
- 전체보기(158)
- Parallelism(1)
- Power and Energy(1)
- test(1)
- Dependability(1)
- uart(1)
- I2C(1)
- casez(1)
- computer architecture(1)
- systemverilog(1)
- Reducing power(1)
- driver(1)
- agent(1)
- Performance(1)
- VIF(1)
- build_phase()(1)
- convert2string()(1)
- {32{sub}}(1)
- Cost of IC(1)
- flynn's Taxonomy(1)
- casex(1)
- uvm_do(1)
- type_id::create(1)
- 삼항연산자(1)
- uvm_info(1)
- Static power(1)
- monitor(1)
- Constructor(1)
- spi(1)
- Model Compression(1)

CH2: Digital Logic and Hardware Fundamental (14~23)
14. What is the difference between Combinational and Sequential logic?
CH 1: Introduction to Modern Verification
The verification gap is the disparity between design complexity and verification productivity.verifiation consumes up to 70% of the cycle because it i
week 5,6
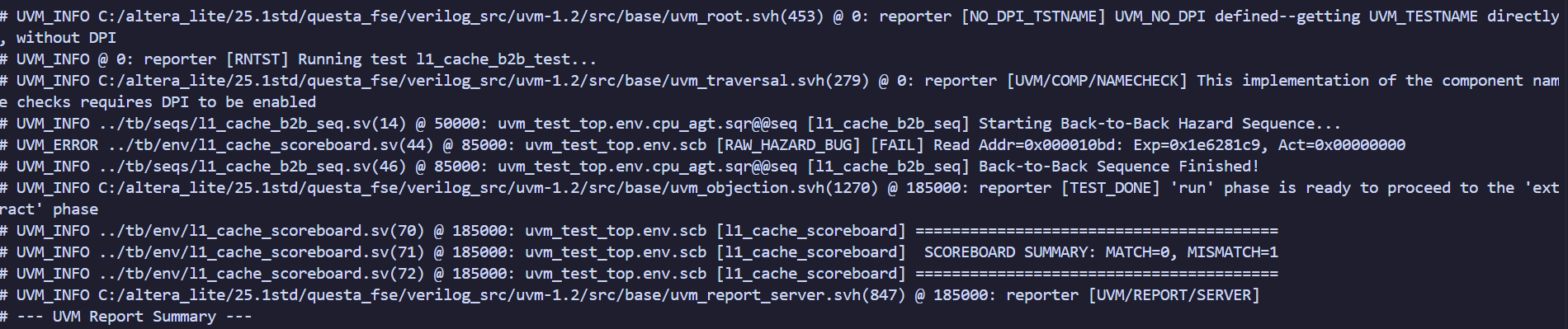
중요한 핵심은 바로 이 한 줄입니다:UVM_ERROR ... RAW_HAZARD_BUG Read Addr=0x000010bd: Exp=0x1e6281c9, Act=0x00000000이 로그가 말해주는 스토리는 다음과 같습니다.CPU의 명령: "야 캐시, 0x000010
