Paper
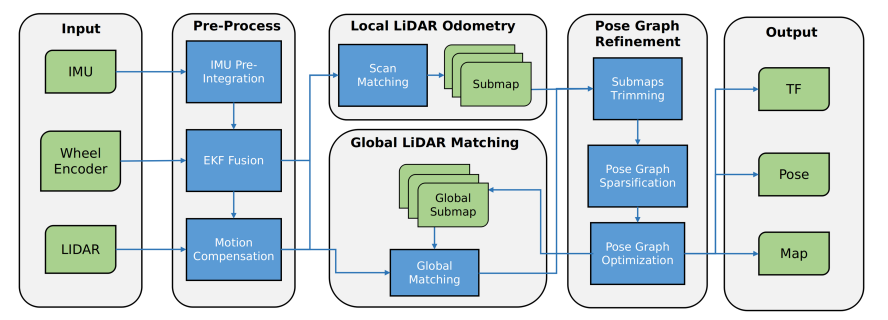
1.FAST-LIO2

현재 feature를 뽑는 방법에 대해 공부하고 있는데 최근(?) 알고리즘 중 raw data를 쓰는 FAST-LIO2는 왜 feature를 뽑지 않는지 뽑지 않고 어떻게 효율적으로 작업을 수행하는지 궁금하여 이 논문을 읽게 되었습니다. 이 논문은 2022 T-R
2.A LiDAR SLAM With PCA-Based Feature Extraction and Two-Stage Matching
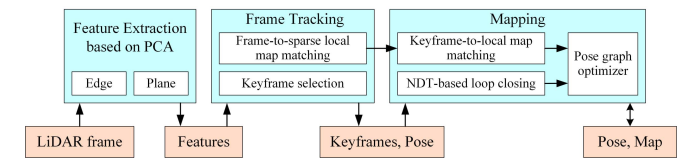
시험 기간이라 올리지 못했는데 시험이 어제 끝나 얼른 읽어서 올립니다!오늘의 논문은 feature를 뽑을 때 PCA를 활용하는 논문이고 정확도를 많이 올릴 수 있는 방법이라 읽어보았습니다.1.Introduction이 논문에서는 LiDAR SLAM이 현재까지는 Camer
3.NoPe-NeRF:Optimising Neural Radiance Field with No Pose Prior
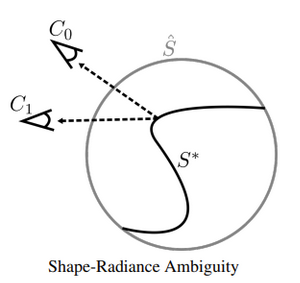
이 논문은 NeRF를 보완한 논문 중 하나입니다.NeRF는 입력 값으로 사진을 넣을 때 카메라 Pose도 필요합니다. 하지만 정확한 Pose를 아는 것은 쉽지 않고 모든 값을 넣어주기도 힘들기 때문에 이 논문은 딥러닝을 통해 Pose를 입력할 필요 없이 NeRF sce
4.∇SLAM(Grad SLAM):Dense SLAM meets Automatic Differentiation
이 논문은 2020 ICRA에 나온 Grad SLAM입니다. 예전부터 이어져 오던 딥러닝 열풍에 맞춰 SLAM에서도 딥러닝을 활용하기 위해 작성된 논문입니다. 딥러닝을 사용하기 위해서는 모든 과정이 미분 가능해야 합니다. 아직은 미분 가능하지 않은 부분이 많기 때문에
5.Point Cloud Pre-training with Diffusion Models

Point Cloud를 생성 모델을 활용하여 Pre-processing을 하는 논문입니다.지금까지 Point Cloud의 unordered, non-uniform density 특징 때문에 학습이 쉽지 않았습니다.이것을 point-to-point generation t
