Nvidia Omniverse Isaac Lab
1.NVIDIA Isaac Lab 첫 시작

로봇 학습을 위한 모듈화된 프레임워크이다. 로봇을 이용한 강화학습, 데모학습등에서 워크플로를 간단하게 제공한다.Isaac Sim을 기반으로 구축되어 있다.모듈성 : 새로운 환경, 로봇, 센서를 쉽게 사용자가 정의하고 추가할 수 있다.커뮤니티 : 커뮤니티의 요구사항을 빠
2.Isaac Lab Installation Guide
Isaac Sim 4.0 부터 pip를 사용하여 Isaac Sim을 설치할 수 있다.pip로 Isaac Sim을 설치하려면 GLIBC 2.34+ 버전이 필요하다. 터미널에서 확인 해준다.가상환경을 만들어서 pip로 설치를 해준다.Isaac Sim 설치하기 전에 최신 p
3.Isaac Lab Tutorial - Interacting with a deformable object
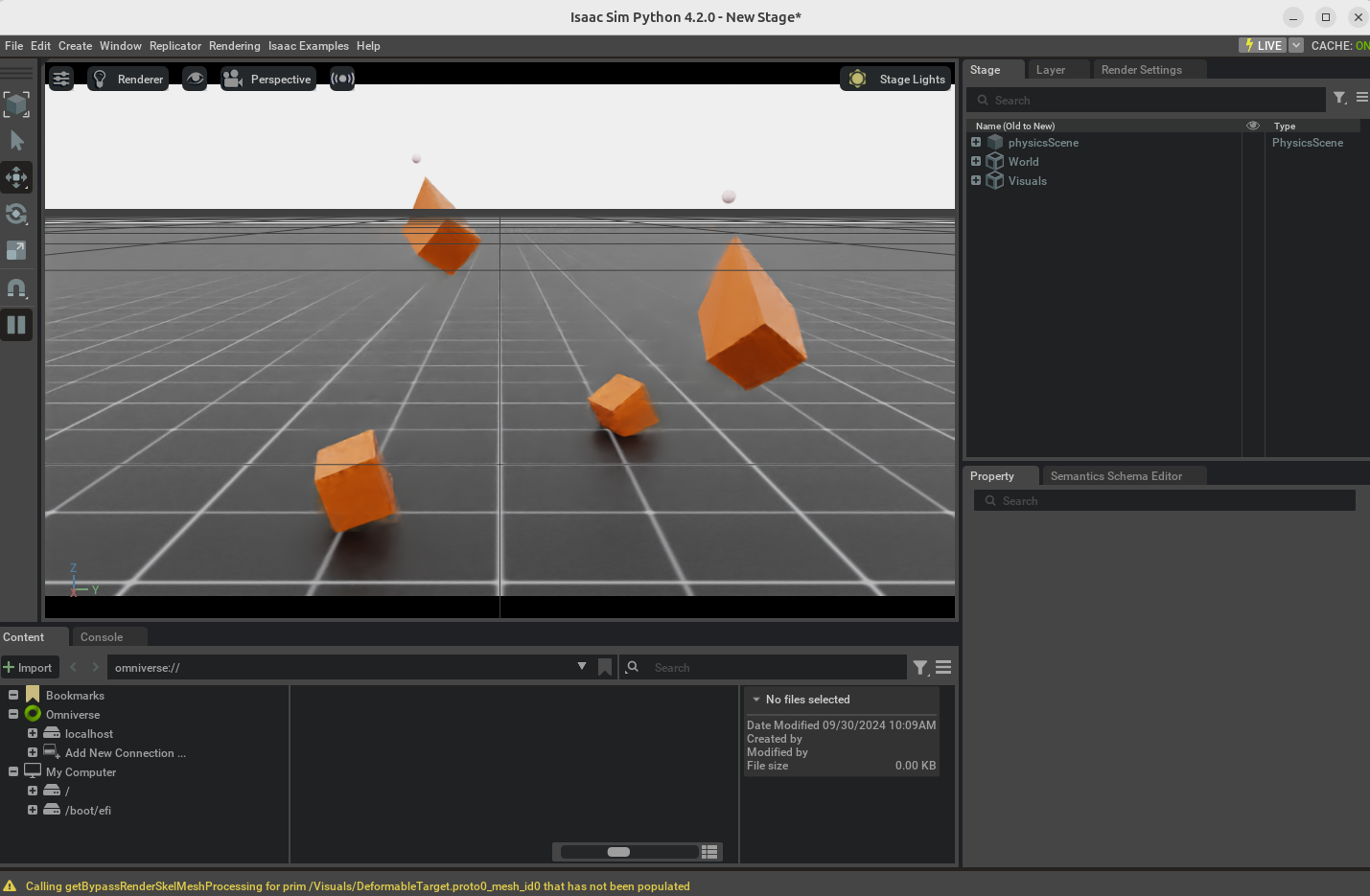
Isaac Lab에서는 정말 다양한 예제를 제공한다.코드와 코드에 대한 자세한 설명도 제공해주기 때문에 정말 좋다. 오늘은 'run_deformable_object.py' 스크립트에 대한 것을 배울것이다.경로는 source/standalone/tutorials/01_a
4.Isaac Lab Tutorial - Creating an empty scene
오늘은 'create_empty.py' 스크립트에 대한 것을 배울것이다.경로는 source/standalone/tutorials/00_sim 에 존재한다.isaaclab 파일에 들어가 터미널을 연 후 가상환경을 설정한다.
