
Waymo Open Motion Dataset (WOMD)
WOMD라고도 부름여섯 도시에서 채집된 로그학습 486 995, 검증 44 097, 테스트 44 920 각 시나리오에는 150m by 150m HD roadgraph가 잘려서 포함되어 있음WOMD 검증·테스트 split에 포함된 (검증 44 097, 테스트 44 92
dasfdsaf
<위 너의 지적>2) Ego 과거(ego_agent_past): 보통 OK(가정 의존)✅/⚠️ ego_agent_pastego는 “항상 존재” 전제라서 보통 무효점 자체가 없다고 가정합니다.work()에서는 ego_agent_past에 대해 별도의 “무효 프레임
time embedding
좋아요. 아래는 \*\*“멀티주파수 연속시간 임베딩 + $dt$ 파라미터화”\*\*가 무엇을 하는지, 왜 좋은지, 수식으로 어떻게 정의되는지, 하이퍼 선택 기준은 무엇인지까지 한 번에 이해할 수 있게 정리한 설명입니다. (전문 용어를 쓰면 바로 옆에 쉬운 뜻도 붙일게요
[metadrive] DiffusionPlannerEnv
종료 조건원래: 목적지 도착 / 최대 스텝 초과 / 차선 이탈 / 충돌(차량/물체/인도) / 사람 이동체 충돌 등추가해야할 것: 최대 스텝 초과하면 끝나도록 (20초?)N개 시나리오를 돌리고, 종료하도록 하기추후: DiffusionPlannerEnv 를 아래 2가지 목
Scenario Dreamer: Vectorized Latent Diffusion for Generating Driving Simulation Environments
scene initialization자율주행 시뮬레이션을 돌릴 때, 제일 처음 시작하는 환경 구성도로: 도로 차선 갯수, 모양, 차선 간 연결 관계 등agent차량/사람/자전거/정적 장애물 등의 초기 상태여기서 초기상태는, 위치/속도/방향/차 크기/종류 를 의미기존 시
Grhfgh
Scenario Dreamer는 자율주행 차량을 위한 시뮬레이션 환경을 완전히 데이터만으로 생성할 수 있는 새로운 방법입니다. 이 모델의 핵심 아이디어와 구성 요소를 최대한 쉬운 말로 풀어 설명하면 다음과 같습니다. • 문제와 목표기존 시뮬레이터들은 • 도로와 차량 정
Deggre
