
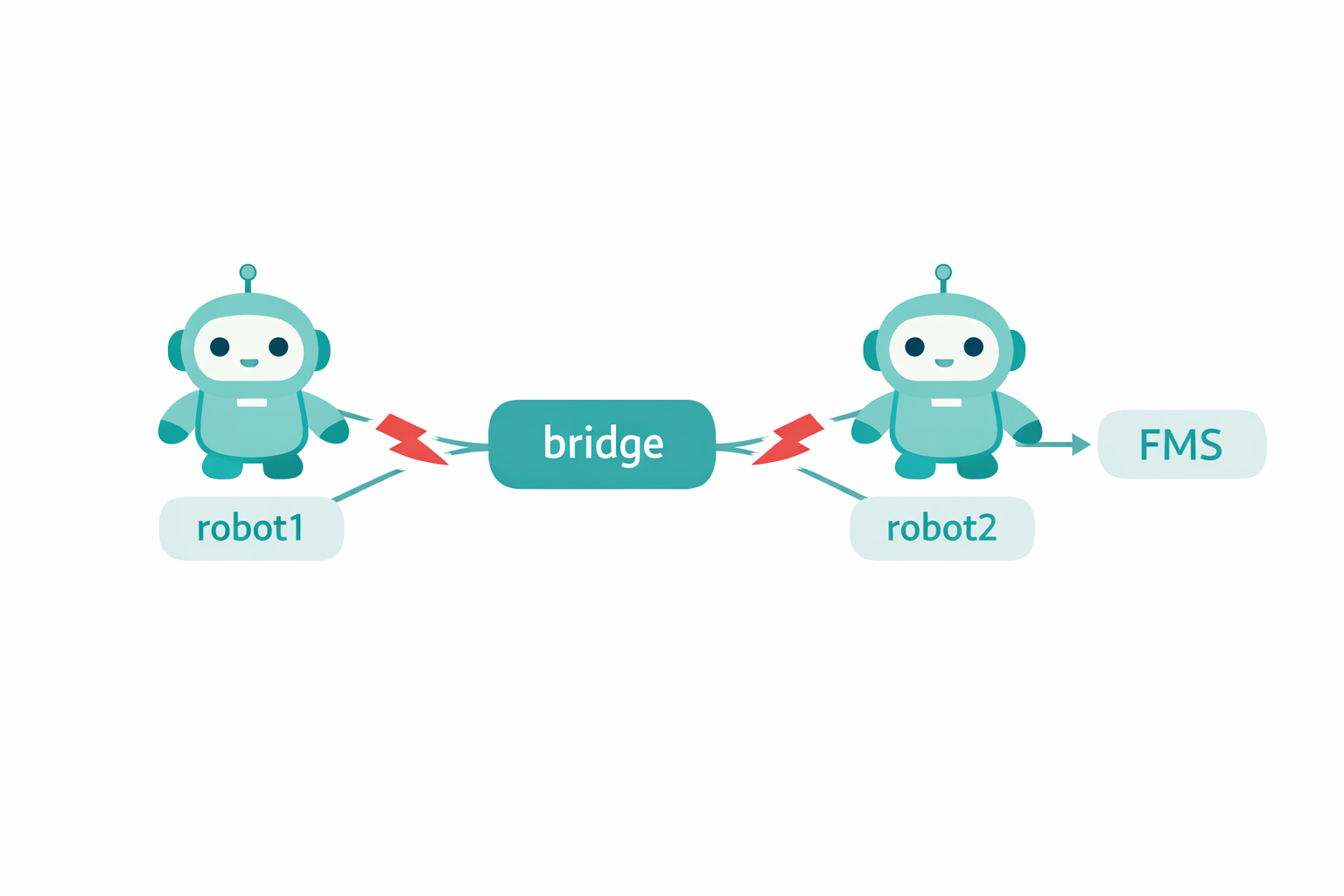
[ROS2] bridge node로 단일로봇 코드를 멀티로봇으로 확장
FMS 구현을 맡으면서 자연스럽게 멀티로봇 환경 구축이 필요해졌다. 팀원들의 단일로봇 코드를 최대한 건드리지 않으면서, bridge node와 namespace로 멀티로봇 시스템을 설계한 과정과 그 과정에서 만난 충돌 문제를 정리했다.
AMCL 삽질: 좀비 프로세스였던 sllidar_node
증상 오늘은 삽질 기록이다. ros2 launch를 실행했는데 AMCL이 map → odom TF를 퍼블리시하지 않는 상황이 발생했다. 에러 로그도 없었다. AMCL 노드는 멀쩡히 떠 있었다. 근데 TF는 없었다. rviz를 열어보면, /map topic에 아무것도 안 뜬다. map → odom이 끊겨 있으니 당연히 로봇 위치도 안 잡히고, Nav...

