Object detection
Object detection이란?
classification + Box localization
Two stage detector
R-CNN
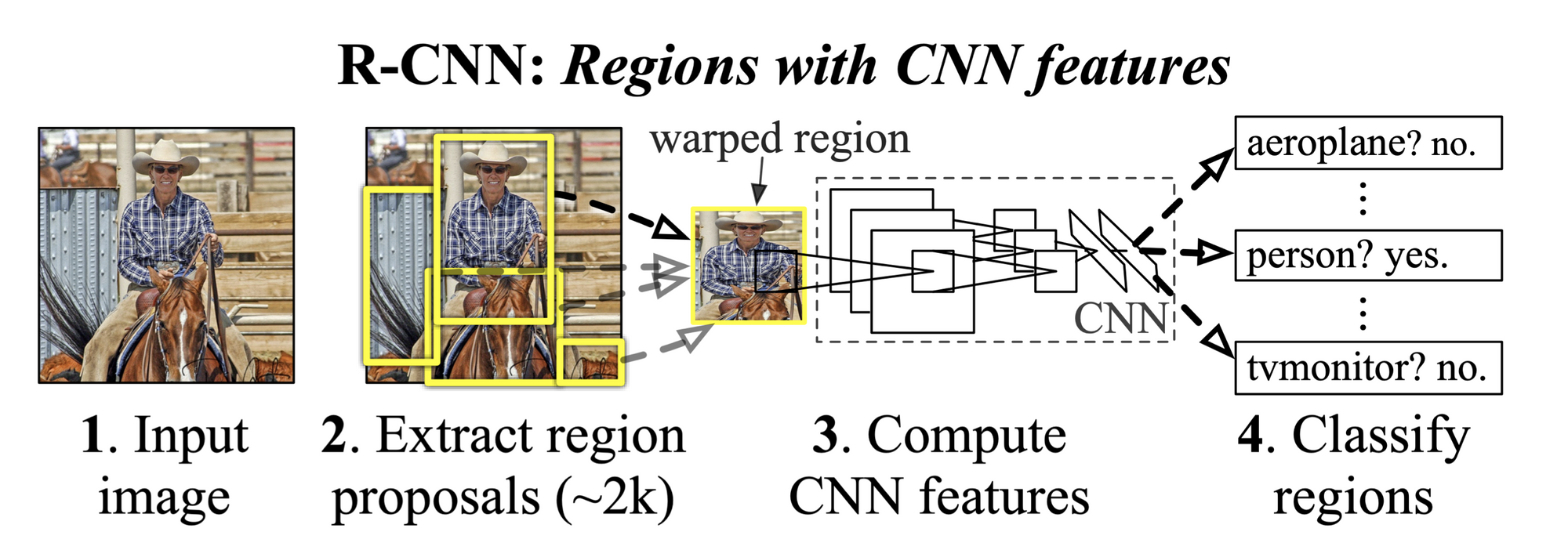
과정
- Input image가 들어온다.
- 미리 나눈 박스 지역을 추출한다.
- 원래 학습된 CNN을 이용하여 feature를 계산한ㄷ
- 지역별로 classify를 한다.
Fast R-CNN
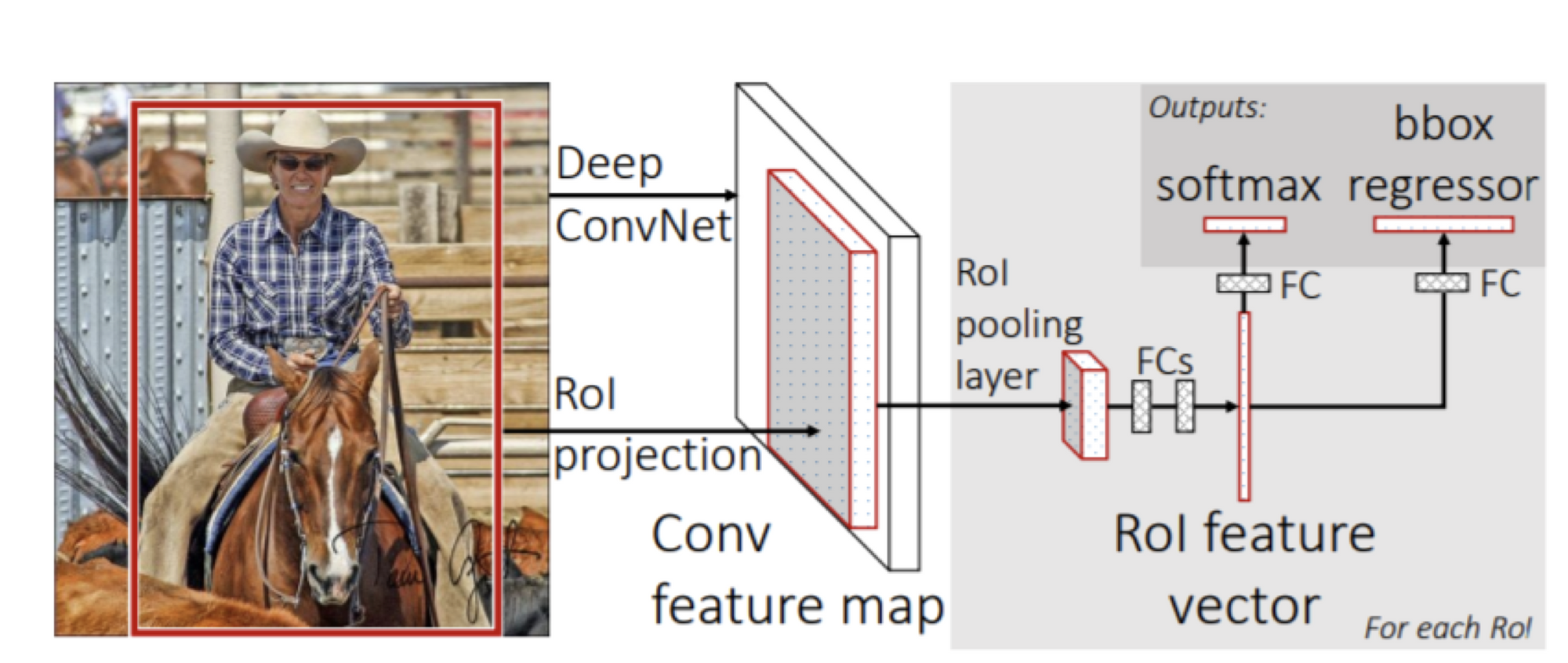
- 원래 이미지로부터 conv feature map을 추출한다.