아래 내용은 CVPR 2025에 게재된 “Scenario Dreamer: Vectorized Latent Diffusion for Generating Driving Simulation Environments” 논문을 ‘원문을 보지 않아도 될 정도’로 상세히 풀어 쓴 것
ray VS concurrent.futures.ProcessPoolExecutor
Ray 방식여러 대의 컴퓨터(혹은 여러 개의 CPU 코어)에 작업을 “나눠서” 시켜줍니다.코드에 @ray.remote를 붙이고 ray.get()만 해주면, 내부에서 알아서 작업을 분산 실행해 줍니다.장점여러 대 컴퓨터를 동시에 쓸 수 있어, 처리를 아주 크게 늘릴 수
NVIDIA 드라이버 / CUDA Toolkit / cuDNN
개요 정리하자면 NVIDIA 드라이버: GPU를 컴퓨터가 인식하고 제대로 쓰게 해 주는 필수 프로그램 CUDA Toolkit: GPU에서 일반 계산을 빠르게 돌릴 수 있도록 도와주는 도구 세트 cuDNN: 딥러닝 연산을 더욱 빠르게 해 주는, GPU 전용 최적화 코
[python] multi processing VS threading
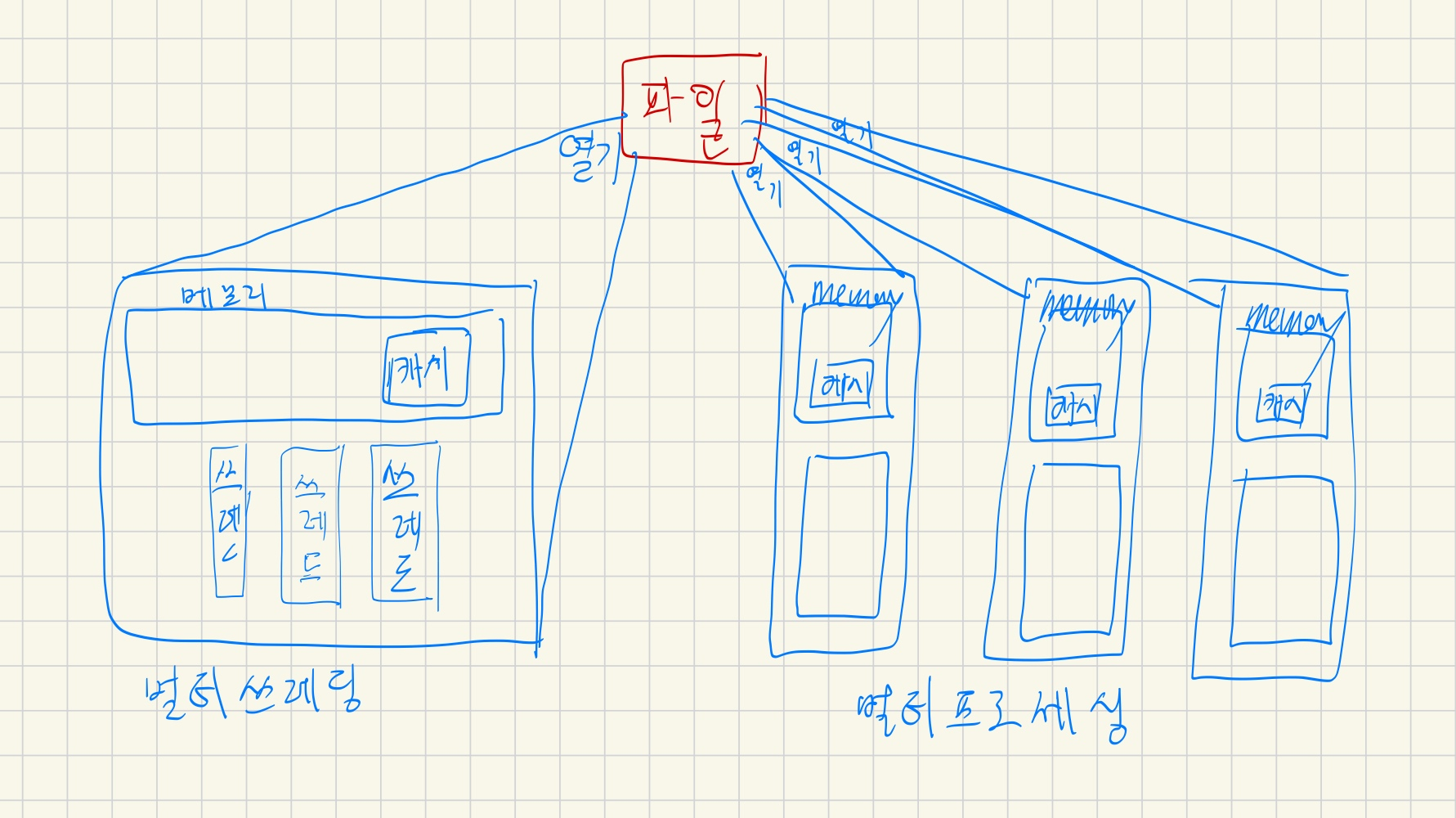
여러 작업자가 같은 파일을 동시에 읽어야 할 때는 멀티스레딩이 더 적합합니다. 한 스레드가 입출력 작업을 기다리는 동안 GIL이 풀리기 때문에, 다른 스레드가 CPU 계산이나 다른 I/O 작업을 계속 수행할 수 있습니다.메모리 공유: 스레드는 하나의 프로그램 안에서 메
DiffusionDrive VS Diffusion Planner
ego와 주변 agents의 multiple 미래 궤적 생성을 위해, 초기 anchors를 기반으로 생성함.인간 운전자는 random distribution이 아닌, 확립된 주행 패턴을 따르므로 합리적 (좌회전 / 직진 / 우회전 / 차선 변경 등)inference 속
MPC VS Multi-modal trajectory IL VS Diffusion
장점안전성 및 설명가능성명시적으로 cost function과 Constraint를 걸 수 있다.단점성능 극대화의 이론적 한계주변 agent trajectory prediction 모듈과, MPC의 cost function이 다르기 떄문에, 각 모듈의 성능을 극대화하는
