
- 전체보기(11)
- Unity(7)
- AR(5)
- app(2)
- flutter(1)
- 회로(1)
- Memory Leak(1)
- PyTorch(1)
- LiDAR(1)
- iOS(1)
- Classification(1)
- DeepLearning(1)
- 저주파 통과 필터(1)
- notification(1)
- tqdm(1)
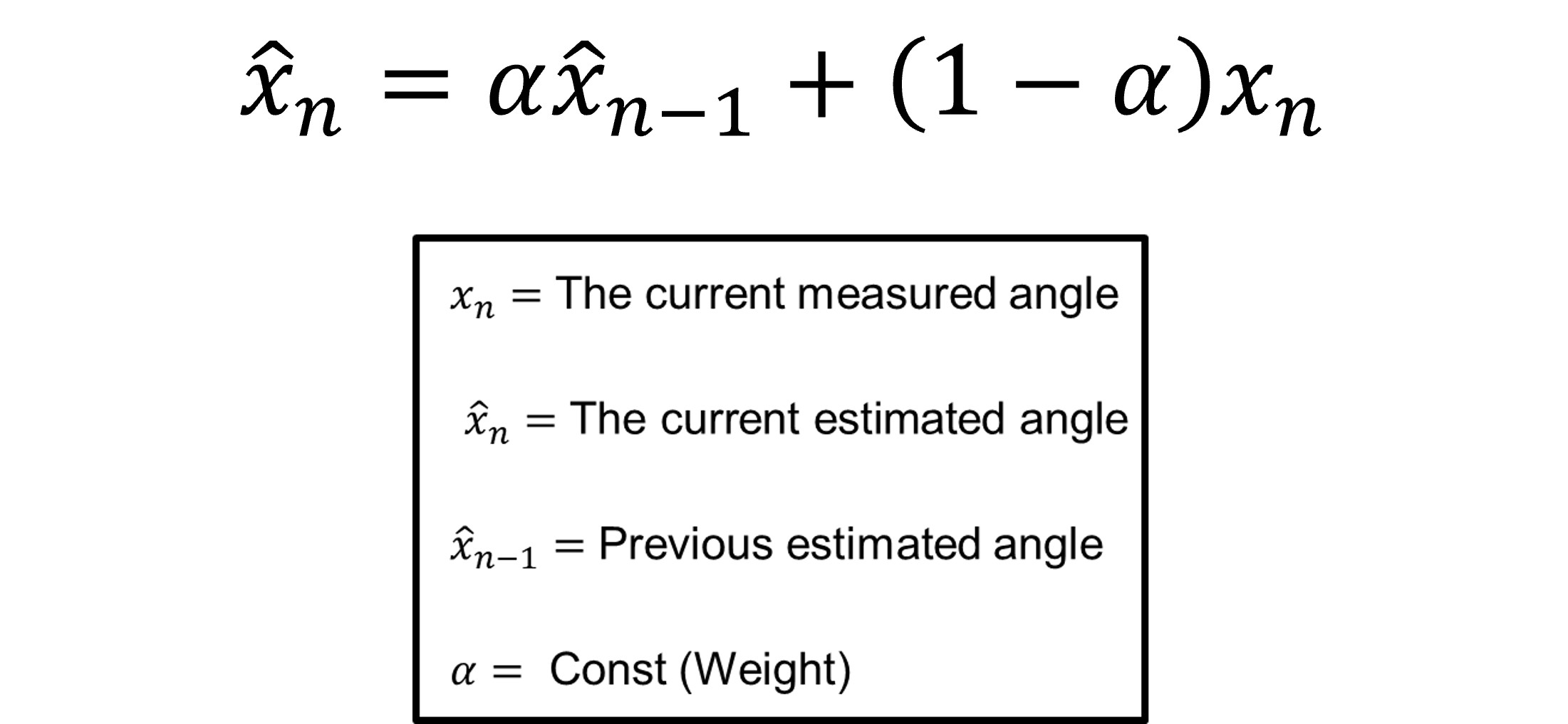
1차 저주파 통과 필터 전개
칼만필터는 어렵지 않아 책을 통해 1차 저주파 통과 필터 내용을 보게 되었습니다.책에 나온 공식은 아래와 같은데 뭔가 의문이 듭니다...? 그래서 어떻게 이 식이 1차 저주파 통과 필터라 불릴 수 있는지 공부를 조금 해봤습니다.먼저 회로 이론에서 사용한 1차 저주파 통

Flutter + Unity AR
이전 글에서 apple의 정책상 background에서 카메라를 쓰지 못하는 것 같다는 말을 했었다. 그러나 background에서 실행시키지 않으면 의미가 없다는 생각을 하며 최선을 방안을 탐색하던 중 불쑥 나타난 그 이름 그렇다면 pip mode란 무엇일까?pip
Unity iOS notification