5.Isaac Lab Tutorial - Spawning prims into the scene
오늘은 'spawn_prims.py'에 대해서 배워볼것이다.우선 실행을 해보면 다양한 객체들과 물리 법칙이 적용됨을 볼 수 있다.옴니버스의 scene은 USD(Univeral Scene Description)라는 소프트웨어 시스템과 파일 형식을 중식으로 구축된다.USD
6.Isaac Lab Tutorial - Deep-dive into AppLauncher
argpars 라이브러리를 사용하여새 명령줄 인수 '--size'를 스크립트에 추가인수 이름\--size'--' 이중 하이폰은 파이썬에서 선택적 인수를 의미함 (추가 정보 전달)python script.py --size 2.5 를 실행하면 2.5길이의 직육면체가 생성됨
7.Isaac Lab Tutorial - Interacting with a rigid object
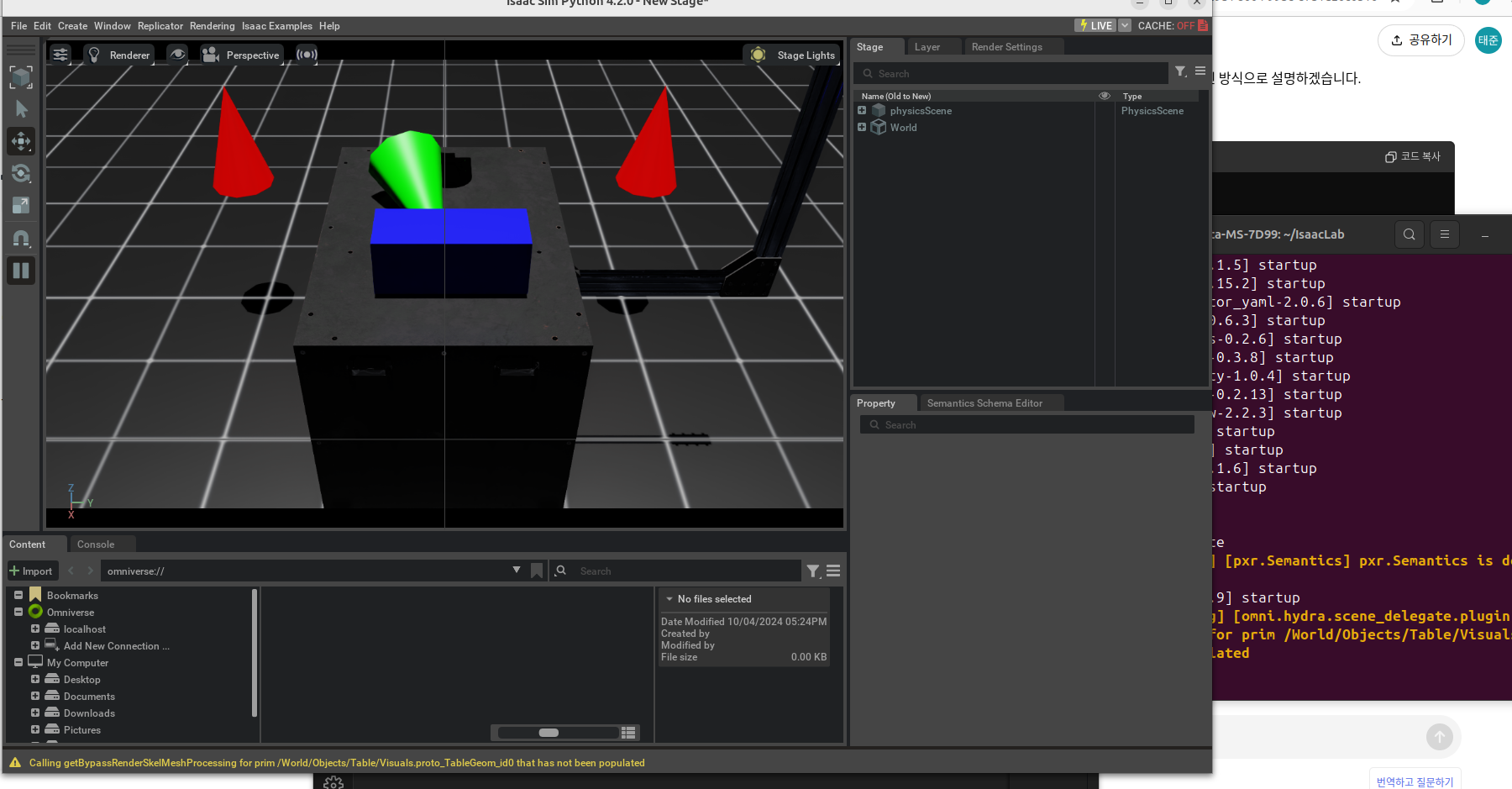
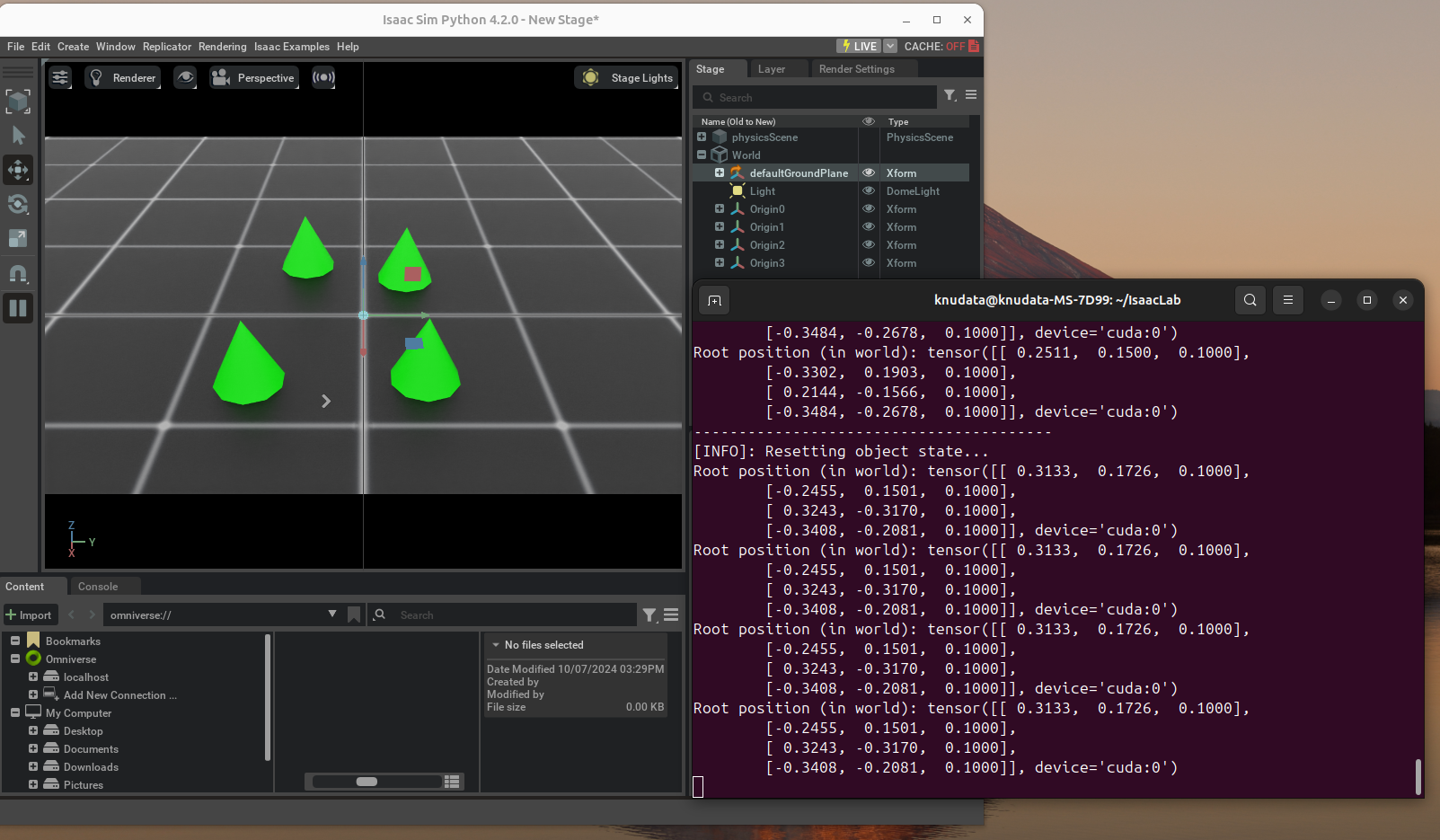
1.RigidObjectCfg() \- 원뿔 강체를 만듦 \- 강체는 변형되지 않고 시뮬레이션에서 힘 및 충돌과 상호작용이 가능2\. prim_path="/World/Origin./Cone" \- 원뿔이 생성될 경로 \- 경로의 ''는 원뿔이 Origin0~