Trajectory에 속도/가속도/곡률변화 추가하기
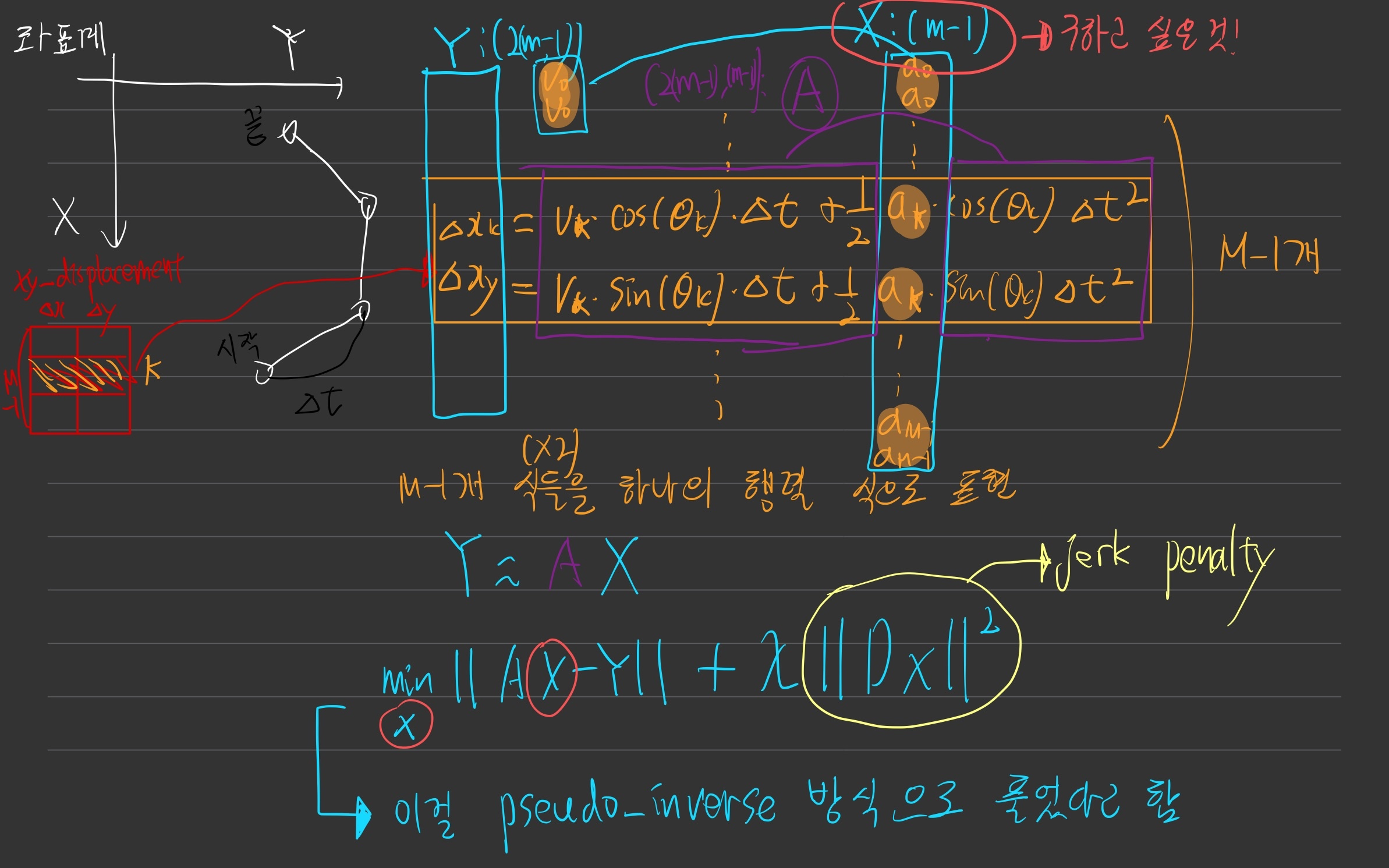
input (주어진 정보)delta t초 간격으로 M개 point의 궤적이 있음.다만, point 당 정보는 x,y,yaw만 있는 상태output (구하고 싶은 것)위 궤적에서, 각 point당 velocity, acceleration 등을 구하고 싶음함수: get_v

Inductive Moment Matching
Abstract 기존 연구에서는 추론 속도를 높이기 위해 두 가지 방법을 사용했습니다. 첫번째 방법: Distillation 목표: 원래 수백 단계의 생성 과정을 몇 단계(few-step)로 압축합니다. 문제점: 한 번에 큰 비선형 변화를 예측해야
DriveArena (클로즈드 루프 생성 시뮬레이션)
데이터 기반 생성 시뮬레이션:DriveArena는 교통 시뮬레이션에 생성 모델 접근법을 도입한 혁신적인 시뮬레이터입니다.이 시스템은 물리적 차량 시뮬레이션을 위한 Traffic Manager와, 생성 기반 비전 모델인 World Dreamer로 구성됩니다.World D
GPUDrive
https://github.com/Emerge-Lab/gpudrive주요 기능 및 능력:GPUDrive는 GPUDrive: Data-driven, multi-agent driving simulation at 1 million FPS(https://ar
Waymax: An Accelerated, Data-Driven Simulator for Large-Scale Autonomous Driving Research
https://github.com/waymo-research/waymax859 starshttps://proceedings.neurips.cc/paper_files/paper/2023/file/1838feeb71c4b4ea524d0df2f7074245
MetaDrive
"절차적 장면 생성 " 이 정확히 무슨 뜻이야?트래픽 차량이 비반응적(ego와 상호작용 제한적) 이라 했는데, 그럼 log-replay 형태야? 반응적 트래픽 차량을 deploy하기 쉽게 구현체가 구현되어있어?MetaDrive 시뮬레이터가 다른 오픈소스 시뮬레이터들과