5 Essential Question
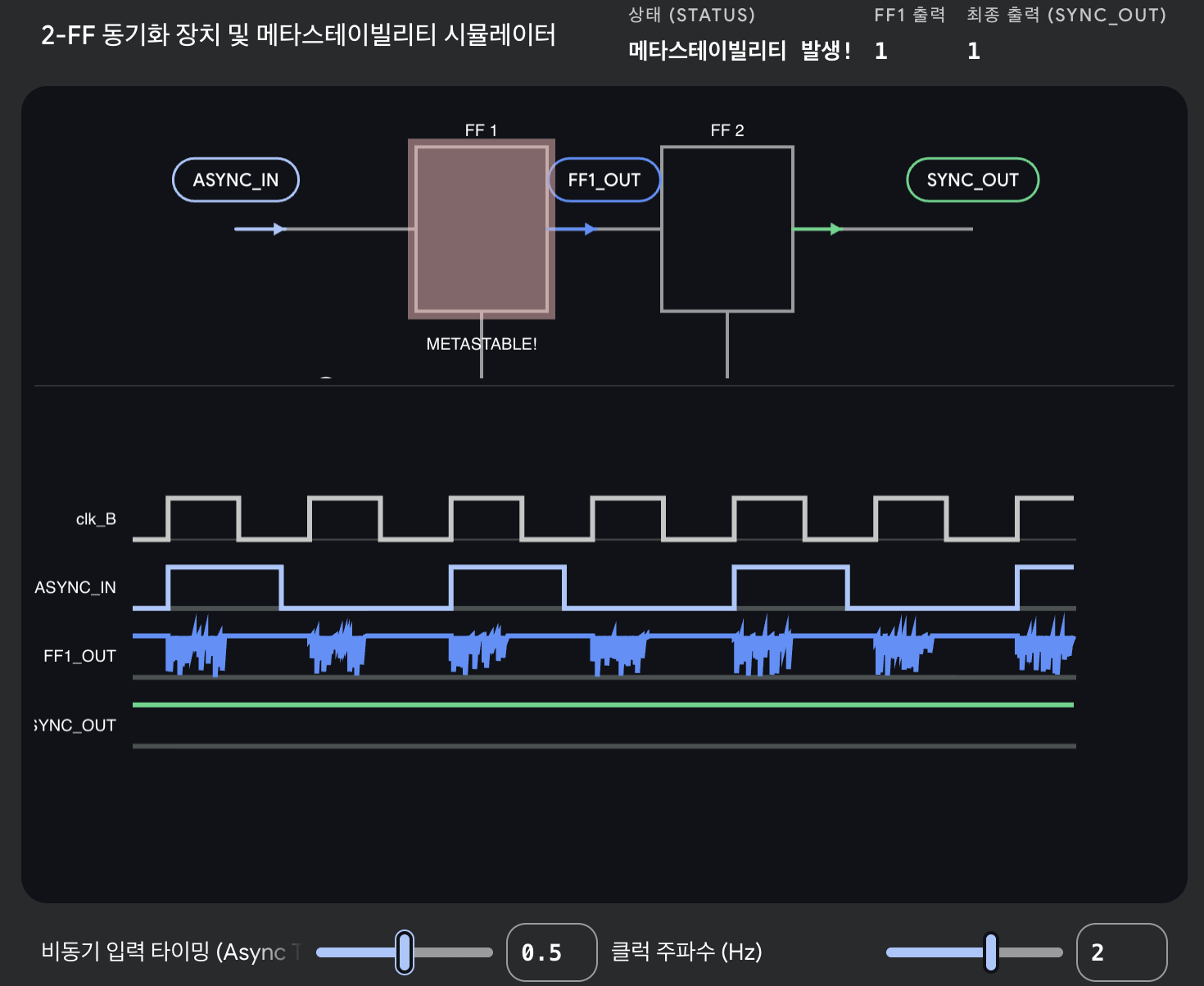
MetastabilityMetastability in VLSI is a phenomenon where a flip-flop enters an unstable intermediate voltage state (neither stable '0' nor '1') due to
Cache
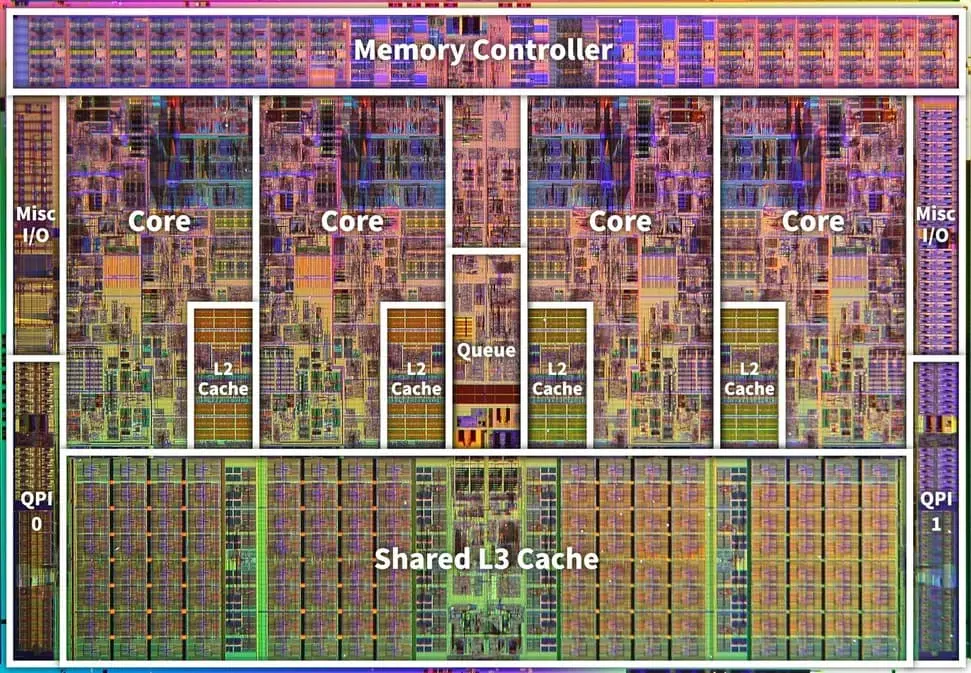
L1 Cache: 프로세서와 가장 가까운 캐시. 속도를 위해 I$ 와 D$로 나뉜다.Instruction Cache (I$): 메모리의 TEXT 영역 데이터를 다루는 캐시.Data Cache (D$): TEXT 영역을 제외한 모든 데이터를 다루는 캐시.L2 Cache:
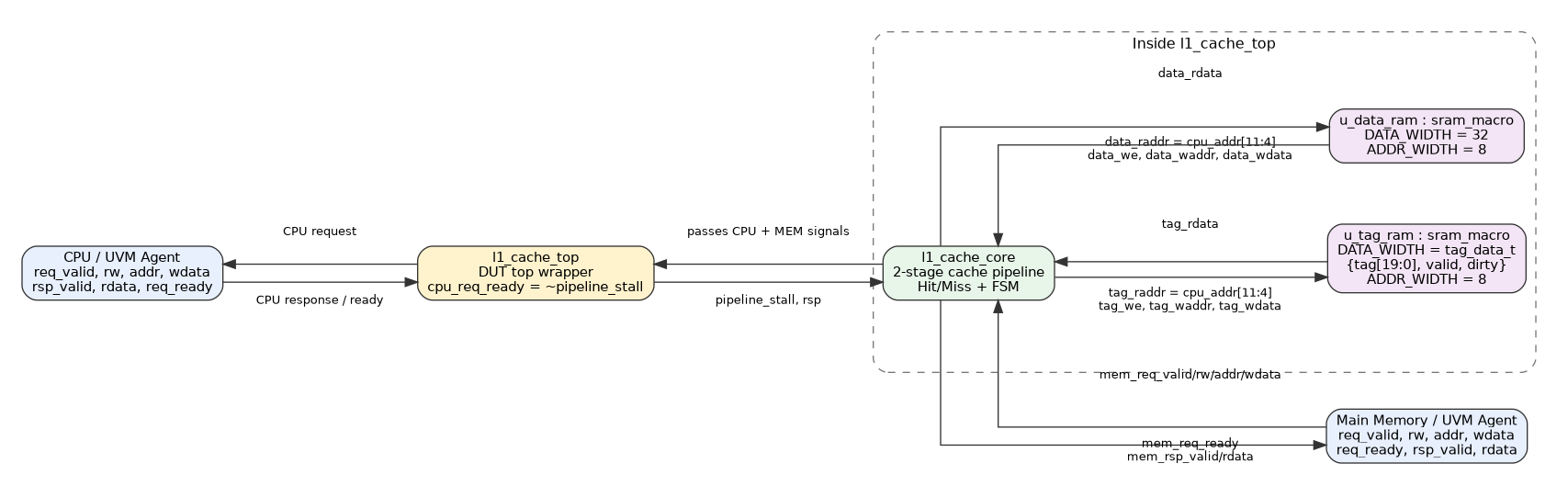
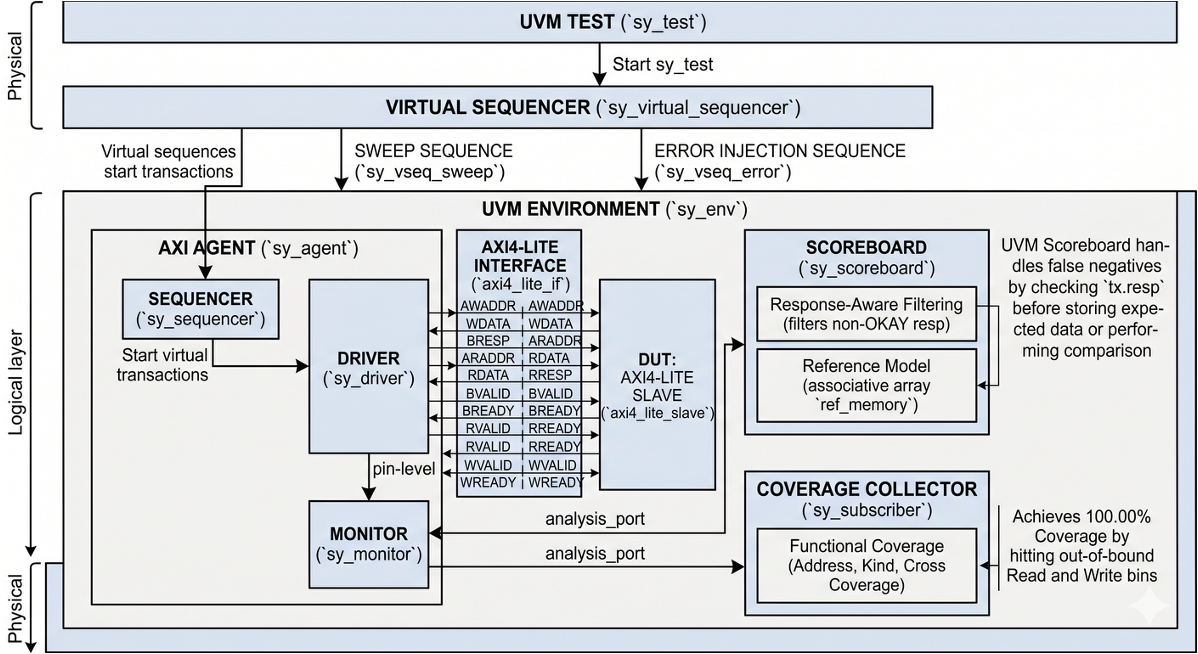
DUT: Cache controller
2-Stage 파이프라인, Direct-Mapped, Write-Back, Write-Allocate" 방식을 사용하는 캐시 컨트롤러L1 Cache (Level 1 Cache, 1차 캐시)는 간단히 말해 CPU와 메인 메모리(RAM) 사이에 존재하는 '가장 빠르고, 가
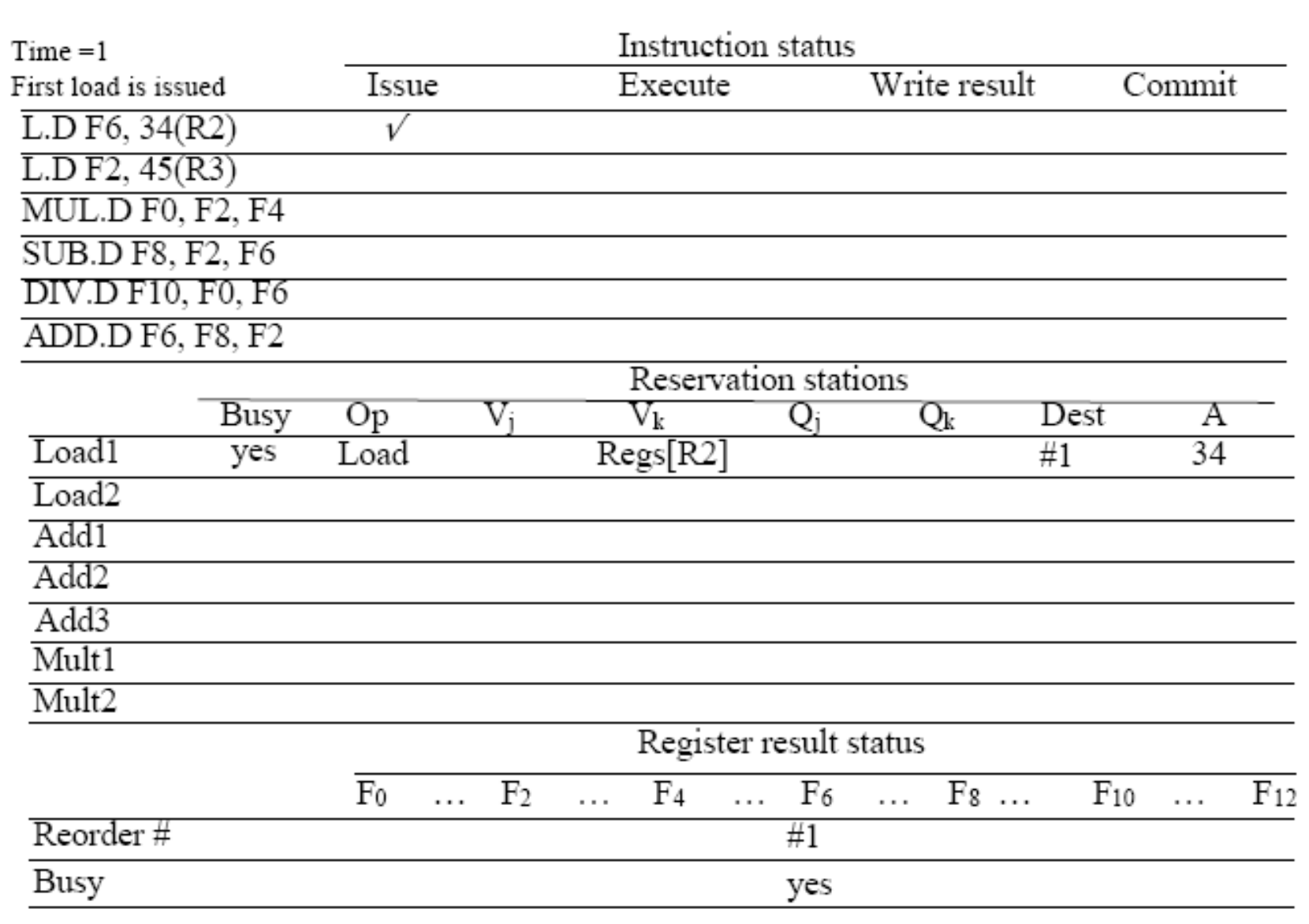
Hardware-based speculation
한 사이클에 명령어를 4개, 8개씩 빨아들이는(Fetch) 슈퍼스칼라 구조에서는 단순히 분기 방향 하나 맞췄다고 파이프라인이 매끄럽게 돌아가지 않습니다. 명령어들 사이에 얽혀있는 데이터 의존성(Data Hazard) 때문에 ALU가 놀고 있는 시간이 생기기 때문입니다.