Nav2의 정밀 도달 한계 극복하기
Nav2만으로 좁은 구간 정밀 도달이 안 됐다. inflation 문제, 로컬 플래너의 한계... 파라미터 튜닝만으론 해결이 없었다. 결국 선택한 건 Nav2 + PID 하이브리드. 원거리는 Nav2, 근거리는 PID로 전환하는 단순한 원칙이 생각보다 잘 동작했다.

AprilTag로 AMCL yaw 재정렬하기
탑뷰 카메라 대신 AprilTag로 AMCL yaw drift를 교정한 구현기. TAG_INFO 방향 혼동, x/y까지 덮어써서 생긴 텔레포트, 검증 도구가 AMCL을 흔들던 문제까지. 삽질 3개와 해결 과정을 정리했습니다.

ROS2 Python 패키지에서 Custom Message 빌드 관련 트러블 슈팅
쇼핑몰 로봇 프로젝트를 진행하면서 로봇과 서버 간 통신을 위한 custom message가 필요했습니다. "Python 패키지니까 msg 파일만 만들면 되겠지?"라고 생각했지만... 현실은 빌드 에러의 연속이었습니다.

ROS2 기반 멀티 컴포넌트 시스템 성능 측정
'프로젝트 시스템에 HTTP 통신이 병목이 될까? UDP를 필수적으로 적용해야 할까?' 통신 방법을 결정하기 위해 성능 측정을 진행했습니다.

[Micro-ROS] ESP32 펌웨어 빌드와 Agent 연결
micro ros는 ROS2의 개념을 MCU 버전에 맞게 줄여서 넣은 버전이라고 생각하면 됩니다.

[회고] 빵 자동 스캐너와 매장 모니터링 프로젝트
이 글은 딥러닝 기반 무인 키오스크 및 매장 모니터링 시스템을 구현한 프로젝트에 대한 회고입니다. 기술적인 결과만 나열하기보다는, 프로젝트를 진행하며 어떤 고민을 했고 어떤 선택을 했는지를 중심으로 적어보았습니다.

[ROS2] ROS2의 원리와 통신 방법 정리
ROS1과 ROS2의 차이점, ROS2의 구동 원리, ROS2의 통신 방식과 지원 인터페이스에 대해 정리해봤다.
2025년 회고
2025년은 4년간의 학부 생활이 마무리되던 해였다. 그리고 내가 어떤 개발자가 되고 싶은지, 무엇에 흥미를 느끼는지 확실히 알게 된 한 해이기도 했다.
[모델 설계] 6GB GPU에서 실시간 AI 3종 돌리기
베이커리 키오스크 시스템을 구축하는 중에 3개의 AI 모델을 6GB GPU 메모리 내에서 동시에 돌려야 하는 상황이 생겼습니다. 이 글에선 그 중 폭행 감지 모델을 어떻게 설계하고 최적화했는지 공유합니다.

