
AI/ML, Computer Vision
태그 목록
- 전체보기(4)
- cs231a(4)
- Computer Vision(4)
- 3D reconstruction(4)
- Camera(4)

Epipolar Geometry
지금까지 camera calibration 또는 single view metrology를 통해 하나의 이미지로부터 intrinsic and extrinsic parameters를 계산하고 3D 세계에 대한 속성을 도출했다.하지만, 일반적으로 단 한 장의 이미지로부터
2024년 9월 7일
·
0개의 댓글·
0
Single View Metrology
1. Introduction Camera Model에서 우리는 3D world를 digital image로 변환하는 법에 대해 배웠다 카메라 파라미터, Calibration 등 이 강의에서는 카메라의 특성을 알고 있을 때, single image를 통해서 3D
2024년 9월 5일
·
0개의 댓글·
0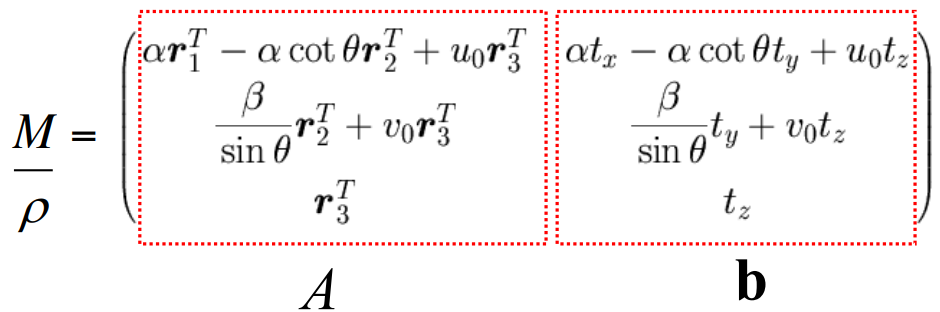
Camera Models 2
5. Camera Calibration 앞 강의를 통해 우리는 3D world에서 digital image로 변환을 위해서는 카메라의 intrinsic, extrinsic parameter을 알아야 함을 배웠다. 하지만 파라미터를 알 수 없는 임의의 카메라로 찍은 이
2024년 9월 1일
·
0개의 댓글·
0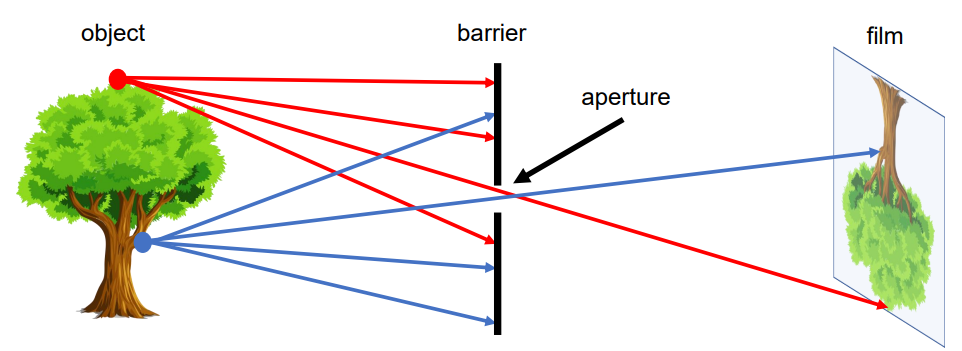
Camera Models 1
카메라는 컴퓨터 비전에서 중요한 도구 중 하나임. 카메라를 어떻게 모델링할 수 있을까?핀홀 카메라의 시스템을 설계해보자. 이는 3D 물체와 사진 필름 및 센서 사이에 작은 구멍 (small aperture)이 있는 barrier을 배치함으로써 설계할 수 있음.3D 물
2024년 8월 25일
·
0개의 댓글·
0