8.Isaac Lab Tutorial - Deep-dive into AppLauncher
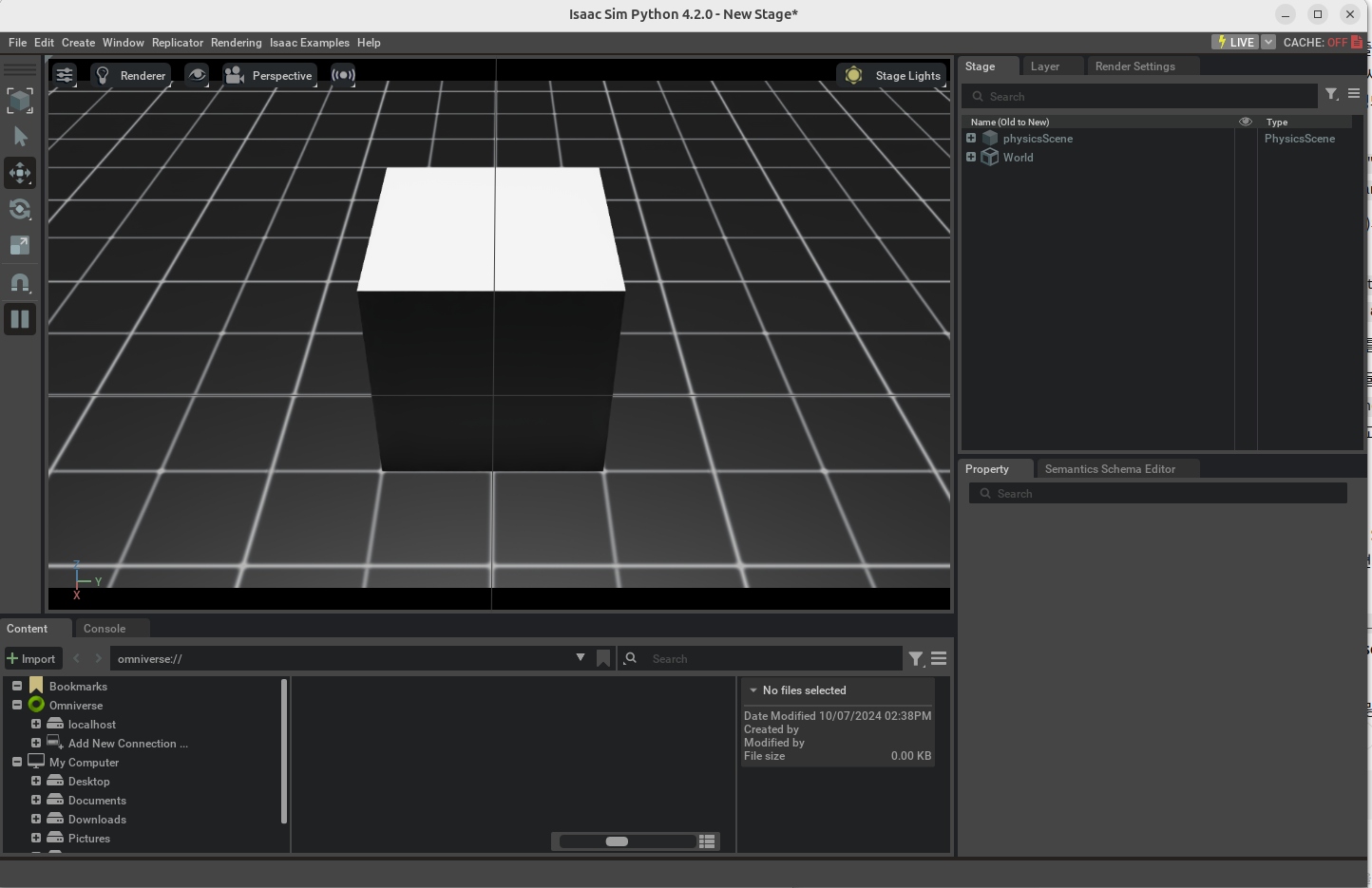
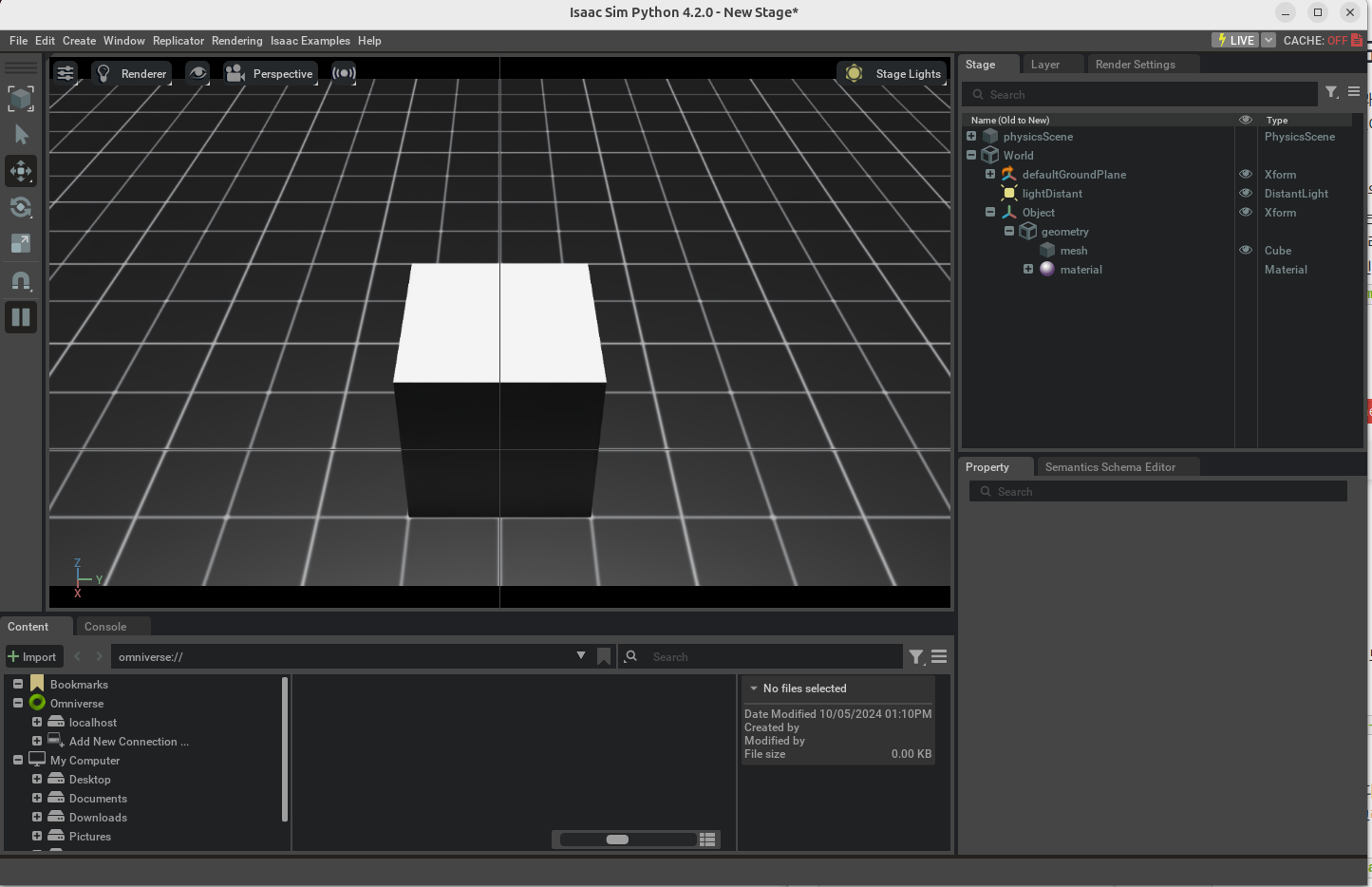
시뮬레이션을 실행해보면 정육면체가 있는 scene이 보인다.물리 효과를 적용하지 않았기 때문에 움직이면 둥둥 떠다닌다.