[GCP] AWS와 GCP의 차이점
AWS를 미리 해본 만큼, GCP에도 빠르게 적응할 수 있으리라고 생각했는데, 막상 해보니 처음 보는 용어가 많더군요... 그래서 AWS와 GCP의 차이점을 정리해봤습니다.
[Arduino] 스텝모터 라이브러리 비교: Stepper vs AccelStepper
아두이노 스텝모터 제어에 사용되는 라이브러리를 비교하고, AccelStepper 라이브러리 사용 방법을 정리해 봤습니다.
[회고] 스마트홈 IoT 프로젝트
기간: 일주일 맡은 기능: 공동현관 기능(스테퍼 모터 - 28BYJ-48, RFID - MFRC522, 초음파 센서), flask 서버 구축 및 GUI와 연동
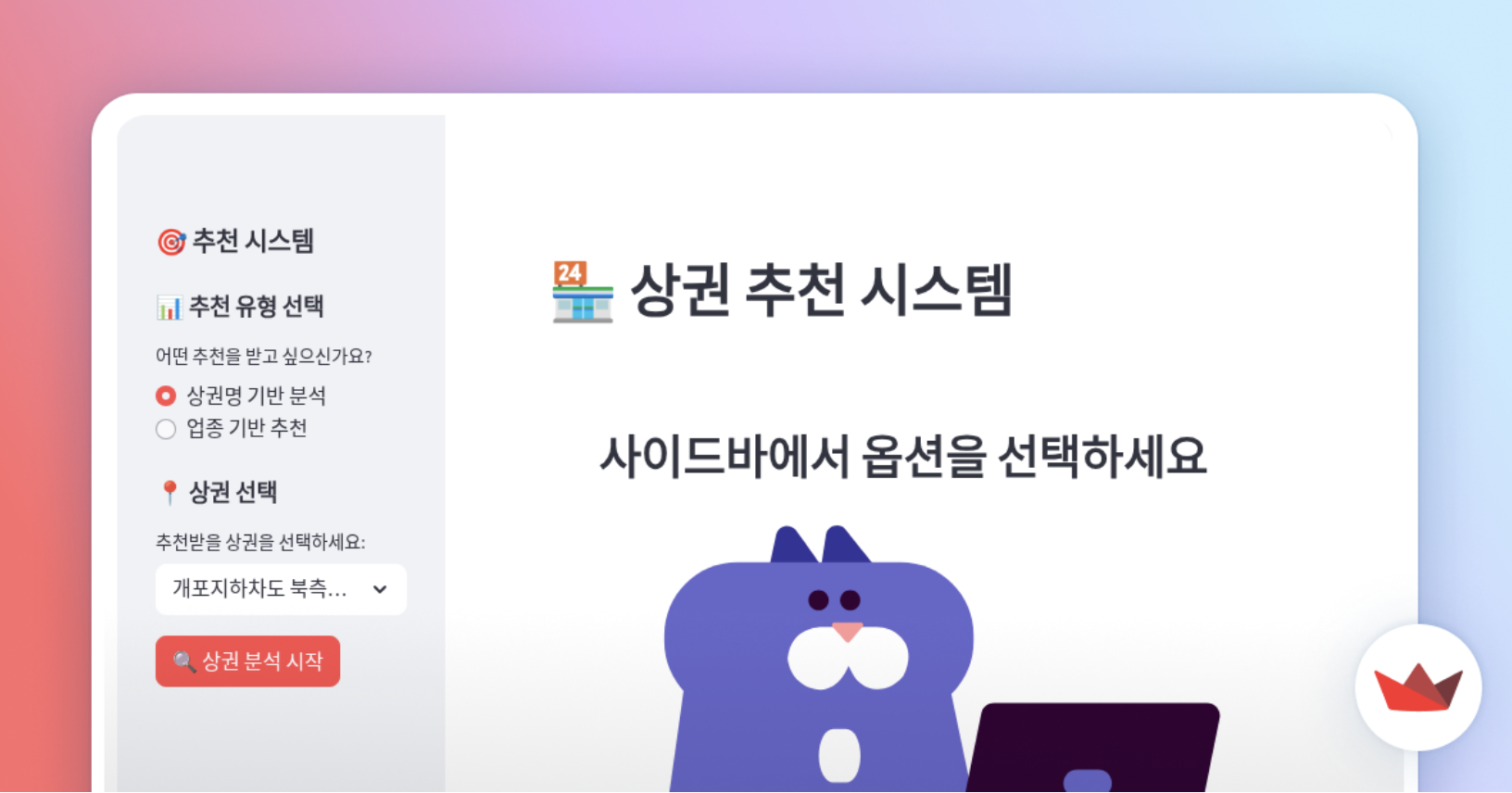
[회고] 서울시 상권 데이터로 요식업 업종/상권 비교하기
부트캠프에서의 첫 프로젝트가 끝났습니다! 사실 끝난지는 좀 됐지만 이제라도 회고를 작성해보네요. 이번 프로젝트의 큰 주제는 EDA였습니다.