6.Self-Supervised Depth Correction of Lidar Measurements From Map Consistency Loss
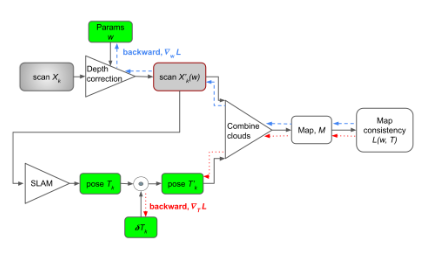
이 논문은 RA Letter에 2023년에 출간된 논문입니다. 간단하게 LiDAR의 noise나 bias들을 deep learning으로 학습하여 정확한 LiDAR depth를 통해 높은 성능의 SLAM을 진행하겠다는 것입니다.LiDAR는 비교적 정확한 센서로 알려져있
7.SemAttNet:Towards Attention-based Semantic Aware Guided Depth Completion

IntroductionDepth 정보를 추정하는 것이 매우 중요합니다.그런데 현재 센서들의 depth를 보면 camera는 dense한 반면 depth 추정이 덜 정확합니다.LiDAR는 depth의 정보가 훨씬 정확하지만 sparse하여 depth 정보가 부족합니다.그
8.Robust Smooth Feature Extraction from Point Clouds

1\. Introductionpoint cloud의 geometric processing은 더 중요해지고 있습니다.sharp feature의 보존은 많은 계산과 modeling 적용을 위해 가장 중요한 고려사항입니다.Feature는 discrete survace dat
9.VLFM: Vision-Language Frontier Maps for Zero-shot Semantic Navigation
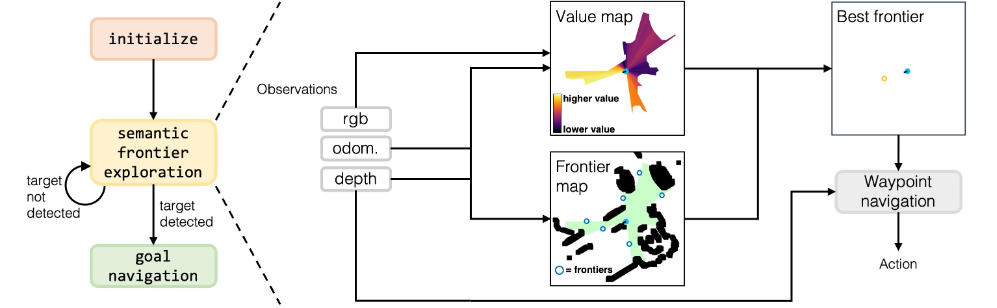
인간이 처음 가는 환경에서 길을 찾는 것은 매우 복잡한 일입니다.이 과정은 관측한 map과 가지고 있는 정보를 활용하여 길을 찾게 됩니다.가지고 있는 지식은 특정한 물체의 위치나 geometric한 정보를 포함하는 누적된 semantic 정보입니다. 예를 들어, 우리는
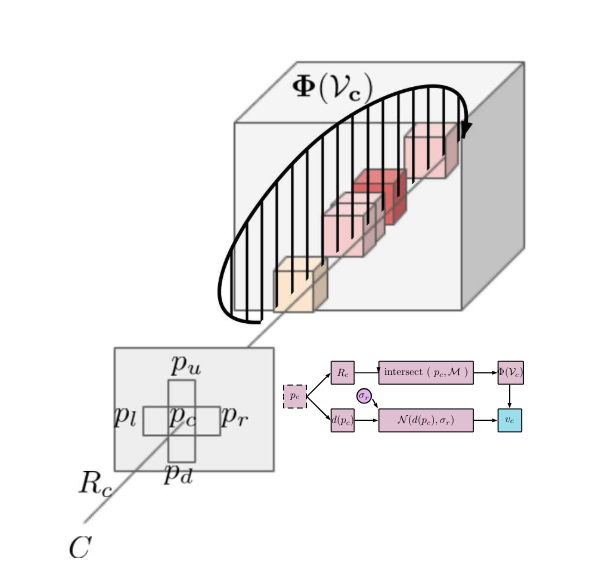
10.PIN-SLAM: LiDAR SLAM Using a Point-Based Implicit Neural Representation for Achieving Global Map Consistency
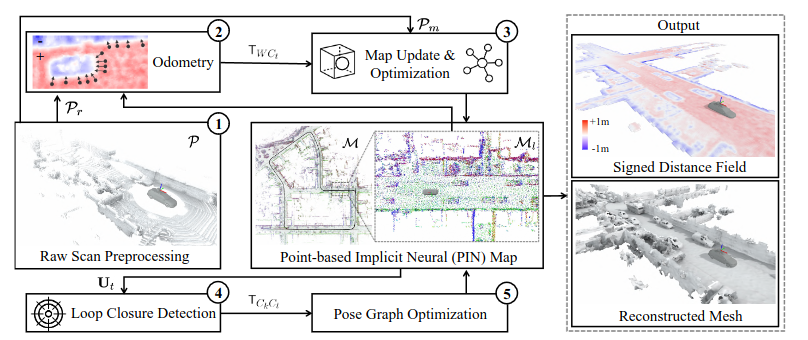