지금까지 iOS LiDAR를 이용하여 거리를 측정하고 상단의 이미지를 추출하는 것을 진행하였다. 이번에는 거리에 따라 notification 즉 알림을 보내는 기능을 추가하는 방법에 대해 글을 쓰고자 한다.unity에서 notification을 사용하기 위해서는 우선

tqdm 사용
공식 RetinaNet을 학습할 일이 생겨 학습을 진행하며 tqdm으로 학습 진행 상황을 시각화 하려는데 기존에는와 같은 형태의 코드에서 와 같은 형태로 변경하여 학습을 진행하면 학습 시 게이지바가 등장하였는데 이번에 진행할 코드는 로 image와 label을 직접적으

Unity AR iOS LiDAR 활용
이전 글에서 iOS의 LiDAR의 거리값을 가져오는 방법에 대해 적었다. 이번에는 여러 위치의 LiDAR 거리 값을 가져오고 거리가 특정값보다 작을 경우 빨간색으로 나타내는 방법에 대한 글이다.이전의 경우 화면 가운데 위치의 LiDAR값만 가져왔었다. 그러나 좀 더 넓
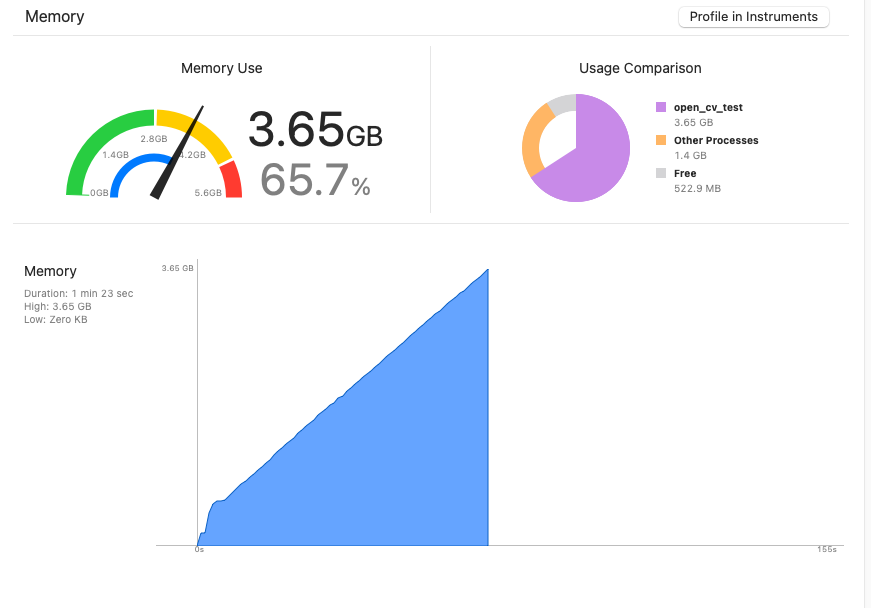
Unity AR 메모리 누수 현상 잡기
현재 Unity를 이용하여 만든 어플의 메모리 사용량과 배터리 사용량을 확인할 필요가 있었다. 어플을 실행하고 Xcode의 부분을 클릭하니 원했던 정보를 확인할 수 있었다. 확인하니 맨 위의 사진과 같이 memory가 끝도없이 상승하는 메모리 누수현상을 발견하였다.