[Arduino] 일일 프로젝트 회고 - 엘리베이터 호출 구현
학원에서 아두이노 일일 프로젝트로 엘리베이터 호출을 그대로 구현하는 프로젝트를 진행했다.
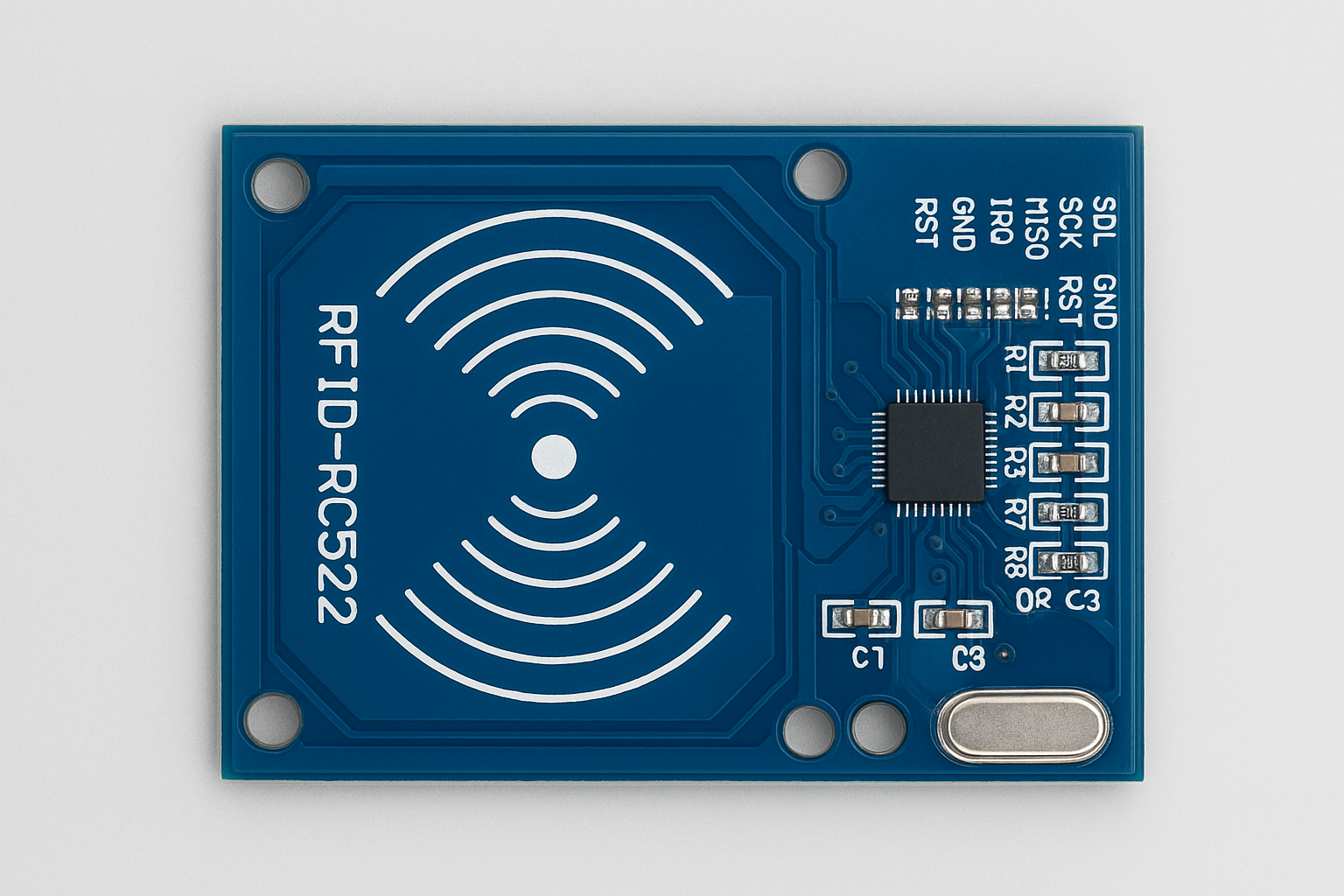
[MCU] RFID를 이용한 태그 인식
이번 글에서는 RFID 기술과 MCU(마이크로컨트롤러)에서 RFID를 다루는 방법을 정리해 봤다. 특히, MFRC522 모듈을 이용해 RFID 태그를 읽고 쓰는 실습을 중심으로 작성했다.