IntroductionPIN-SLAM은 LiDAR를 기반으로한 implicit neural reprentation SLAM 알고리즘을 제안하는 논문입니다.최근 implicit representation은 많은 장점을 보이고 있습니다.신경망을 훈련시켜 장면의 관측값을 학
11.X-SLAM: Scalable Dense SLAM for Task-aware Optimization using CSFD
이 논문은 앞 서 설명 드린 CSFD를 이용하여 빠르고 메모리적으로도 효율적인 backpropagation을 가능하게 한 논문입니다. 2020년 grad-slam이라는 미분 가능한 slam이 나왔는데 memory 문제로 인해 iteration을 60번 이상 할 수 없고
12.Grounding Image Matching in 3D with MASt3R
이 논문은 naverlabs에서 나온 논문으로 2이미지를 사용하여 이미지의 depth를 추정하고 association을 찾는 논문입니다. 이미지의 매칭은 2D에서 pixel을 매칭하는 것인데 이미지는 결국 3D 공간을 찍은 것인데 2d로 매칭을 할 경우정확한 assoc
13.Robust Localization for Intelligent Vehicles Based on Pole-Like Features Using the Point Cloud
이 논문은 제가 하고 있는 연구와 약간 관련이 있는 것 같아서 읽어보았습니다.이 논문은 자동차가 localization을 할 때 pole 모양의 feature를 활용하겠다는 논문입니다.도시 환경에서 pole 모양의 feature는 큰 단서가 되기 때문에 이것을 탐지한
14.AutoSDF: Shape Priors for 3D Completion, Reconstruction, and Generation

Introduction 3d reconstruction을 할 때 SDF학습을 진행합니다. sdf학습을 할 때 이 물체가 어떻게 생겼는지를 미리 안다면 훨씬 학습이 효율적으로 진행되지 않을까요? 이러한 생각에서 시작한 autoSDF를 소개하겠습니다. 우리가 책상을 절반만
15.MERF: Memory-Efficient Radiance Fields for Real-time View Synthesis in Unbounded Scenes
