- 전체보기(105)
- Introduction to Machine Learning(14)
- Computer Vision(13)
- Artificial Intelligence(13)
- Automobile SW Design(12)
- Practices in Visual Computing(12)
- Automotive Software Engineering(10)
- python(8)
- Bigdata Analysis(5)
- opencv(5)
- deep learning basics(4)
- Vehicle Dynamics and Control(4)
- data(4)
- 강연&전시회(3)
- Software testing(3)
- Crawling(2)
- 논문리뷰(2)
- YOLO(1)
Structural Testing
Structural testing을 이해하기 위해서는 먼저 "프로그램이 왜 실패하는가?", "어떤 조건에서 실패가 발생하는가?를 짚어야 한다.
Blackbox Testing
Blackbox Testing은 소프트웨어의 내부 구현을 보지 않고 요구사항만을 기반으로 테스트 케이스를 설계하는 기법으로, 기능 단위 분해, 입력·출력 분할, 경계값 및 무작위 테스트 등을 활용해 결함을 체계적으로 발견한다.
Introduction to Testing and Verification
소프트웨어의 품질은 단순히 기능이 올바르게 동작하는지에 의해 결정되지 않으며, 사용성이 충분한지, 보안적·구조적으로 견고한지, 성능과 안정성이 요구 수준을 충족하는지 함께 평가해야 한다. 따라서 테스트는 실제 사용자 환경에서 효율성을 종합적으로 검증하기 위한 과정이다.
Lateral Dynamics
Lateral Dynamics란 차량이 곡선을 주행할 때 발생하는 횡방향 운동을 설명하는 이론으로, 타이어 힘과 모멘트를 고려한 Dynamic Model을 통해 조향각, 슬립각, 요우레이트 등의 성능 지표를 분석하고 조향 특성을 튜닝할 수 있게 돕는다.
Longitudinal Controls
차량의 종방향 움직임을 제어하여 안정성과 승차감을 향상시키기 위한 시스템 (CC, ACC, ABS, TCS)
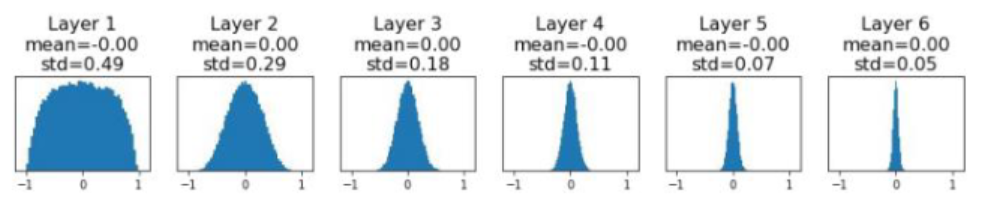
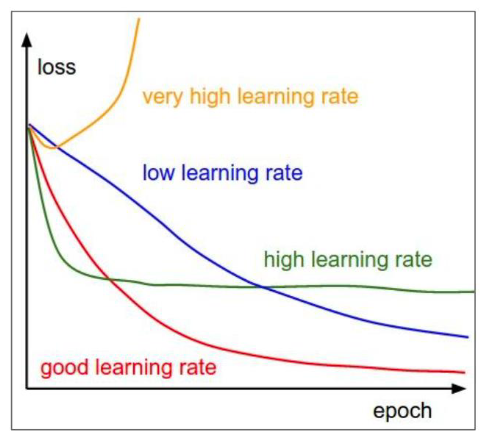
Optimization
Loss function 최적화를 위한 gradient descent 방법, learning rate scheduling 기법
Linear Classification
이미지 분류를 위한 가장 기초적인 기법인 Nearest Neighbor Classifier과 Linear Classifier를 중심으로, 모델의 학습 원리와 손실 함수, 일반화 기법까지
연속형 확률분포
다양한 연속확률분포(균일, 지수, 감마, 와이블, 베타)의 정의, 확률밀도함수(PDF), 누적분포함수(CDF), 기대값, 분산, 적률생성함수, 분위수 등 핵심 성질과 서로 간의 관계
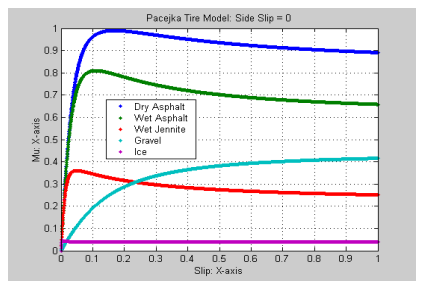
Longitudinal Dynamics
차량의 종방향 동역학은 엔진에서 바퀴까지 이어지는 파워트레인과 드라이브트레인을 통해 생성된 토크가 타이어를 회전시켜 종방향 힘을 만들고, 이때 차량의 가속·감속에 따라 무게 중심이 이동하며, 타이어의 슬립 비율·하중·마찰 계수 및 구름 저항 등과 상호작용한다.