[MCU 개발] PlatformIO IDE를 써보세요
웹개발쟁이한테 Arduino IDE, STM32Cube 등의 MCU 전용 IDE는 너무 불편하다.
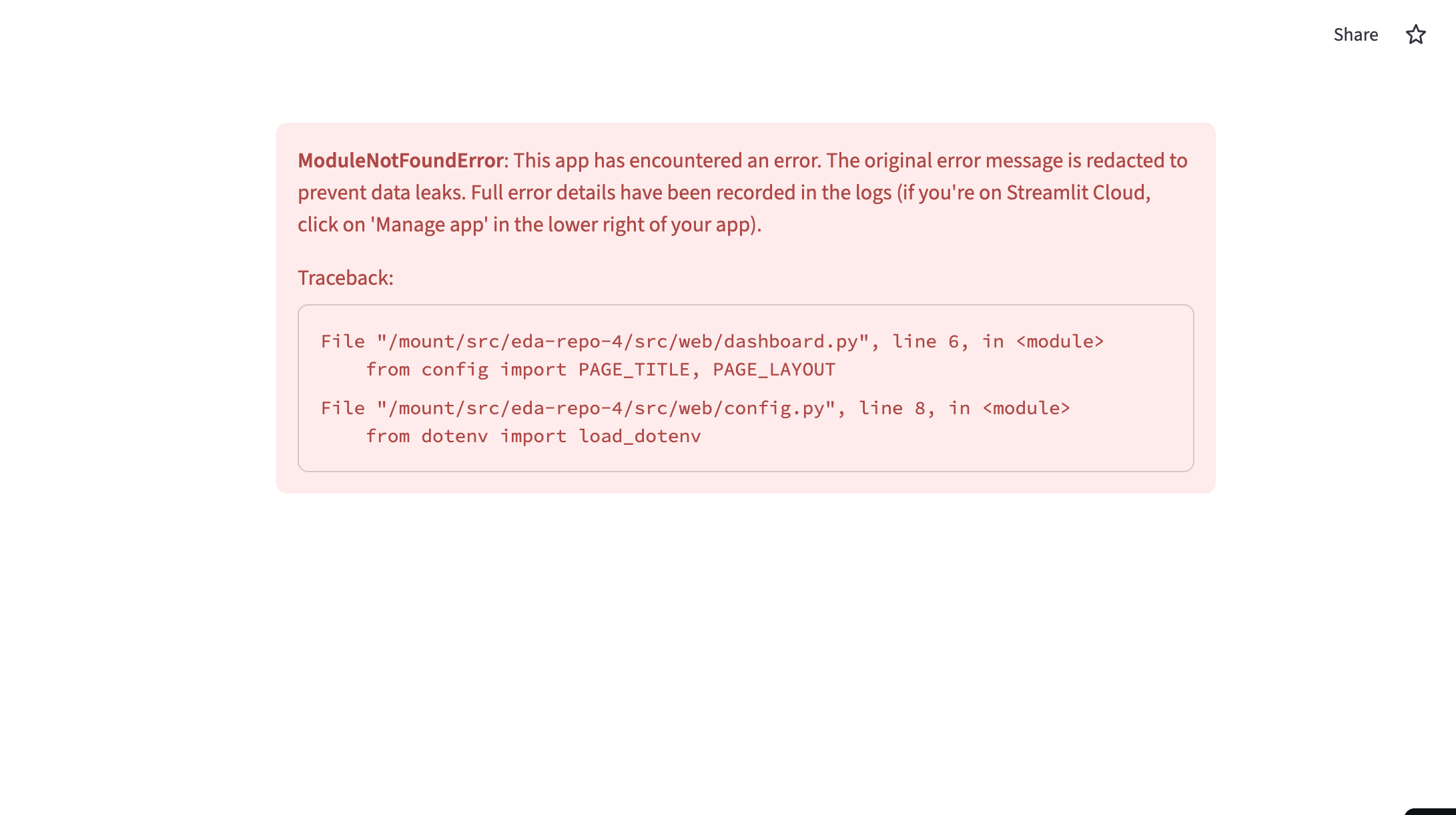
[Streamlit] streamlit cloud 배포 중 import 에러
streamlit cloud로 배포하다가 생긴 import 문제를 해결했습니다.