Introduction Implicit Neural representation인 NeRF의 단점을 고친 논문입니다. NeRF의 경우 시간이 너무 오래 걸리고 large Scene을 나타낼 수 없다는 단점이 있습니다. 이것을 해결하기 위해 MERF 논문은 baking 방
16.Plenoxels: Radiance Fields without Neural Networks
이 논문은 2022년에 CVPR에 나온 논문입니다.UC 버클리에서 썼네요.이 연구의 시작은 NeRF가 너무 느리다는 것에 있습니다.너무 느리기 때문에 사용할 수가 없어 이것을 빠르게 하기 위해 Plenoxel을 제안합니다.이 논문은 학습을 할 때 신경망 없이 시점에 따
17.Baking Neural Radiance Fields for Real-Time View Synthesis
이 논문은 Google Research에서 2021 ICCV에 제출한 Baking Neural Radiance Fields for Real-Time View Synthesis입니다.NeRF가 너무 느려서 real-time rendering을 하기 위해 학습한 Netwo
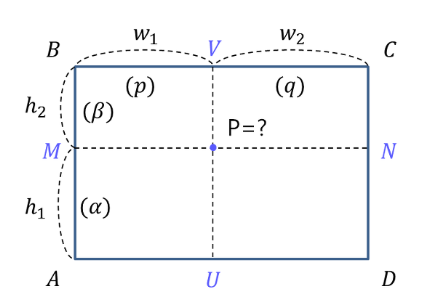
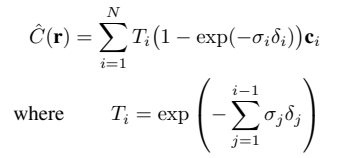
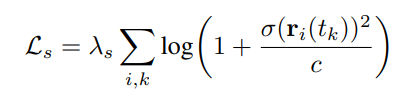
18.SNI-SLAM: Semantic Neural Implicit SLAM
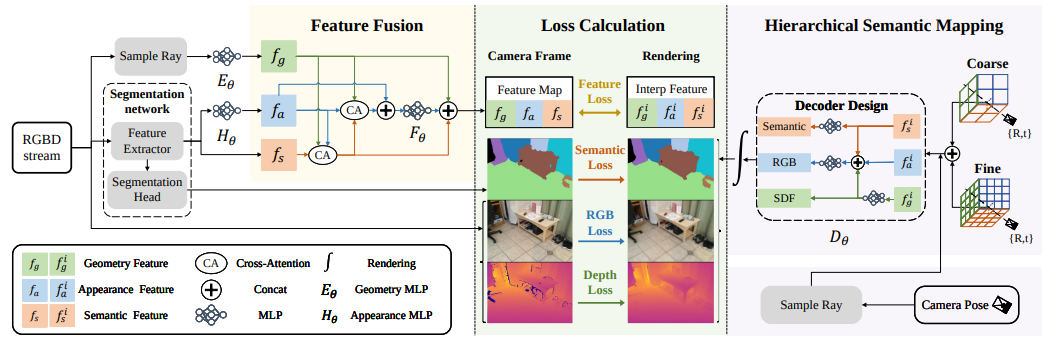
이 논문은 2024년 CVPR에서 나온 semantic slam논문이고요상하이 자오퉁 대학교의 Siting Zhu씨가 1저자네요.NeRF-based SLAM의 경우 두가지 어려운 점이 있다고 합니다.Appearance, Geometry, Semantic 정보들이 모두
19.DG-SLAM

오늘 정리할 논문 2024 Neurips에 poster로 선정된 DG-SLAM입니다.중국 Fudan University에서 Yueming Xu님이 쓰셨습니다.최근 많은 연구에서 SDF, voxel grid, mesh, surfel cloud와 같은 기존의 시각적 SLA
20.X-ICP: Localizabiltiy-Aware LiDAR Registration for Robust Localization in Extreme Environmnets