Cyber HW 5
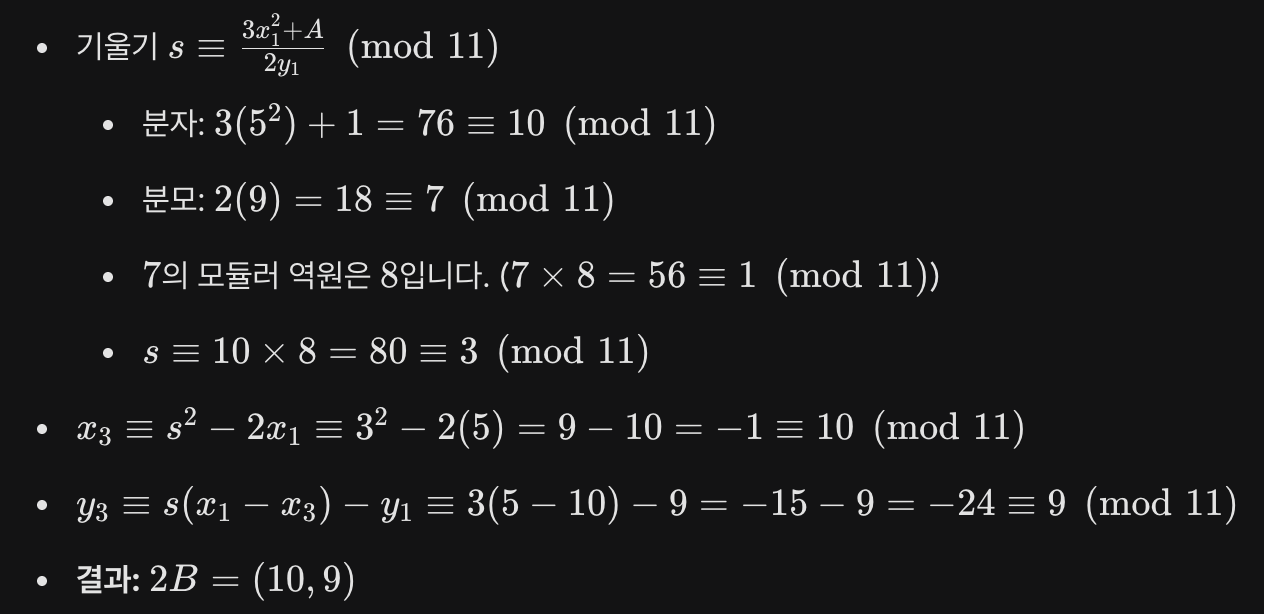
개인 키 $a = 6$상대방의 공개 키 $B = (5, 9)$타원 곡선 $E: y^2 \\equiv x^3 + x + 6 \\pmod{11}$ (즉, $A = 1, B\_{curve} = 6, p = 11$) $B \\rightarrow 2B \\rightarrow 3
Trouble shooting
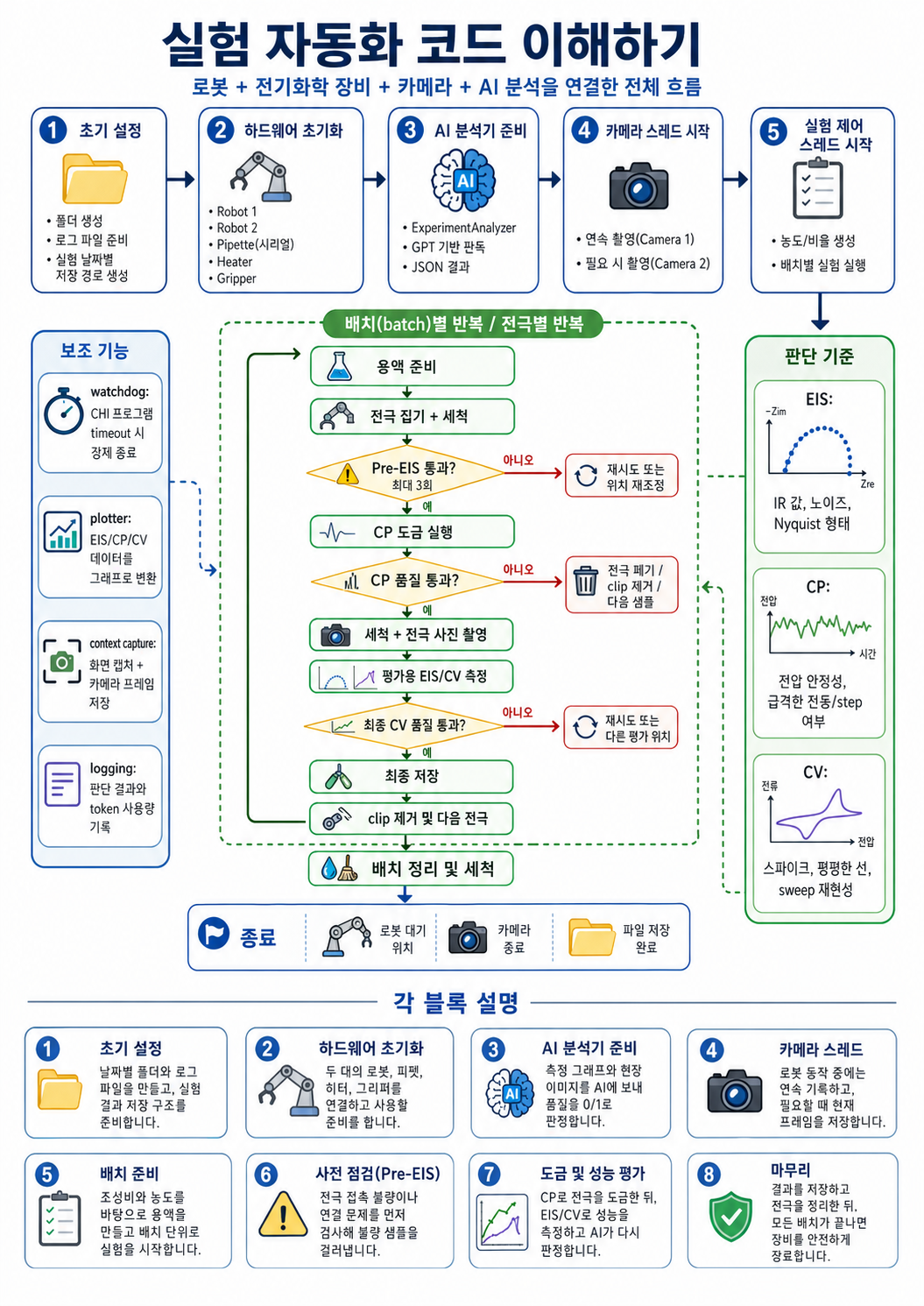
이 세 가지만 통제할 수 있으면 로봇 팔의 모든 물리적 움직임을 지배할 수 있습니다.마스터 명령어 (move_to_tube 함수):로봇 팔의 이동, 주사기(펌프) 제어, 집게(Gripper) 개폐, 측정 장비(CHI) 호출을 모두 관장하는 만능 함수입니다. 로봇을 움직
chi(case) 함수의 8가지 동작 모드 해부
