Boosting Cross-spectral Unsupervised Domain Adaptation for Thermal Semantic Segmentation (Seokjun Kwon , Jeongmin Shin , Namil Kim , Soonmin Hwang , Yukyung Choi)(황순민 교수)
Abstract— In autonomous driving, thermal image semanticsegmentation has emerged as a critical research area, owingto its ability to provide robust sce
PCSCNet: Fast 3D semantic segmentation of LiDAR point cloud for autonomous car using point convolution and sparse convolution network. Expert Systems with Applications, 2023 (AI LAB)
PCSCNet: Fast 3D semantic segmentation of LiDAR point cloud for autonomous car using point convolution and sparse convolution network. Expert Systems
Collision Probability Field Based Interaction-Aware Longitudinal Motion Prediction (AI LAB 조기춘 교수)
Collision Probability Field Based Interaction-AwareLongitudinal Motion Prediction
AutoKU: An Autonomous Driving System Design for the World's First Mass-Produced Vehicle in Multi-Vehicle Racing Environment. IEEE Intelligent Vehicles Symposium, 2024 (AI LAB 조기춘 교수)
AutoKU: An Autonomous Driving System Design for the World's First Mass-Produced Vehicle in Multi-Vehicle Racing Environment. IEEE Intelligent Vehicles
MOSAIC: Generating Consistent, Privacy-Preserving Scenes from Multiple Depth Views in Multi-Room Environments 황순민 교수
MOSAIC: Generating Consistent, Privacy-Preserving Scenes from Multiple Depth Views in Multi-Room Environments
Personalized Driving Data-based Bump Prediction Using a Cloud-based Continuous Learning for Preview Electronically Controlled Suspension 조기춘 교수
Personalized Driving Data-based Bump Prediction Using a Cloud-based Continuous Learning for Preview Electronically Controlled Suspension
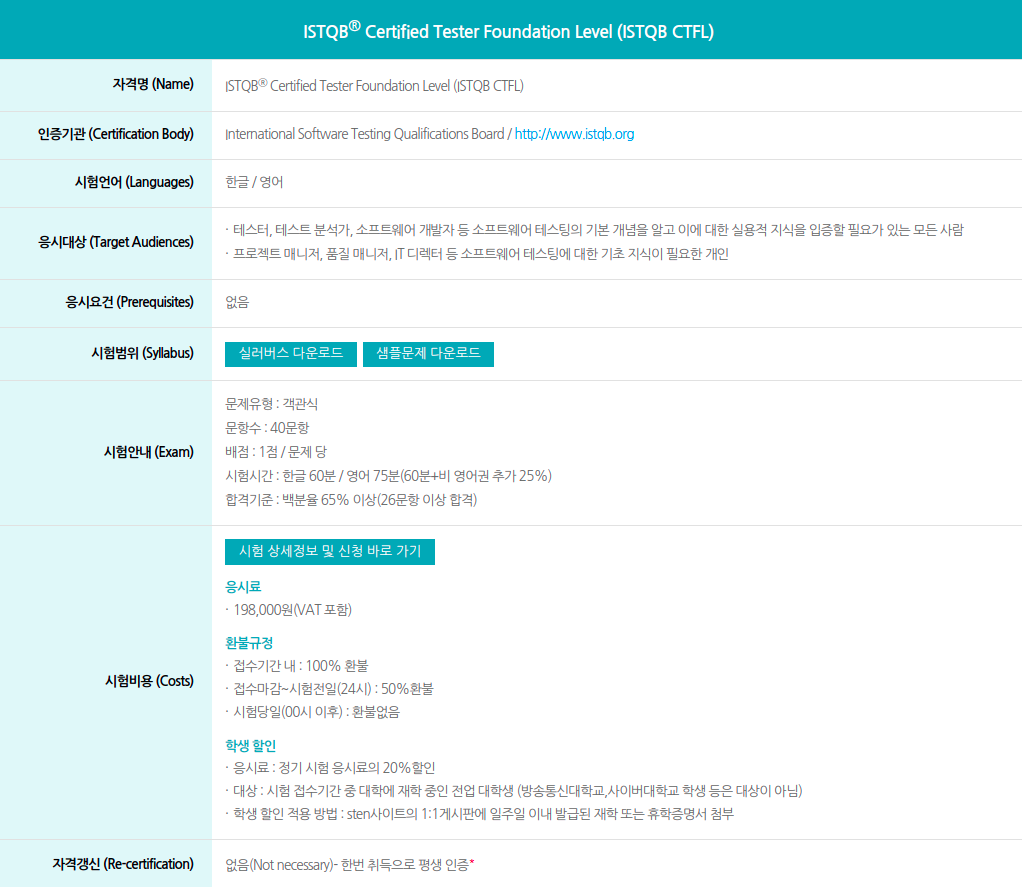
ISTQB SW 테스팅 자격시험
KSTQB 홈페이지(https://www.kstqb.org/sw/sw3.asp정식 자격명은 ISTQB Certified Tester Foundation Level이다. 시험은 한글/영어 두가지 방식으로 진행할 수 있다. 실라버스와 문제가 홈페이지에 나와있다.
