태그 목록
- 전체보기(21)
- simulation(11)
- ROS(8)
- GAZEBO(8)
- cpp(7)
- CodingTest(7)
- beakjoon(5)
- project(2)
- visualstudiocode(1)
- python(1)
- 강화학습(Reinforcement learning)(1)
OpenAI GYM으로 강화학습 시작하기(1)
로보틱스에 대한 열정으로 차근차근 나아가보려고 한다!그 첫걸음으로 강화학습에 대해 알아가보고자 한다.그 이유는 최근 관심을 가지게 된 뛰어난 성능을 보이는 DreamWaQ가 Deep reinforcement learning을 통해 만들어졌기 때문이다.DreamWaQ 논
2024년 4월 22일
·
0개의 댓글·
0


[Simulation] 오픈소스 기반 시뮬레이션 패키지 활용
개요 목적지 경유 (waypoint) Line follower Blob tracking Object Detection Object Recognition
2023년 7월 3일
·
0개의 댓글·
0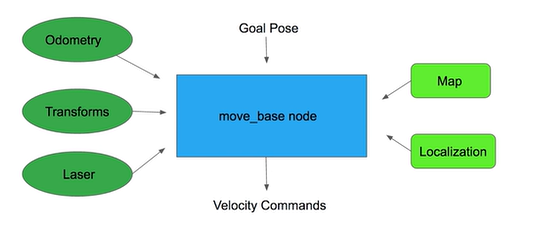

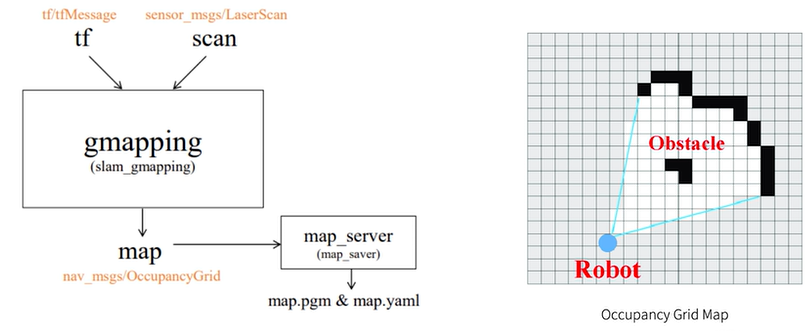
[Simulation] Navigation
kobuki = turtlebotHuskySummit XLROS 기반의 Navigation Stack 학습Navigation Stack으로 프로젝트 진행~/sim_ws/src에 programmers_turtlebot 파일 다운로드 받기아래 명령어로 dependency