자연상수의 미분
먼저 $f(x)= e^x$인 함수를 도함수로 표기하면$\\displaystyle\\lim{ Δx\\rarr0}{f(x+Δx)-f(x)\\over Δx}$ = $\\displaystyle\\lim{ Δx\\rarr0}{e^{x+Δx} -e^{x}\\over Δx}$ 이며

Unity AR classification 실행
지금까지 Unity를 이용하여 원하는 카메라 화면의 일부를 추출하였고, 추출과 LiDAR를 동시에 실행하는 것 까지 진행했다. 이번에는 추출된 이미지를 Classification model을 사용하여 분류하는 작업에 대한 내용이다. 먼저 Unity에서 classifi
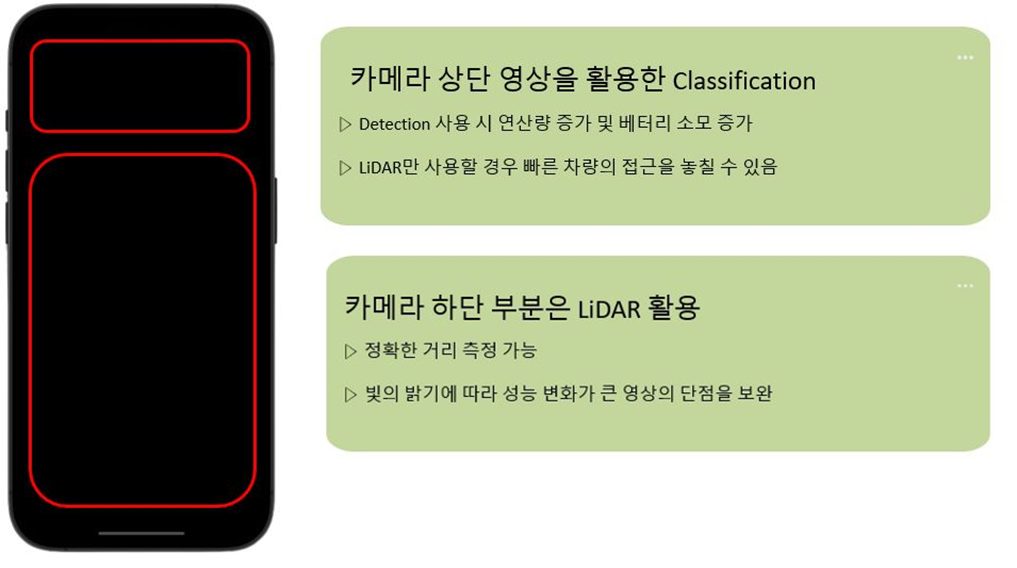
Unity AR camera with iOS LiDAR
본 게시글의 LiDAR 사용 부분은 Youtube순순스튜디오님의 해당 영상에서 배운 내용을 활용하였습니다. 앞서 진행했던 카메라 화면의 일부분 추출하기, 이후 추출한 이미지와 LiDAR를 동시에 사용할 필요가 있었다. LiDAR는 >- iPhone pro mod
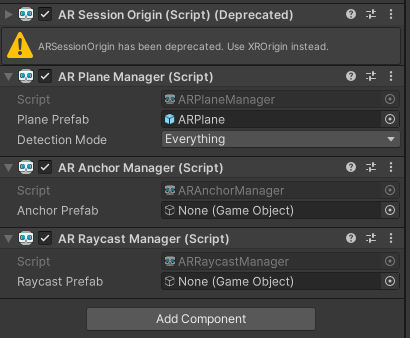
Unity AR Raycast 사용하기
iOS에서 제공하는 LiDAR를 활용하여 거리를 측정하기 위해 사용법을 찾던 도중 Unity의 AR Foundation 기능을 이용하면 사용이 가능하다는 것을 알게 되었다. AR Foundation을 사용했던 적이 전무했기에 인터넷과 유튜브를 헤매던 도중 가뭄의 단비
Unity AR camera 화면 정보 일부분을 추출하기
Unity에서 ARkit을 활용하여 프로젝트를 진행하기 위해 AR camera를 이용한 휴대폰 화면의 상단 1/3 지점을 추출할 필요가 있었다. 유니티의 기본 카메라가 아니라 AR camera의 정보를 가져오는 것이므로 어떤식으로 가져와야하나 인터넷을 돌아다니던 중 을