: CP (Chronopotentiometry, 정전류 인가)물리적 동작: 정전류원(Current Source) 모드입니다. -0.004A(-4mA)의 직류 전류를 1200초(20분) 동안 강제로 밀어 넣습니다.목적: 쌩 철망에 Ni, Mo, P 이온을 억지로 달라붙게
기본 코드지식
Communication Specs: What are the physical interfaces (UART, TCP/IP) and specific port settings (baud rate, COM port) connecting the main PC to the ro
배경지식
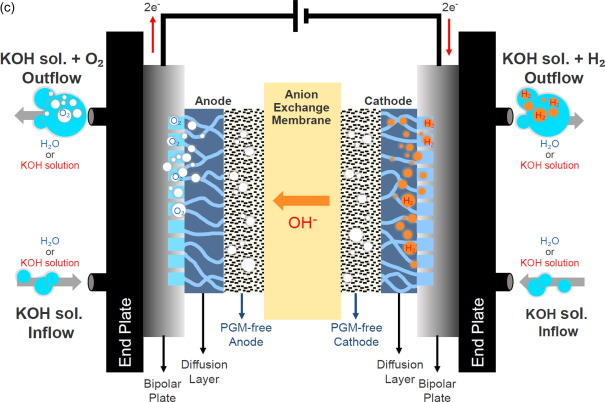
수소 = 궁극의 '무한 용량 하드디스크'여기서 수소(H2)가 등장합니다. 수소를 자체적인 연료라기보다는 '남는 전기를 보관하는 화학적 에너지 저장 매체(Energy Carrier)'로 이해하셔야 합니다.Write (저장): 낮에 남아도는 잉여 전력으로 물(H2O)을 전
NiMoP electrodeposition for water splitting
