ROS1
1.[ROS] ROS1 소개문

이제부터 ROS에 대해서 본격적으로 공부해보자. 우선 ROS1 위주로 공부하고, ROS2를 필요하다면 추가적으로 공부해서 정리한다.본 ROS 시리즈 포스팅은https://wiki.ros.org/ROS/Tutorialshttps://cafe.naver.
2.[ROS] ROS Noetic을 설치해보자 (Ubuntu 20.04)
이번 포스팅에는 ROS1 Noetic을 Ubuntu 20.04 LTS에 설치하는 방법에 대해서 알아보자.💡 Ubuntu 20.04 LTS는 WSL2로 사용하거나, 혹은 Ubuntu 싱글 부팅을 하는 것 어느 쪽이든 무방하다. 본인은 WSL2와 Ubuntu 싱글 부팅
3.[ROS] ROS란 대체 무엇일까?
이번에는 ROS를 설치했으니, 당연한 수순으로 ROS가 무엇인지에 대해서 짧게 공부해보는 시간을 가지도록 하자.ROS 관련 가장 공신력 있는 레퍼런스인 ROS 위키에서는 ROS를 다음과 같이 소개하고 있다.https://wiki.ros.org/ROS/Intro
4.[ROS] ROS의 파일 시스템
이번에는 ROS의 파일 시스템에 대해서 알아보도록 하자.참고한 링크는 다음과 같다.https://cafe.naver.com/openrt/2500https://wiki.ros.org/ROS/Tutorials/NavigatingTheFilesystem&l
5.[ROS] ROS의 빌드 시스템, 패키지 빌드

이번에는 ROS의 빌드 시스템에 대해서 이해하고, 실제로 패키지를 생성 및 빌드해보도록 하자.작성에 사용한 링크는 다음과 같다.https://cafe.naver.com/openrt/2585https://wiki.ros.org/ROS/Tutorials
6.[ROS] ROS의 핵심 용어
이번 용어들을 공부하면서 보고 배운 링크는 다음과 같다. https://cafe.naver.com/openrt/2466 > 🚀 * ROS * 로봇 응용 프로그램 개발을 위한 운영체제와 같은 로봇 플랫폼이다. > 🚀 * 마스터(master) * 마스터는 노드와
7.[ROS] 기본적인 개념 정리
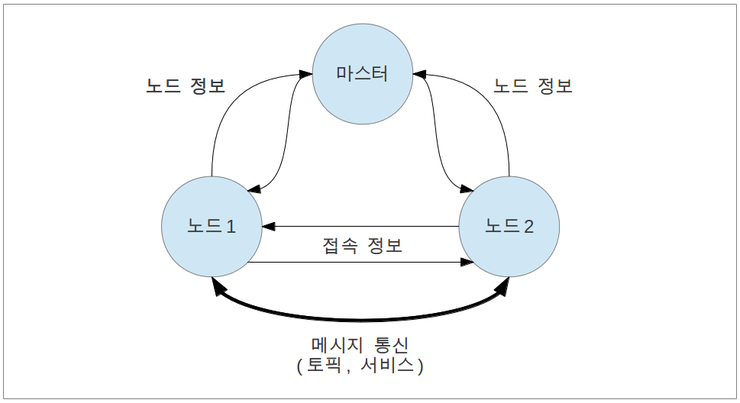
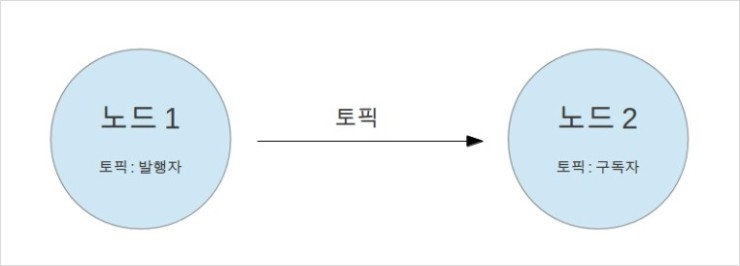
이번에는 용어 정리에 이어서 ROS가 어떻게 구동되는지에 대해서 관련된 개념들을 정리해보자. 1. 메시지 통신
8.[ROS] 쉘(shell, 터미널) 명령어
지난 포스팅까지 ROS의 기본적인 개념과 원리에 대해서 공부를 하였다(물론 파일 시스템을 다룰 때 ROS 쉘 명령어의 일부인 rospack, roscd, rosls 등에 대해서도 다루긴 했다). 따라서 이번 포스팅부터는 본격적으로 ROS에서 사용되는 명령어들에 대해서