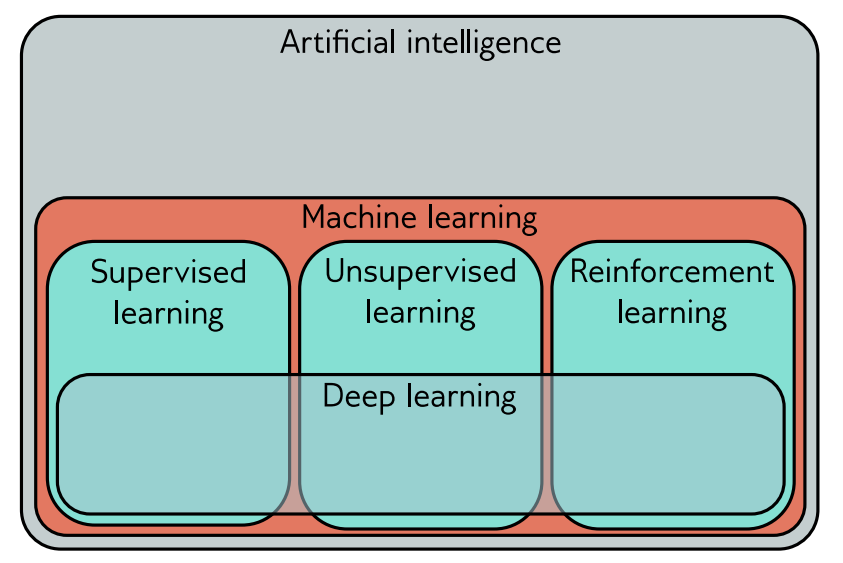
UDL 1. Introduction (Kor)
인공지능(AI)은 지능적인 행동을 모방하는 시스템을 구축하는 데 중점을 둡니다. 이는 논리, 탐색, 확률적 추론 등을 기반으로 하는 다양한 접근 방식을 포함합니다. 머신러닝은 AI의 하위 분야로, 관찰된 데이터를 기반으로 수학적 모델을 학습하여 결정을 내리는 방법을 연

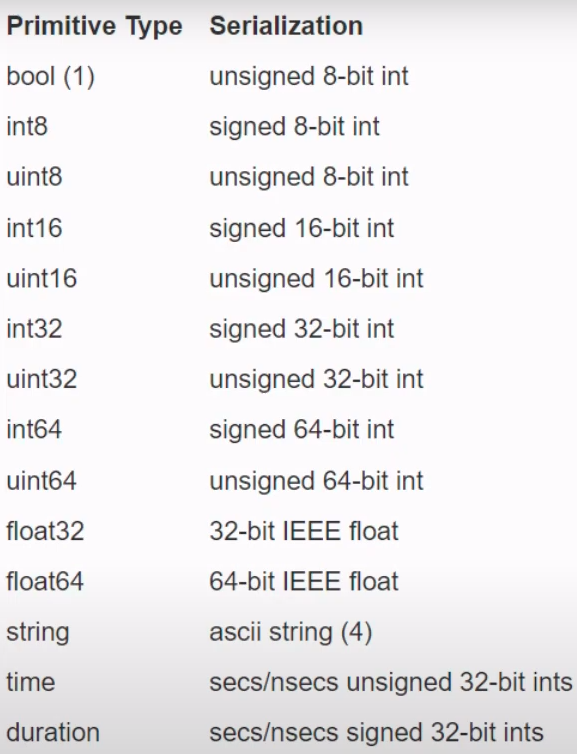
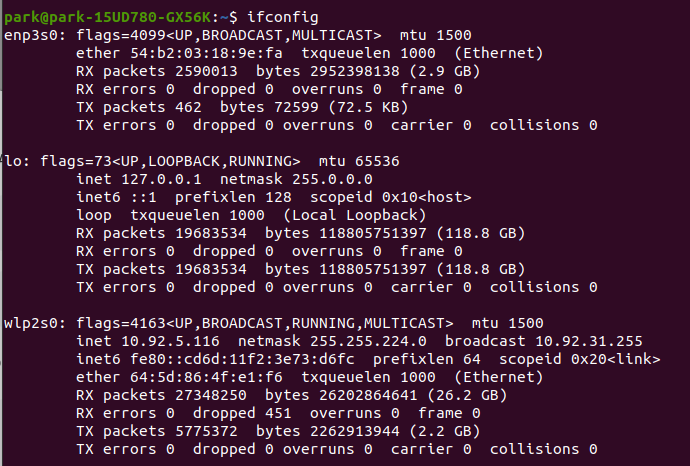
Chapter4, 5, 7. ROS 기초(Topic, Publisher, Subscriber, 커스텀 메시지 생성, launch, Network)
O
[ROS 기초 강의] Chapter3. ROS 환경 구조
\[ROS 기초 강의] Chapter3. ROS 환경 구조ros 기초 ros 환경 구조 ros 워크스페이스 구조 워크스페이스 저번 영상에서 캡틴 워크스페이스라는 이름으로 만든 폴더입니다 워크스페이스 아래 src 폴더가 있고 그 아래 여러 개의 패키지가 존재합니다 각 패
ROS 기초 강의 Chapter2-2. ROS란 무엇인가?
