering(Introduction)
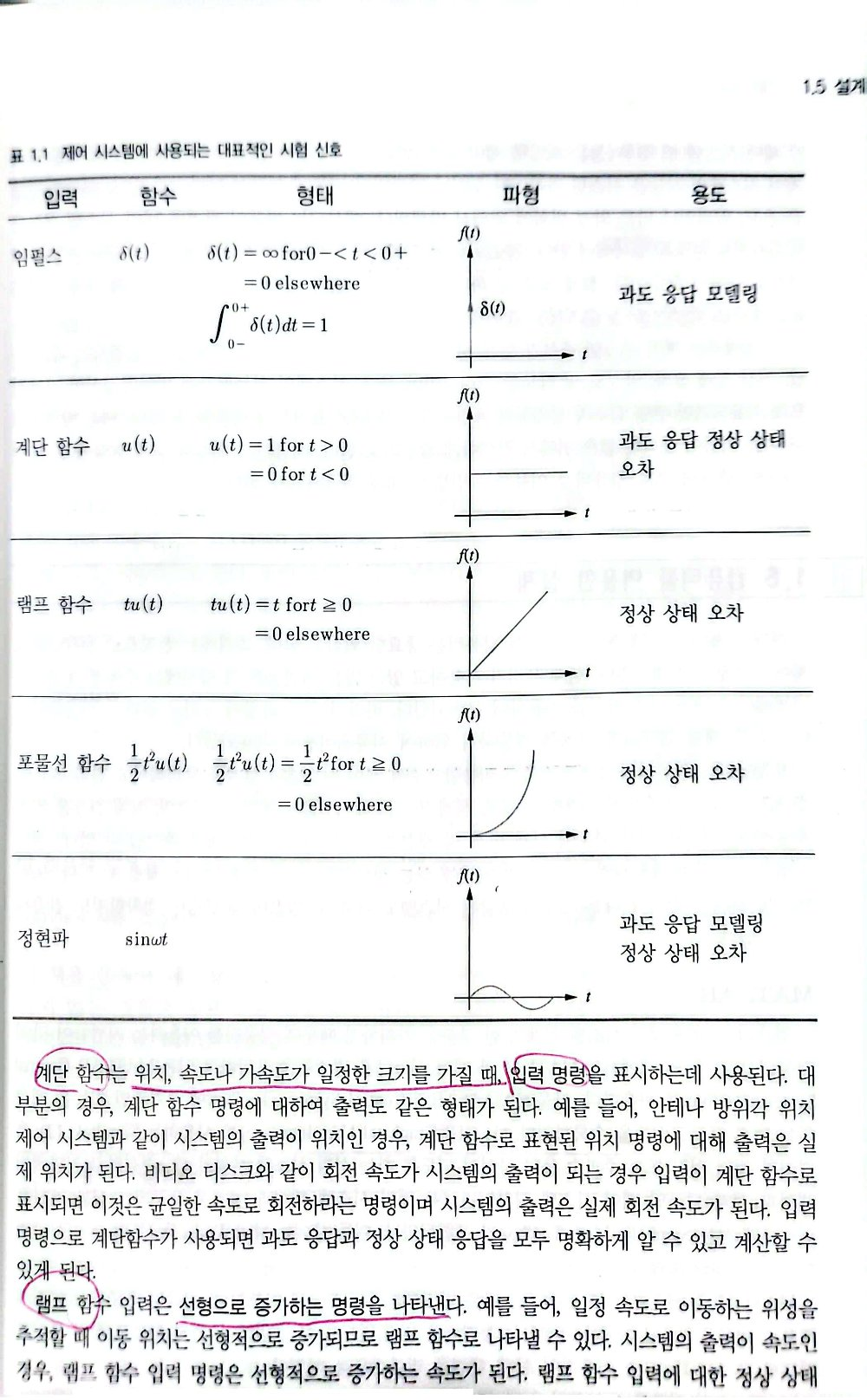
해당 글은 개인적으로 공부하기 위한 글로 알아주시면 감사하겠습니다.개루프 시스템은 입력 명령을 제어하기에 적합한 형태로 변환하는 입력변환기(input transducer)라는 보조 시스템으로 시작함입력은 기준입력(reference)로 칭하며 출력은 피제어 변수(cont
모터 확인용
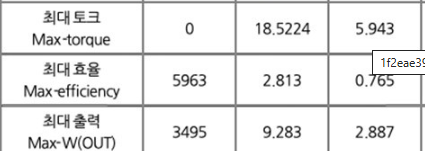
그냥 끄적이고 싶어서 적는용감속비 : 감속기어를통해 모터의엔진의 입력 회전 속도를 얼마나 줄여서 출력하는지를 나타내는 비율 즉 이거를 하면 기본 모터 단독 스펙에 rpm 자체가 1/14로 줄어들게 됨허용 부화 : kg/cm 인데 이게 작동하고 나서 유지하는 힘을 기입순

6603_로또
예제 입력 1 7 1 2 3 4 5 6 78 1 2 3 5 8 13 21 340예제 출력 1 1 2 3 4 5 61 2 3 4 5 71 2 3 4 6 71 2 3 5 6 71 2 4 5 6 71 3 4 5 6 72 3 4 5 6 71 2 3 5 8 131 2 3 5 8
10971_왼판원 순회2(포인터 배열공부)
예제 입력 1 4 0 10 15 20 5 0 9 10 6 13 0 12 8 8 9 0 예제 출력 1 35 Study code 2차원 배열을 만들어야 하는데 vector와 포인터 중에 뭐를 쓸지 고민했음 그래서 오래간만에 포인터를 활용하여 2차원 배열을 만들고자 했

10819_차이를 최대로