9.[ROS] 마스터, 노드 등 실행 명령어
이번에는 마스터, 노드, launch 파일 등 다양한 ROS의 파일이나 시스템을 실행하는 명령어들에 대해서 알아보자. roscore, roslaunch, rosrun, rosclean 정도가 있다.참고한 링크는 다음과 같다.https://cafe.naver.c
10.[ROS] ROS Node와, 관련 명령어를 알아보자
이번에는 ROS의 노드와 관련 명령어에 대해서 알아보자.💡 ROS 노드(node)란?ROS에서의 노드는 최소 단위의 실행 가능한 프로그램 혹은 프로세스라고 이해하면 된다. ROS의 최소 단위로 노드가 모여서 패키지를 구성하고, 패키지가 모여서 메타-패키지를 구성하게
11.[ROS] 토픽(topic)과 관련된 명령어들
이번 페이지에는 ROS 토픽(topic)과 관련된 명령어들에 대해서 알아볼 것이다. 참고한 링크는 다음과 같다.https://cafe.naver.com/openrt/2832https://wiki.ros.org/ROS/Tutorials/Understan
12.[ROS] ROS 서비스(service), 관련 명령어 공부
이번에는 토픽에 이어서 서비스와 관련된 명령어에 대해서 알아보도족 하자.참조한 링크는 다음과 같다.https://cafe.naver.com/openrt/2833https://wiki.ros.org/ROS/Tutorials/UnderstandingSer
13.[ROS] ROS 파라미터(parameter)와 관련 명령어들
이번 포스팅에서는 ROS 파라미터, 매개변수들을 다루는 명령어에 대해서 알아보도록 하자.참고한 링크는 다음과 같다.https://cafe.naver.com/openrt/2845https://wiki.ros.org/ROS/Tutorials/Underst
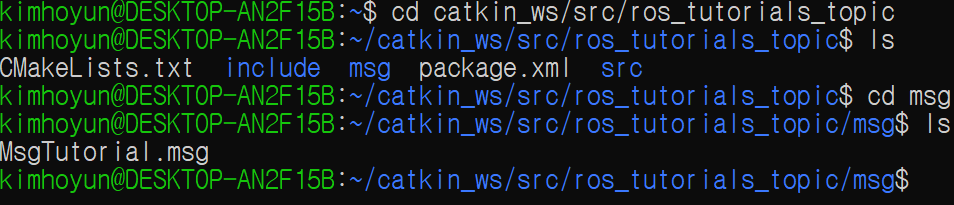
14.[ROS] ROS 메시지(message)와 관련된 명령어
이번에는 ROS의 메시지(message)와 관련된 명령어를 공부해보도록 하자.참고한 링크는 다음과 같다.https://cafe.naver.com/openrt/2847https://wiki.ros.org/ROS/Tutorials/CreatingMsgAn
15.[ROS] rossrv에 대해서 알아보자
참고한 링크는 다음과 같다. https://cafe.naver.com/openrt/2849 https://wiki.ros.org/ROS/Tutorials/CreatingMsgAndSrv srv는 ROS 서비스의 내용을 담고 있는 파일이다. 요청과 응답으로 구성되어 있
16.[ROS] rosbag이란? rosbag 관련 명령어는?