2023년 6월 26일
·
0개의 댓글·
0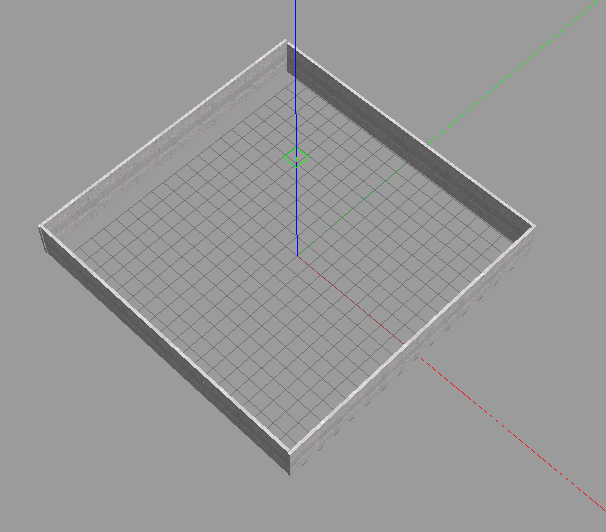
{-ing}[Simulation][Project][Gazebo] 시뮬레이션 기초 전부 활용해보자! 프로젝트
Simulation 기초 project
2023년 6월 25일
·
0개의 댓글·
0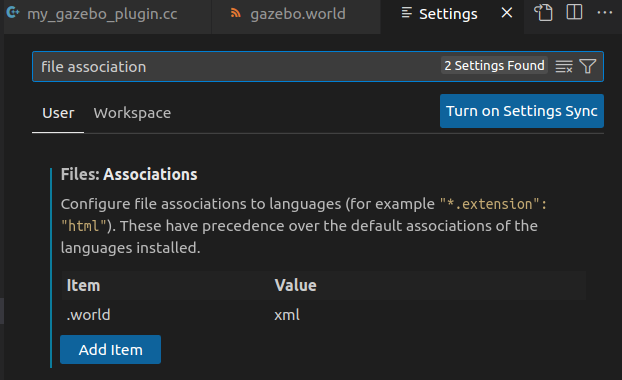
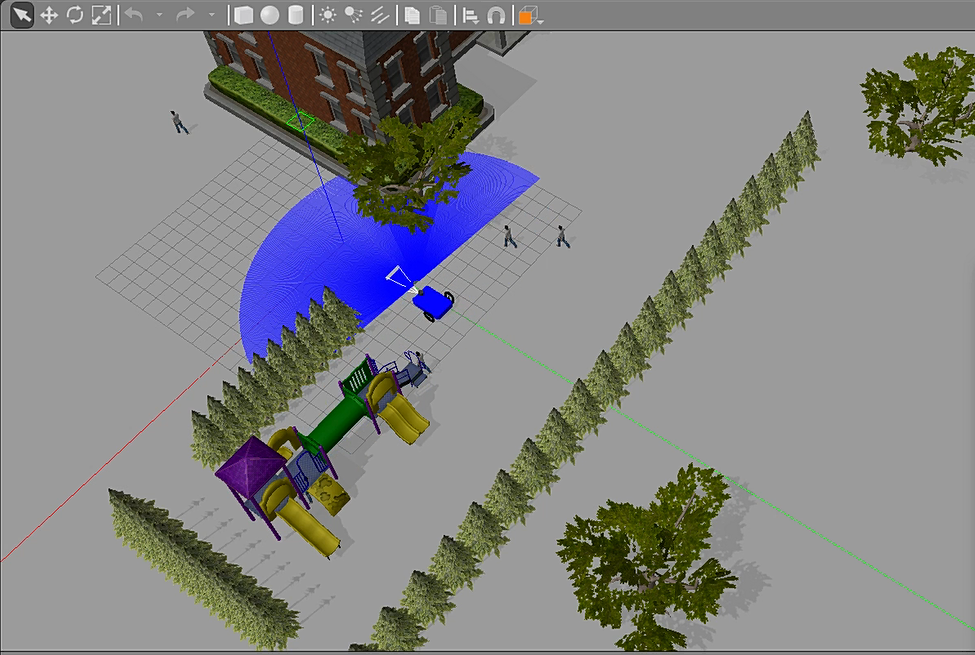
[Simulation] 나의 world에서 키보드로 로봇 움직이기
나만의 World 만들기다양한 모델과 population을 이용하기world를 열기 위한 launch 파일 작성하고 실행시키기로봇 spawn하여 teleop_twist_keyboard로 주행해보기..나의 world concept:
2023년 6월 22일
·
0개의 댓글·
0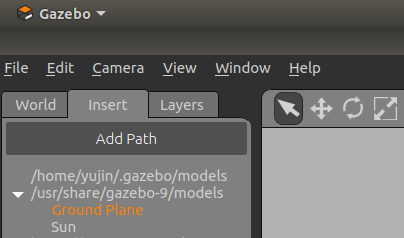
[Simulation] World & 모델 만들기
UI 상에서 Map을 만드는 것이 가장 쉽다.Insert 탭에서 다양한 것들을 추가할 수 있다.save를 통해 world를 저장할 수 있다..world 파일에 직접 추가하는 방법도 있다.gazebo 버전이 달라 위처럼 쳐서 안될 수도 있다.그럴때는 empty_world
2023년 6월 22일
·
0개의 댓글·
0