수소 = 궁극의 '무한 용량 하드디스크'여기서 수소(H2)가 등장합니다. 수소를 자체적인 연료라기보다는 '남는 전기를 보관하는 화학적 에너지 저장 매체(Energy Carrier)'로 이해하셔야 합니다.Write (저장): 낮에 남아도는 잉여 전력으로 물(H2O)을 전
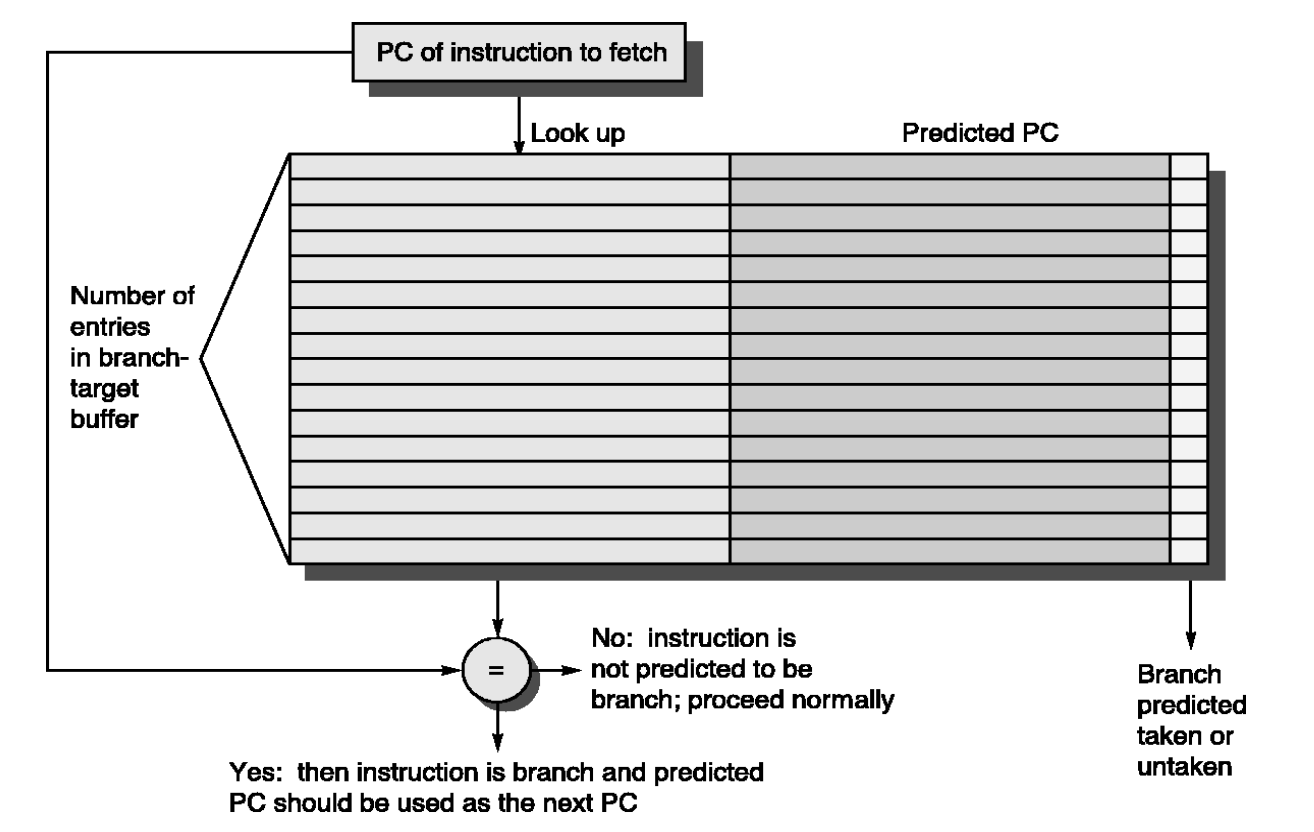
Tournament Predictors, Branch-Target Buffers (BTB)
\*Tournament Predictor (토너먼트 예측기)는 말 그대로 칩 내부에서 두 개의 서로 다른 예측기를 경쟁시켜서, "지금 이 분기문에서는 누구 말을 듣는 게 더 정확할까?"를 하드웨어가 스스로 판단하고 선택하는 메타 예측기(Meta-Predictor)\*\

Correlated Prediction/ final --