이번에는 ROS에서 파일을 저장하고 재생할 수 있는 bag, 그리고 관련 명령어에 대해서 알아보자..참고한 링크는 다음과 같다.https://cafe.naver.com/openrt/2852https://wiki.ros.org/ROS/Tutorials/
17.[ROS] 유용한 도구, rqt에 대해서 알아보자
이번 포스팅에는 ROS에서 사용할 수 있는 유용한 도구인 rqt에 대해서 알아보자. 공부를 위해서 참고한 링크는 다음과 같다.https://wiki.ros.org/ROS/Tutorials/UsingRqtconsoleRoslaunchhttps://caf
18.[ROS] RViz에 대해서 알아보자
이번에는 rqt에 이은 다른 유용한 툴(tool), RViz에 대해서 알아보자.참고한 링크는 다음과 같다.https://cafe.naver.com/openrt/2950RViz는 ROS의 3차원 시각화(Visualization) 툴로써, ROS 네트워크 상의 데
19.[ROS] ROS 메시지, 토픽, 서비스, 매개변수 복습
이번 포스팅에서는 메시지, 토픽, 서비스, 매개변수를 다시 한번 복습해보자. 이는 본격적으로 패키지를 생성하기 전에 다시금 개념을 짚고 넘어가는 것이다.참고 링크는 다음과 같다.https://velog.io/@hy_k/ROS-%EA%B3%B5%EB%B6%80%
20.[ROS] 커스텀 메시지(msg)와 커스텀 서비스(srv) 생성
이것 역시 예전에 다루었지만, 복습 차원에서 한번 더 공부해보자.참고한 링크는 다음과 같다.https://wiki.ros.org/ROS/Tutorials/CreatingMsgAndSrv💡 ROS 메시지란? 노드 간의 데이터를 주고 받을 때 사용하는 형식으로
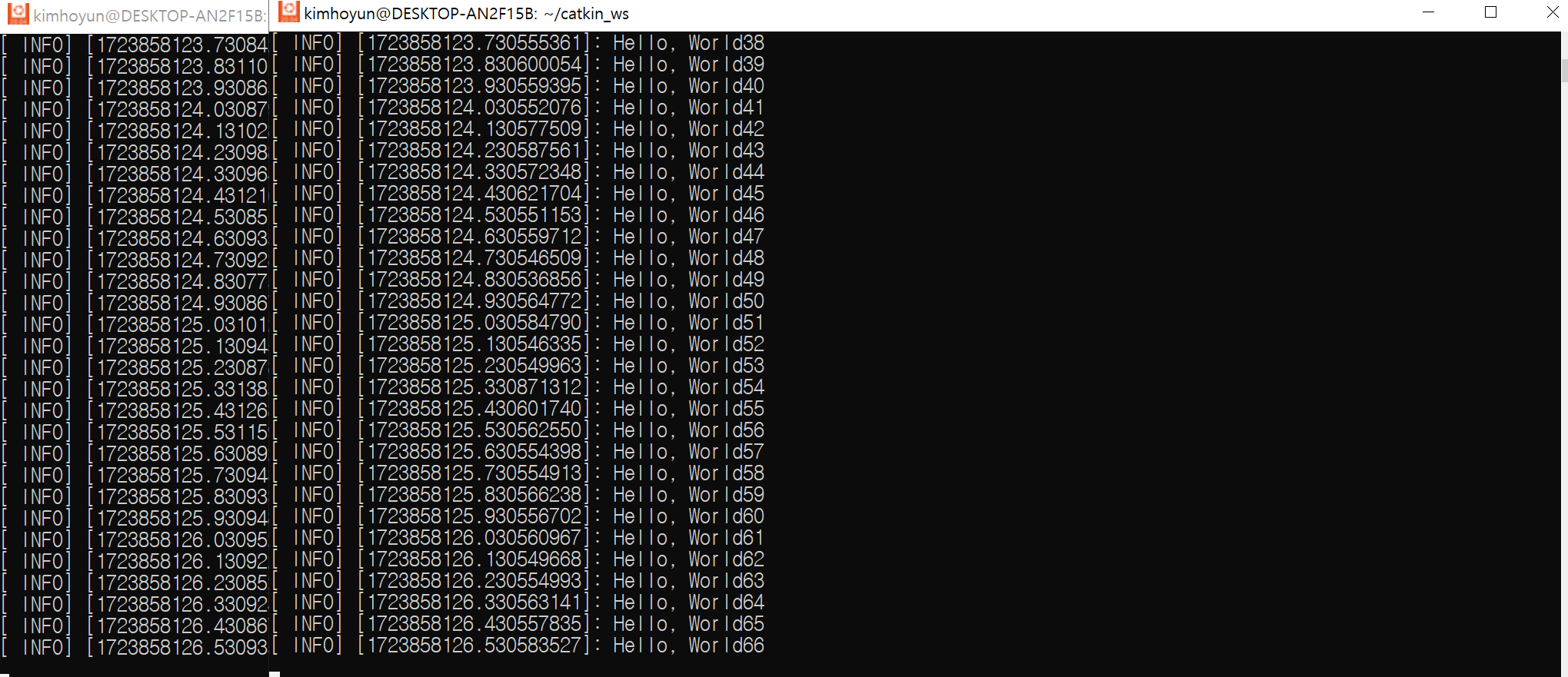
21.[ROS] [C++ 패키지 생성] 토픽을 발행해보자!