Self-Attention
본 포스팅에서는 Transformer가 아닌 Transformer에서의 Self-Attention을 집중적으로 다룬다. 이해를 위해 Encoder 내에서 진행되는 Self-Attention을 기반으로 Attention score를 계산해 보기로 한다.
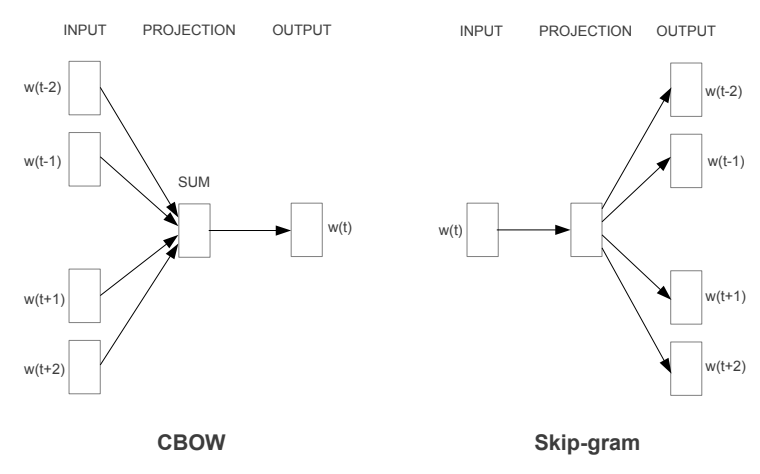
Efficient Estimation of Word Representations in Vector Space
단어를 연속적인 벡터로 표현하기 위한 모델 아키텍처
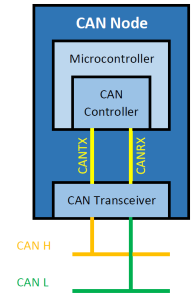
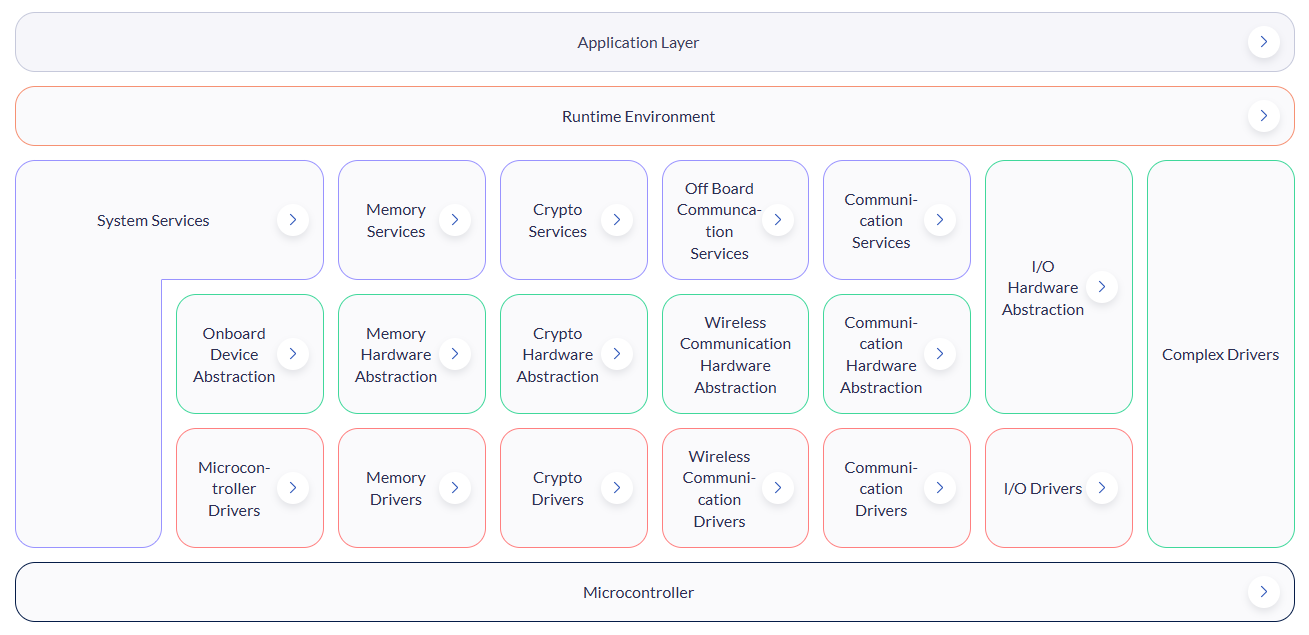
In-Vehicle Network
자동차의 전자화가 계속되면서 차량 내부의 다양한 센서, 액추에이터, ECU 등을 연결하는 네트워크 기술의 중요성이 커지고 있다. In-Vehicle Network는 차량 내부 통신의 핵심 기술로, 각종 장치가 원활히 통신하도록 한다.