이 논문은 2024년 TRO에 나온 논문입니다.취리히 연방공대의 Turcan Tuna님께서 쓰신 X-ICP입니다.터널이나 동굴등 scan과 matching이 잘안되는 환경에서도 registration을 강건하게 할 수 있는 논문입니다.현재 ICP 알고리즘의 한계점:IC
21.A General Framework for Lifelong Localization and Mapping in Changing Environment
이 논문은 싱가폴 Min zhao라는 분이 회사에서 쓴 논문 같습니다.슈퍼 마켓이나 주차장 등 정적이지 못한 환경에서 로봇이 Localization을 해야할 경우가 많습니다.이렇게 변화하는 환경을 map에 업데이트 하면서 SLAM하는 것을 이 논문에선 Lifelong
22.Efficiently Closing Loops in LiDAR-Based SLAM Using Point Cloud Density Maps
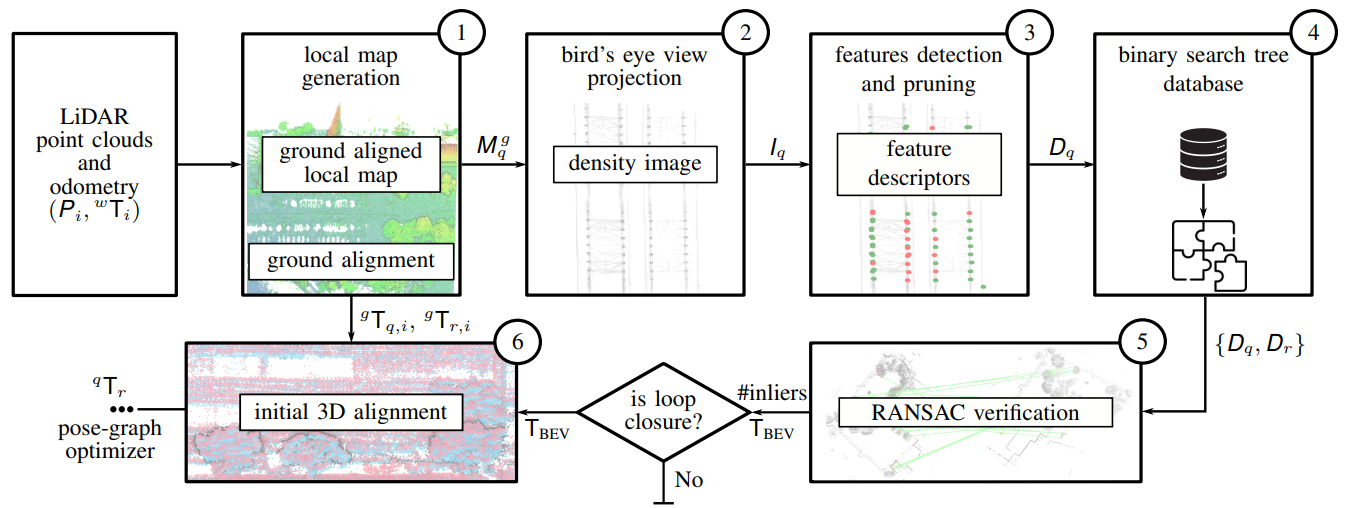
LiDAR SLAM을 하다보면 제일 골치 아픈게 place recognition인 것 같습니다.이것을 했다는 논문이 2025년에 나와서 한 번 읽어보았습니다.일리노이 대학교에서 쓴 논문입니다.이 논문은 LiDAR를 통한 Loop Closing Detection을 어떻게
23.A Survey on Active Simultaneous Localization and Mapping: State of the Art and New Frontiers
Active SLAM은 로봇이 단순히 수동적으로 주어진 경로를 따라가며 지도를 작성하는 Passive SLAM과 달리, 스스로 다음 행동을 결정하여 SLAM 성능을 극대화하는 것을 목표로 합니다.=> Active SLAM은 Exploration과 SLAM 성능 최적화라
24.DROID SLAM
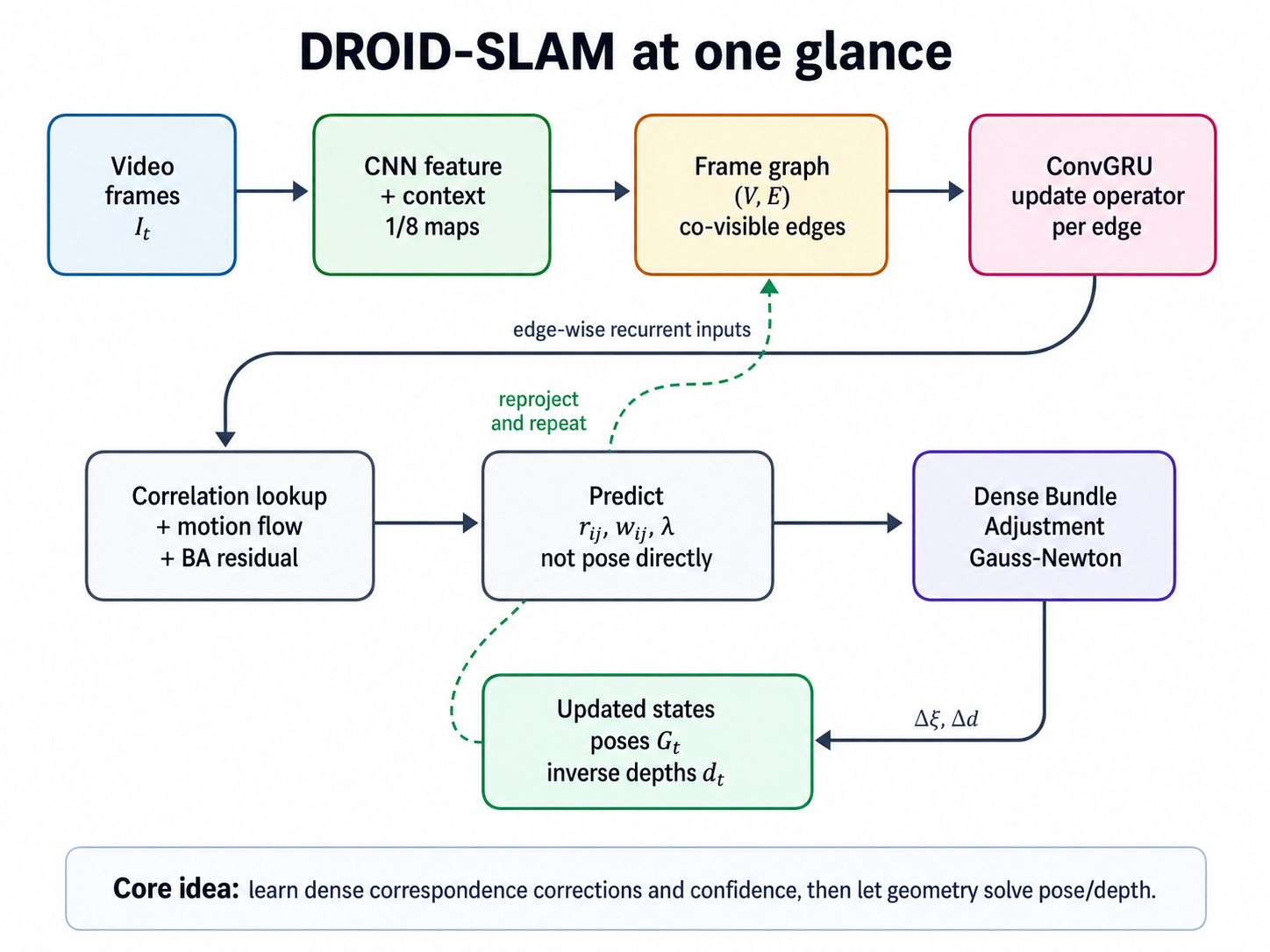
이 글은 DROID-SLAM: Deep Visual SLAM for Monocular, Stereo, and RGB-D Cameras를 정리한 글이다. deep-learning SLAM이 핫하기에..핵심은 단순하다. DROID-SLAM은 pose를 네트워크가 직접 찍어