이번 포스팅에서는https://cafe.naver.com/openrt/3043https://seansun79.tistory.com/19여기 링크를 참고하여, 토픽을 발행하고 구독하는 패키지를 생성하고, 빌드한 후 실행해보자.의존성 패키지로 std_ms
22.[ROS] C++ 패키지의 main 함수 인자(parameter) 의미
C++로 ROS 패키지를 작성하게 된다면 (당연히) int main() 함수를 사용하게 된다.int main() 함수를 작성하게 되면 다음과 같은 형식으로 작성하게 된다.이번 포스팅에서는 int argc와 char \*\*argv 인자에 대해서 공부해보고자 한다. in
23.[ROS] [C++ 패키지] 토픽을 발행해보자(2)
이번에도 토픽을 주고받는 패키지를 간단하게 만들어보자.많이 만들어봐야 익숙해진다.본인은 ROS2로 시작해서, ROS1의 문법에는 아직 안익숙하다 ^^;;참고한 링크는 다음과 같다.https://wiki.ros.org/ROS/Tutorials/WritingPub
24.[ROS][C++ 패키지] 토픽을 발행해보자(3)
이번 포스팅에도 ROS의 C++ 패키지를 통해서 토픽을 퍼블리시 해보자.참고한 링크는 다음과 같다.https://cafe.naver.com/openrt/3043빌드 및 실행은 이전 포스팅들을 참조해서 하면 된다.
25.[ROS][파이썬 패키지] 토픽을 발행해보자(4)
이번에는 파이썬을 통해서 토픽을 발행하고 구독해보자.참고한 링크는 다음과 같다.https://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber%28python%29C++ 패키지의 경우 src 폴더에 노드를 작성해서
26.[ROS][C++ 패키지] 서비스를 만들어보자
이번 포스팅에서는 C++로 작성된 ROS 서비스 패키지를 만들어보자. 참고한 링크는 다음과 같다.https://wiki.ros.org/ROS/Tutorials/WritingServiceClient%28c%2B%2B%29기존에 쓰던 beginner_tutoria
27.[ROS] [파이썬 패키지] 서비스를 만들어보자(2)
이번 포스팅에서는 저번에 다룬 서비스 패키지를 파이썬으로 작성해보도록 하자. 참고한 링크는 다음과 같다.https://wiki.ros.org/ROS/Tutorials/WritingServiceClient%28python%29오늘도 우리의 패키지 beginner
28.[ROS][C++ 패키지] 서비스를 만들어보자(3)
다시 한번 C++ 패키지로 서비스를 만들어보자.참고한 링크는 다음과 같다.https://cafe.naver.com/openrt/3044이것 역시 저번에 생성한 oroca_ros_tutorials 패키지를 그대로 사용하도록 하자. 다만 CMakeLists.txt
29.[ROS] 시스템 의존성(종속성) 관리
이번에는 ROS Noetic에서 시스템 종속성을 관리하는 방법에 대해서 알아볼 것이다. 참고한 링크는 다음과 같다.https://wiki.ros.org/ROS/Tutorials/rosdepROS Noetic에서 ROS 패키지를 실행하기 위해 필요한 패키지 의존
30.[ROS] 매개변수(parameter) 프로그래밍
이번 포스팅에서는 ROS의 매개변수(parameter, 파라미터) 프로그래밍에 대해서 공부해보자. 참고한 링크는 다음과 같다.https://cafe.naver.com/openrt/3111우선 매개변수가 뭔지부터 다시 복습하자.💡 매개변수(parameter)
31.[ROS] snap과 ROS
이번에는 ROS에서 snap을 공부하고, 사용하는 법에 대해서 익혀보자.참고한 링크는 다음과 같다.https://wiki.ros.org/ROS/Tutorials/Packaging%20your%20ROS%20project%20as%20a%20snap💡 sna
32.[ROS] 나만의 패키지 만들어보기(1)
이번 포스팅에서는 간단한 토픽을 송수신 하는 패키지를 만들고, 빌드하고, 실행시켜보자. C++ 패키지로 작성하였다.자체 msg를 사용하지 않고, std_msgs를 사용하였기 때문에 message_generation이나 message_runtime과 같은 패키지들을 의존
33.[ROS] ROS의 Launch 프로그래밍을 사용해보자
이번에는 다수의 노드를 한번에 실행시킬 수 있는 launch 프로그래밍에 대해서 알아보자. 참고한 링크는 다음과 같다. https://cafe.naver.com/openrt/3113 https://wiki.ros.org/ROS/Tutorials/Roslaunch%20t
34.[ROS] launch 파일의 태그들
이번 포스팅에서는 지난 포스팅에 이어서, roslaunch 프로그래밍을 조금 더 공부해보자. 이번 포스팅에서 다룰 주제는 launch 파일을 작성할 때 사용하는 태그들에 대한 내용이다. 1. launch 태그 launch 태그는 .launch 파일의 root 태그로