9.Isaac Lab Tutorial - Interacting with a rigid object
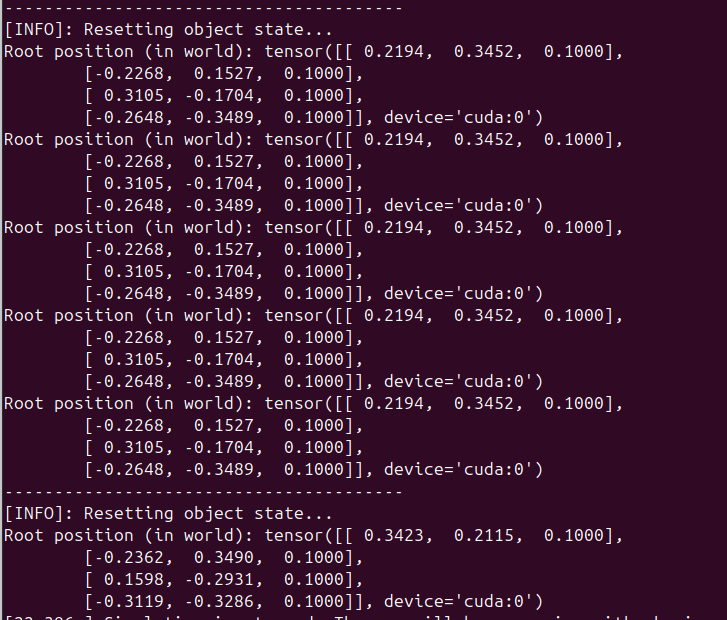
강체와 상호작용을 해보자
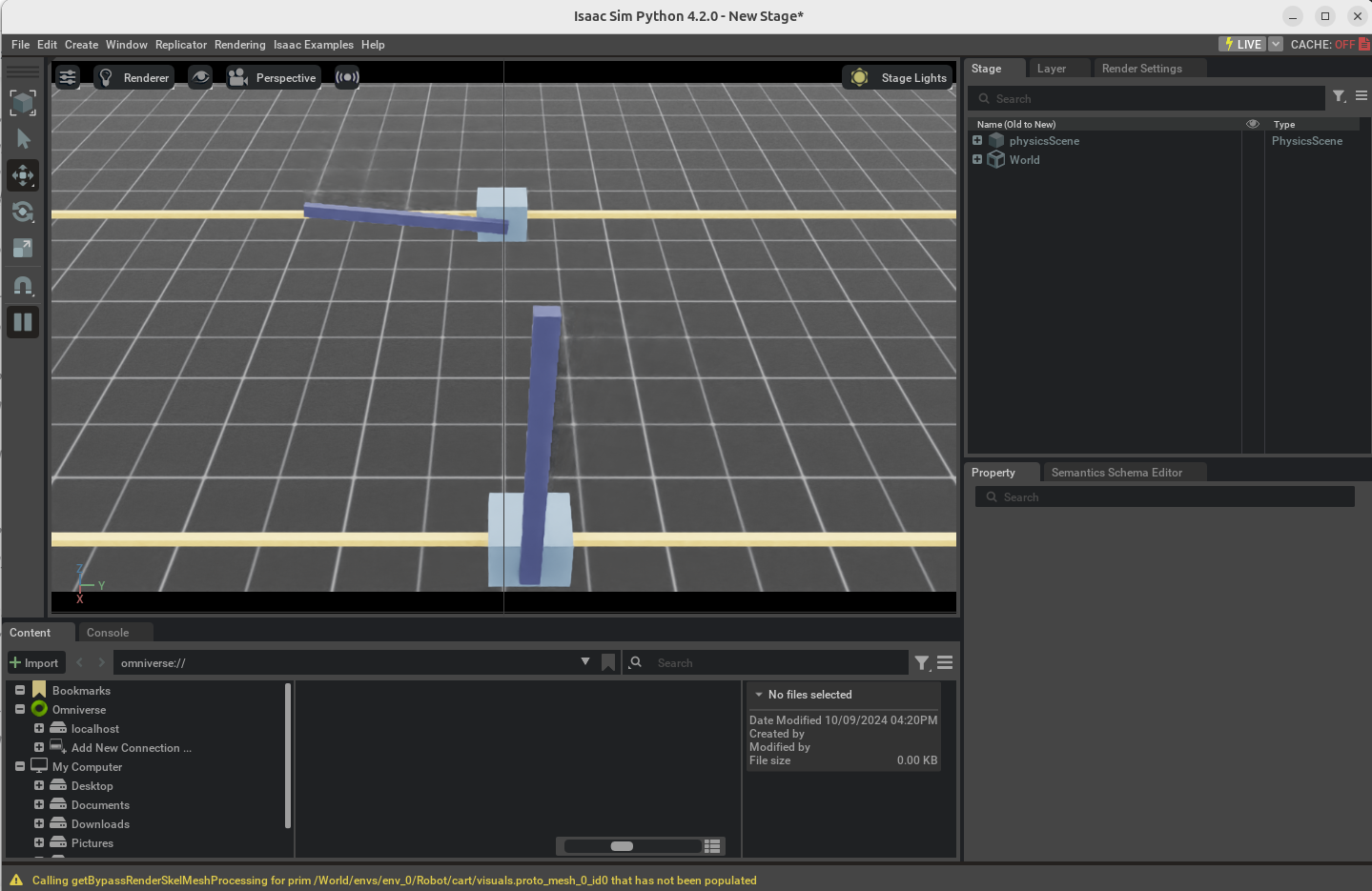
10.Isaac Lab Tutorial - Interacting with an articulation
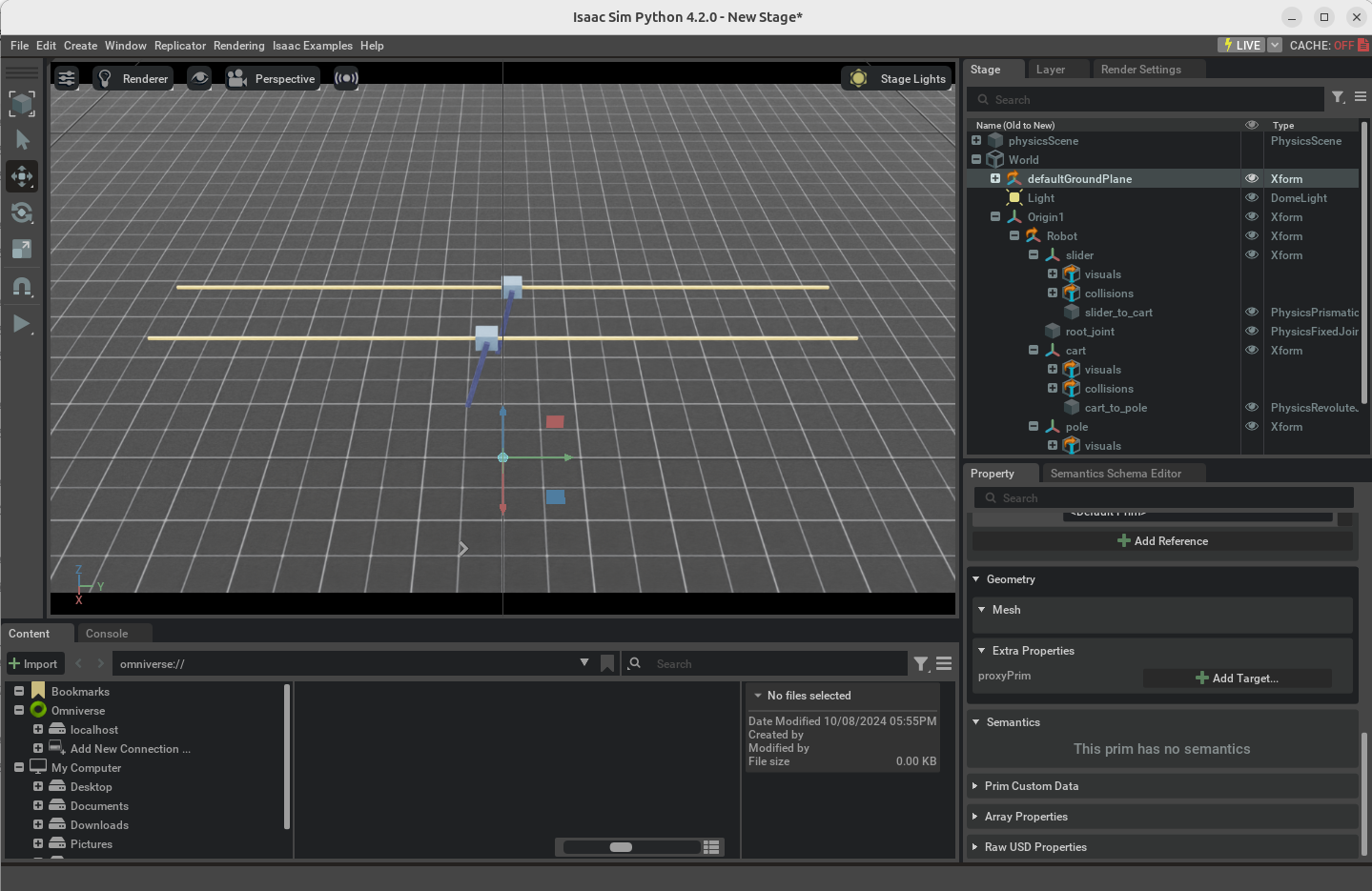
sim: sim_utils.SimulationContext물리 엔진, 시간 흐름, 객체 상태 업데이트 등을 제어하며 시뮬레이션 실행 상태 추적entities: dictstr, Articulationscene내에 존재하는 여러 객체들을 저장한 딕셔너리값임이 딕셔너리를 통