핵심은 "서로 관련이 없어 보이는 앞선 두 개의 if문이, 세 번째 if문의 결과를 100% 결정지어 버린다"는 것을 증명하는 것입니다. 이것이 바로 주변 문맥을 파악하는 상관 예측(Correlated Prediction)의 존재 이유입니다.먼저 C 코드를 논리적으로
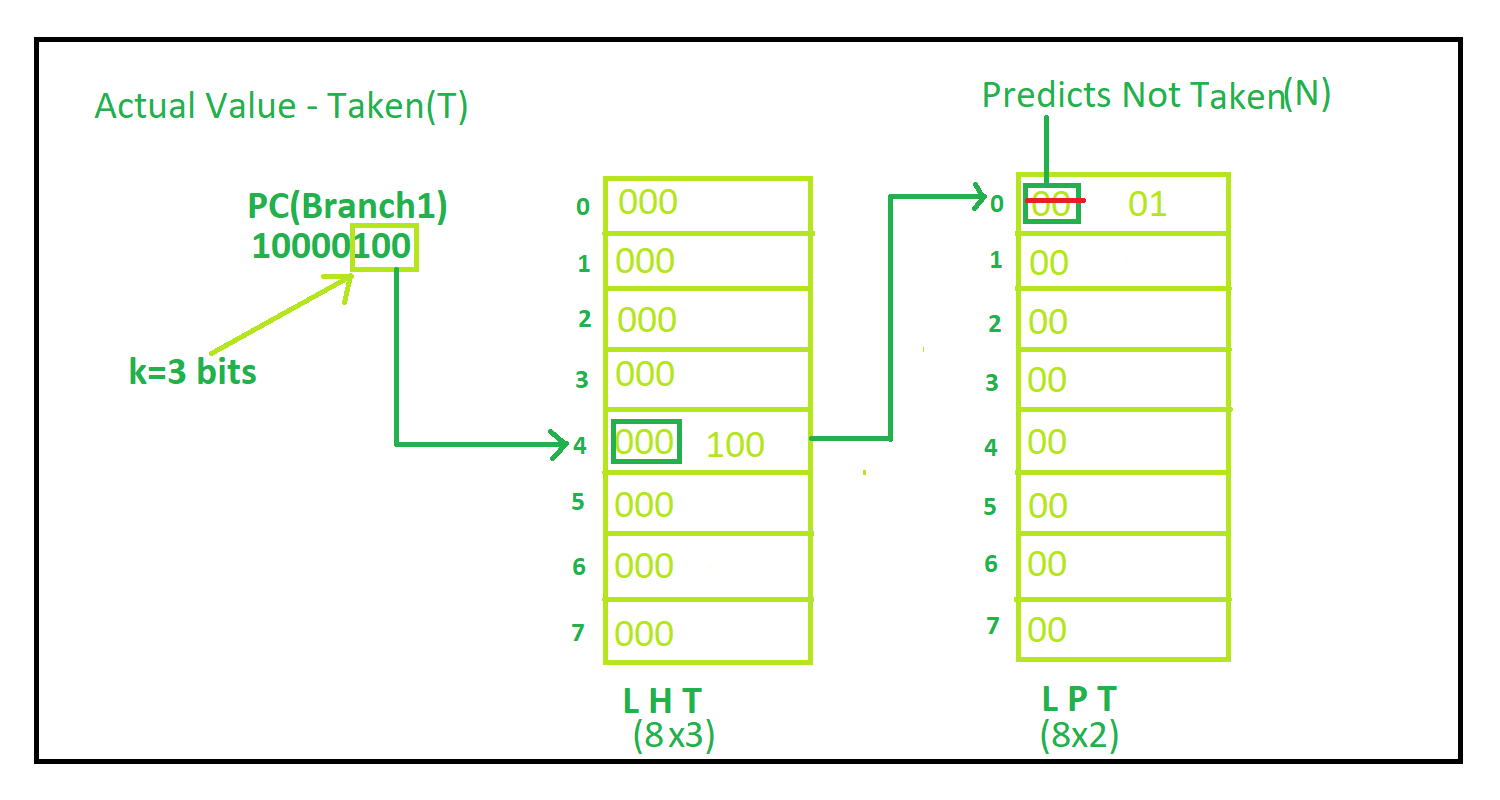
Dynamic Branch Prediction
Local Branch prediction:use own historyGlobal Branch prediction:determined by other instructionuse someone else history(동적 분기 예측의 필요성)파이프라인이 왜 과거의 기록을
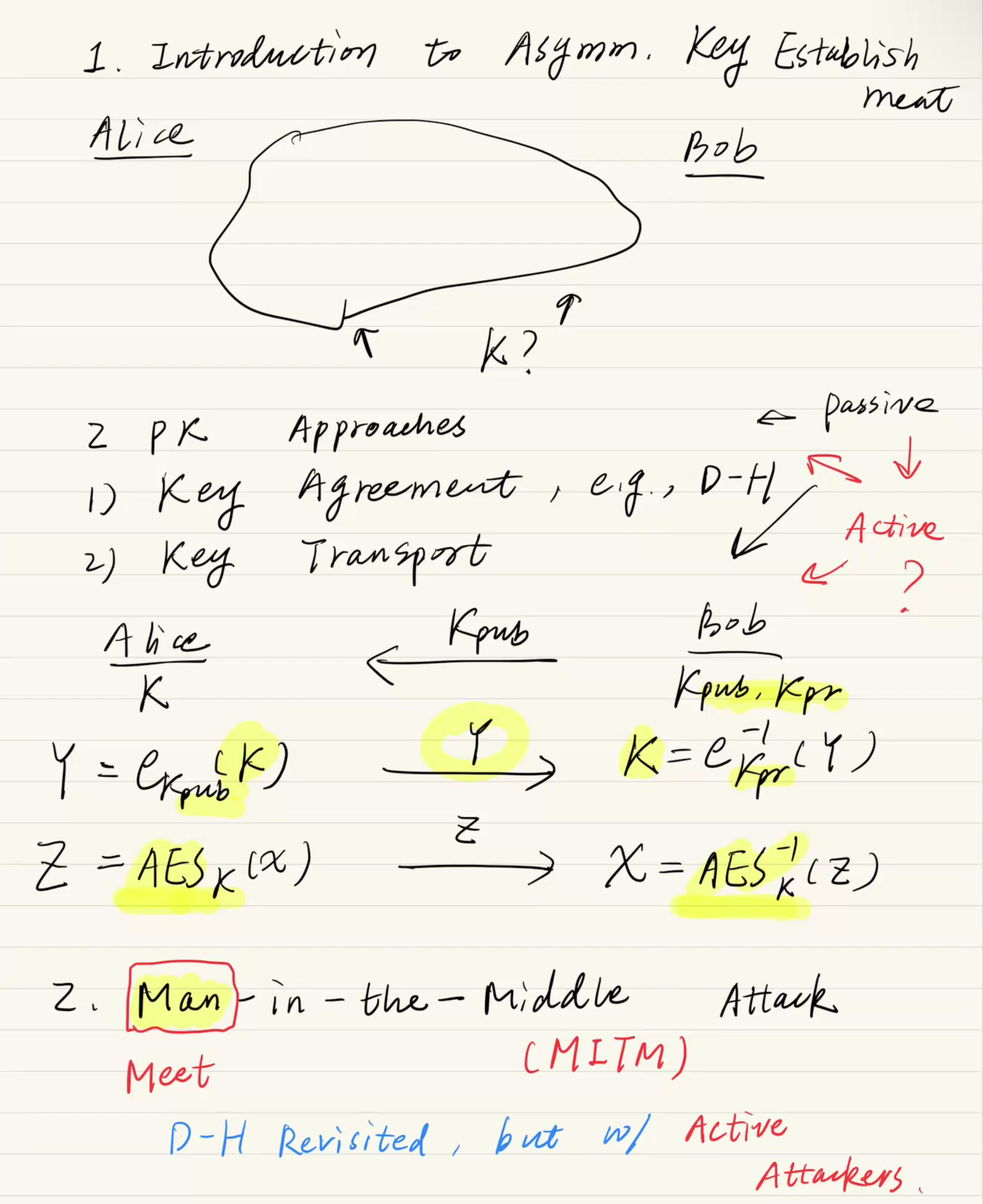
Man-in-the-Middle Attack(MITM), CA

KDC (Key Distribution Center)
![](https://velog.velcdn.com/images/houston_guy2/post/0d89a40c-c2d7-45b3-bcb7-7940c41479