- ROI(reason of interest) pooling layer로 부터 ROI feature extration을 한다
- 각 ROI feature로부터 class 와 box를 예측한다.
→ region proposal을 selective search와 같은 것을 사용하는 것이 단점이다.
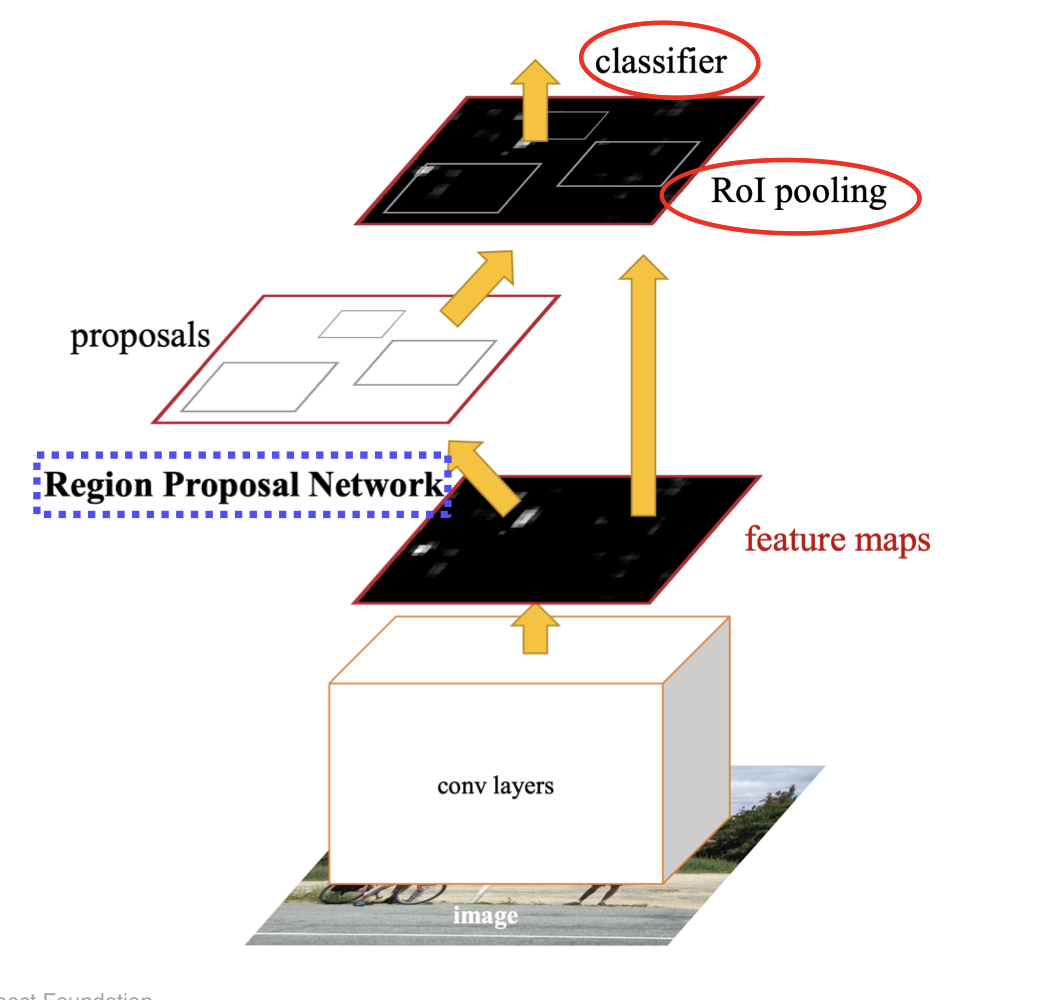
Faster R-CNN
region proposal을 개선하여 selective search에서 Neural Nets 기반으로 대체
→ 처음부터 끝까지 neural net으로 구성됨
특징
- Anchor boxes사용; 미리 rough한 후보군들을 정해둠
- selective search에서 Region Proposal Network(RPN)으로 대체; 영상 하나에서 공유되는 feature map을 뽑아둠
One stage detector
one stage의 특징: 정확도가 떨어지더라도 real time detection이 가능하도록 한다
one stage detector는 region proposal 기반으로 한 roi pooling을 사용하지 않는다
YOLO(You only look once)
{(4개의 좌표)Bounding box, confidence score} + (각 위치마다)Class probability map을 이용하여 object detection을 한다.
SSD(Single Shot MultiBox Detector)
여러 scale의 feature map에서 나온 결과물을 이용해서 여러 possible box shapes를 갖는다. → 각 scale마다 object detection에 결과를 출력하도록 디자인 되어있다. 그리고 각 scale마다 bounding box를 구하고 각 layer에서 parsing된 detection bound box들의 총합을 계산한다.

Study and Share