11.Isaac Lab Tutorial - Using the Interactive Scene
지금까지의 튜토리얼에서는 object들을 수동으로 생성하고, 상호작용(물리효과 등)하기 위해 인스턴스를 생성했다.하지만 scene이 복잡해지면 이러한 작업을 수동으로 하는것은 쉽지 않다.이번 튜토리얼에서는 scene.InteractiveScene 을 활용해 prim을
12.Isaac sim - trouble shooting
링크텍스트오류난 파일을 들어가서 위 코드를 없애고이렇게 변경해준다.isaac sim이 4.2 버전이 되면서 어플리케이션을 실행하는 코드가 바뀐듯 하다.하지만 isaac sim 개발자가 모든 튜토리얼의 코드를 바꿀 수 없으니 우리가 이렇게 수정해야 될듯하다.. ㅠㅠ링크텍
13.Isaaclab installation - binaries method
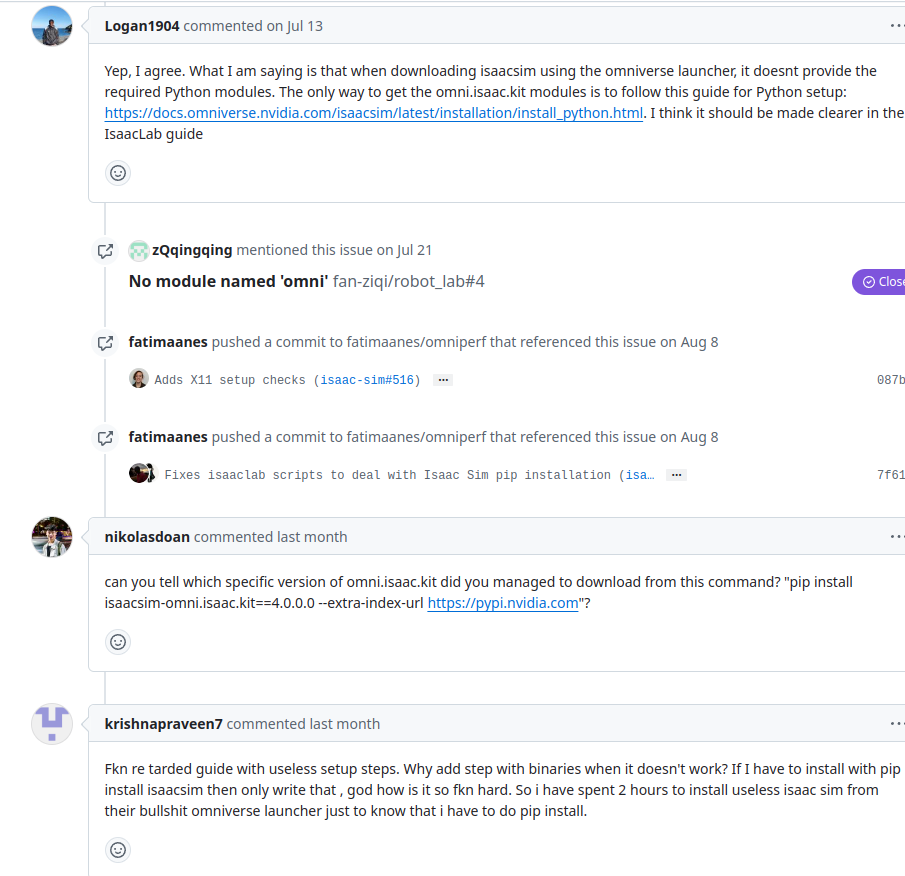
isaaclab 튜토리얼을 돌리는중 RL 부분에서 오류가 생겨서 실행이 안됐다....뭐 찾아보니 호환성 문제인것 같다...튜토리얼 : https://isaac-sim.github.io/IsaacLab/source/tutorials/03_envs/create_m
14.Isaaclab - USD 객체 크기 추출하는 함수

풀 코드가 아닌 부분적인 함수