code:mkdir catkin_ws cd catkin_ws/ mkdir src cd src catkin_create_pkg basic_tutorial roscpp'''ros 패키지를 생성 (catkin_create_pkg 패키지이름)ROS 사용을 위한 의존성 패키지는
ROS 기초 강의 Chapter2-1. ROS란 무엇인가?
ROS 기초 강의 Chapter2-1. ROS란 무엇인가?ㅡ ROS에서 실행하는 단위 프로세스 소스코드를 작성하고 실행하면 그것이 노드가 됩니다. ㅡ roscore가 실행중인 상태여야 함 ㅡ 노드는 rosrun 명령어를 통해 실행할 수 있음 ㅡ> rosrun (패키지
ROS 기초 강의 Chapter1. ROS란 무엇인가?
ROS 기초 강의 Chapter1. ROS란 무엇인가?ㅡ Robot Operating System 의 약자 ㅡ 로봇 소프트웨어를 구축하는데 도움이 되는 라이브러리 ㅡ 모듈화의 이점 ㅡ slam 및 nvigation 등 다양한 오픈소스 제공 ㅡ 개발 및 유지보수 시간 단
ROS 기초 강의 Chapter0. 강의소개
ROS 기초 강의 Chapter0. 강의소개강의 목차Chapter1. ROS란 무엇인가?Chapter2. ROS란 NodeChapter3. ROS란 환경구조Chapter4. ROS란 TopicChapter5. ROS란 LaunchChapter6. ROS란 Service
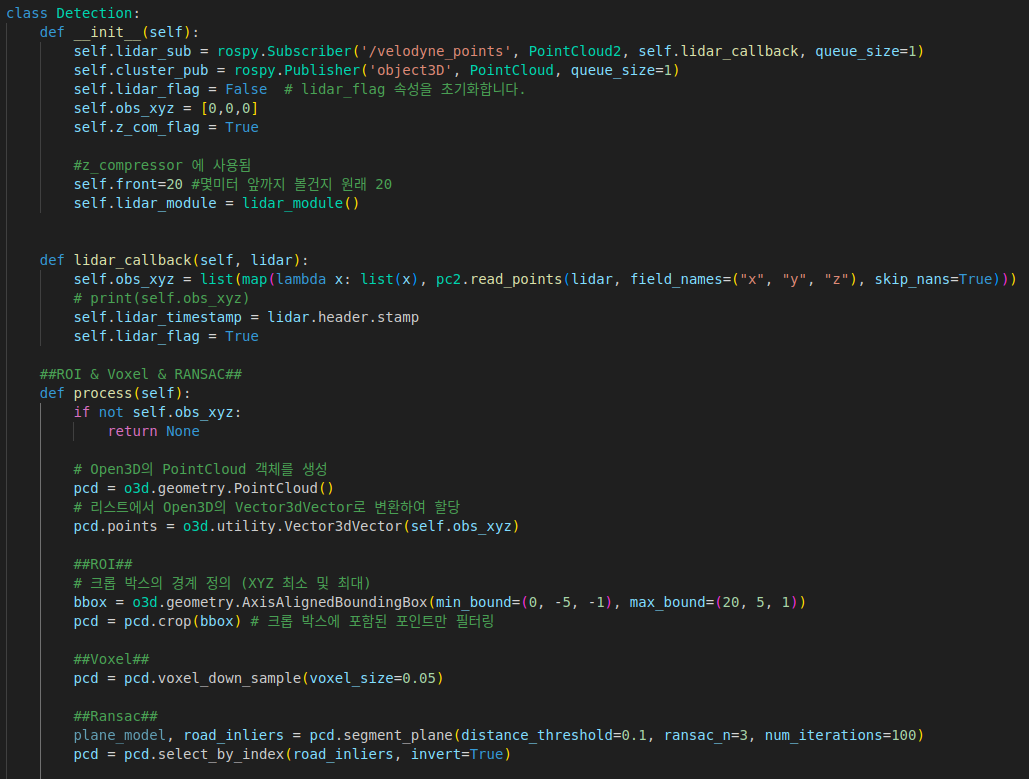
How to use LiDAR
안녕하세요. 오늘은 라이다를 사용하는 방법에 대해 알려드리겠습니다.velodyne lidar VLP16 기준으로 설명 \-라이다 초기 설정 방법\-라이다 백파일 래코드 방법\-라이다 백파일 실행 방법https://gosury32.tistory.com/3아직 작