예제 입력 1 620 1 15 8 4 10예제 출력 1 62저기 절대값이 있다는것을 순간적으로 몰라서 멍때리다가 절대값이라길래 아하 하고 풀었음next_permutation을 활용하였고 저번과 같이 배열을 sort를 하여 순서대로 하고 수식을 넣어 하나하나 비교하면서
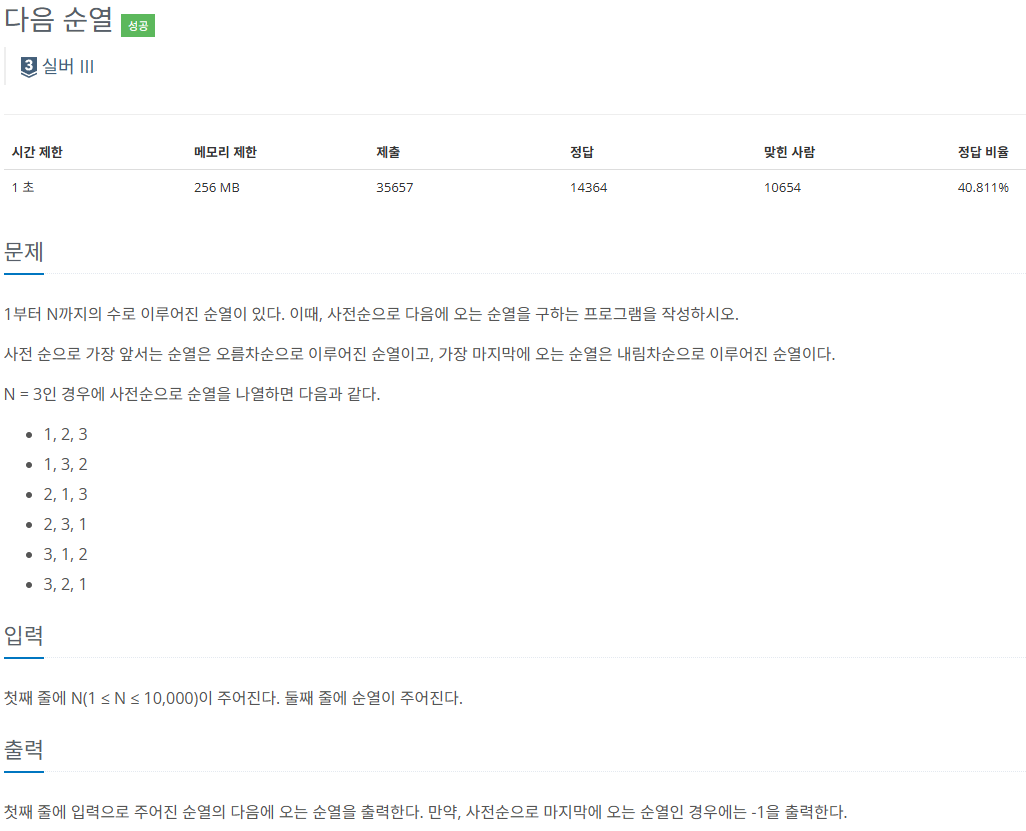
10972_다음 순열
예제 입력 1 41 2 3 4예제 출력 1 1 2 4 3예제 입력 2 55 4 3 2 1예제 출력 2 \-1next_permutation를 배웠는데 이는 순열의 다음것을 출력해주는것임이는 algorithm을 활용하면 \`\`\` if(next_permutation(g

1248_guess(어렵구만)
예제 입력 1 4\-+0++++--+예제 출력 1 \-2 5 -3 1예제 입력 2 2\+++예제 출력 2 3 4예제 입력 3 5\++0+-+-+--+-+--예제 출력 3 1 2 -3 4 -5해당 코드를 공부하면서 시간을 많이 쓴것 같음허나재귀 파트의 마지막 문제라서 조
2529_부등호
예제 입력 1 2 예제 출력 1 897 021 예제 입력 2 9 > > > < < 예제 출력 2 9567843012 1023765489 공부노트 bool check(char bigsmall,int fnum,int sec_num)\ 처음에는 해당 부분에서 b
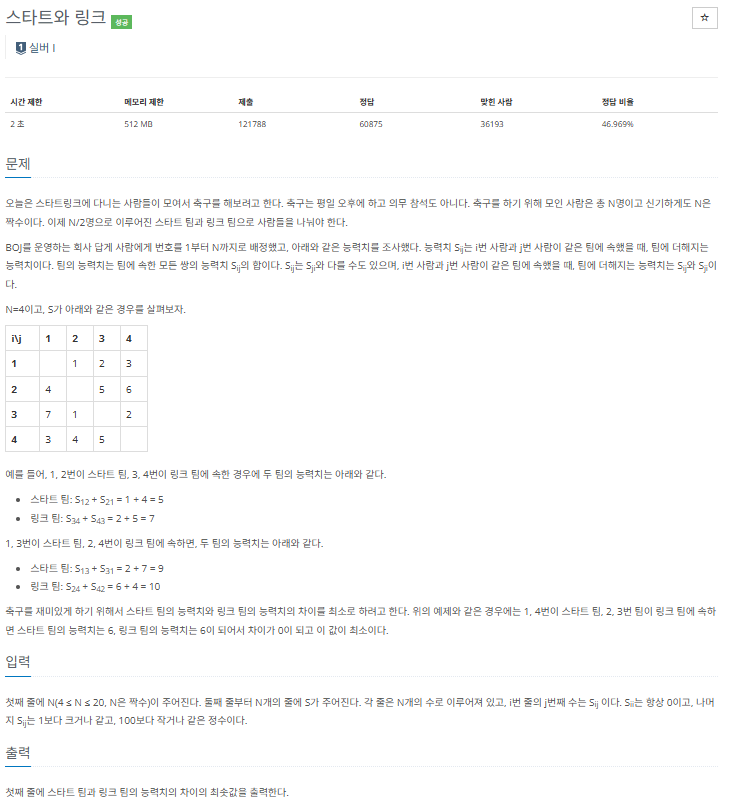
14889,15661_스타트와 링크 및 링크와 스타트
예제 입력 1 40 1 2 34 0 5 67 1 0 23 4 5 0예제 출력 1 0예제 입력 2 60 1 2 3 4 51 0 2 3 4 51 2 0 3 4 51 2 3 0 4 51 2 3 4 0 51 2 3 4 5 0예제 출력 2 2예제 입력 3 80 5 4 5 4 5
14501_퇴사
예제 입력 1 7 3 10 5 20 1 10 1 20 2 15 4 40 2 200 예제 출력 1 45 예제 입력 2 10 1 1 1 2 1 3 1 4 1 5 1 6 1 7 1 8 1 9 1 10 예제 출력 2 55 예제 입력 3 10 5 10 5 9 5 8 5
15655_n&m(6)
예제 입력 1 3 1 4 5 2 예제 출력 1 2 4 5 예제 입력 2 4 2 9 8 7 1 예제 출력 2 1 7 1 8 1 9 7 8 7 9 8 9 예제 입력 3 4 4 1231 1232 1233 1234 예제 출력 3 1231 1232 1233 1234 개
다른 PC와 SSH 연결 및 원격제어
이는 타 pc에 연결할때 내가 보면서 하고 싶어서 만든 것임ㅋ이는 같은 와이파이상에서 하는 경우를 설명함나는 wsl에서 접속한지라 wsl이 적혀있음sudo apt updatesudo apt install openssh-server -y있는 지 확인하는법\->which
1759_암호만들기
예제 입력 1 4 6 a t c i s w 예제 출력 1 acis acit aciw acst acsw actw aist aisw aitw astw cist cisw citw istw 개념정리 push_back push_back이란 vector에서 뒤에 자리에 숫
15654_N과 M(5)
예제 입력 1 3 1 4 5 2 예제 출력 1 2 4 5 예제 입력 2 4 2 9 8 7 1 예제 출력 2 1 7 1 8 1 9 7 1 7 8 7 9 8 1 8 7 8 9 9 1 9 7 9 8 예제 입력 3 4 4 1231 1232 1233 1234 예제 출력