

[ubuntu] grub 꾸미기
갑자기 ubuntu 20.04를 쓸 일이 생겼다. Windows11, Ubuntu 22.04, Ubuntu 20.04 총 3개 OS를 멀티 부팅 해야한다. 20.04를 설치하니 기존 22.04에서 설정한 grub 세팅이 적용이 안 된다. 20.04에서 다시 설

[cuda] windows 11 개발환경
환경 : windows 11, python 3.11.9NVIDIA GeForce RTX 3060 Laptop GPU설치된 여러 버전의 python을 확인할 수 있다.OS에 여러 버전의 python이 설치되어 있다면 이렇게 버전을 지정해 줄 수 있다. 아래 명령어로 가상
[ROS2] Allied Vision : Alvium 1800 U-240
환경 : ubuntu 22.04, ros2센서 : Alvium 1800 U-240 usbros2 driver 설치또는Vimba X SDK 설치 cd ~/Downloads sudo tar -xzf ./VimbaX_Setup-2023-4-Linux64.tar.gz -C
[ROS2] logger color
해당 joystick 패키지를 만들고 상한선과 하한선을 설정하고 logger level 을 warn으로 설정했다.개별 터미널에서 ros2 run 명령어를 이용해서 실행할때에는 warn color인 노랑색이 잘 보이지만해당 노드들을 launch file로 실행할때에는 i
[ubuntu] git setup
원하는 디렉토리에서기존 repo와 연동default는 900이다.본인 pc가 아니라면 지우는 것도 잊지 말자git add .git commit -agit push origin branch_name ex) git push origin maingit push origin

[ubuntu] video0 과 video1
환경 : ubuntu 22.04툴 : v4l2-utilsdevice 디렉토리에서 웹캠을 확인해보면video0 video1 두 개가 잡힌다.원인를 확인해보자.video1은 해당 웹캠에 대한 metadata를 담고있다.캠이 한개 있더라도 video0, video1 이렇듯
[ROS2] Cartographer_ros
환경 : ubuntu 22.04, ROS2 humnleHW : Velodyne-vlp16ROS 공식 github에서 해당 패키지를 받는다. https://github.com/ros2/cartographer_ros해당 파일은 configuration file로
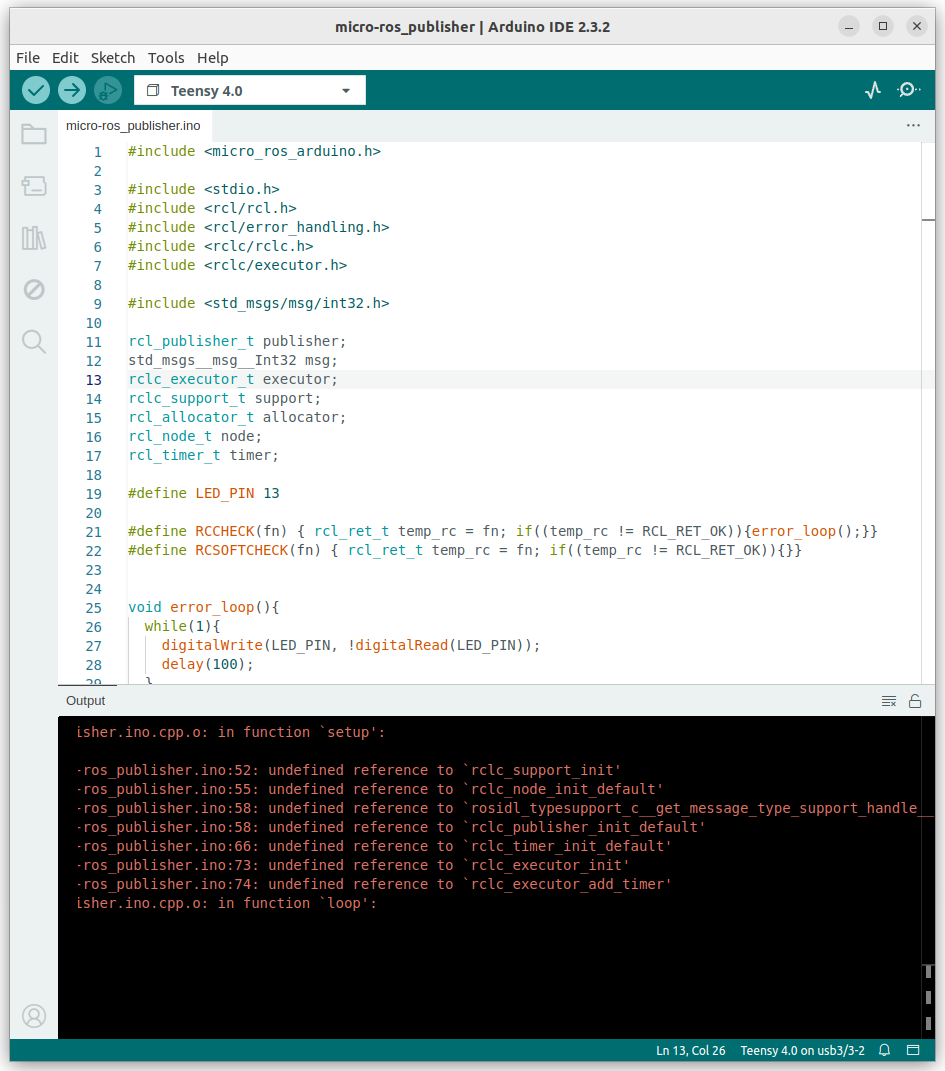
[Teensy 4.0] Arduino 2.3.2 with micro-ros
환경: ubuntu 22.04, ROS2 humble, amd64앞선 1.8.19 버전과 겹치는 내용은 생략https://www.arduino.cc/en/softwarearudino 2.3.2 appimage 다운로드https://www.pjrc.co

[Teensy 4.0] Arduino 1.8.19
https://stupidly-honest.tistory.com/39https://www.pjrc.com/teensy/td_download.htmlhttps://puzzling-cashew-c4c.notion.site/39d2efb53e294
[ROS2 nav2] simulation test command
ros2 launch nav_lv subpub.launch.py ros2 launch turtlebot3navigation2 navigation2.launch.py usesim_time:=True ros2 launch turtlebot3gazebo turtlebot3world.launch.py ros2 topic pub /rlrobotgoal...

[ros2 bag] DDS 설정
환경: ubuntu 22.04, ros2 humble, cycloneddsros2 nav2 navigation 프로젝트최종 버전 배포 전 ros2 bag 패키지도 추가하려고 했으나실행하자 다음과 같은 오류가 발생했다.ros2 bag을 마지막에 추가했기 때문에 운좋게도
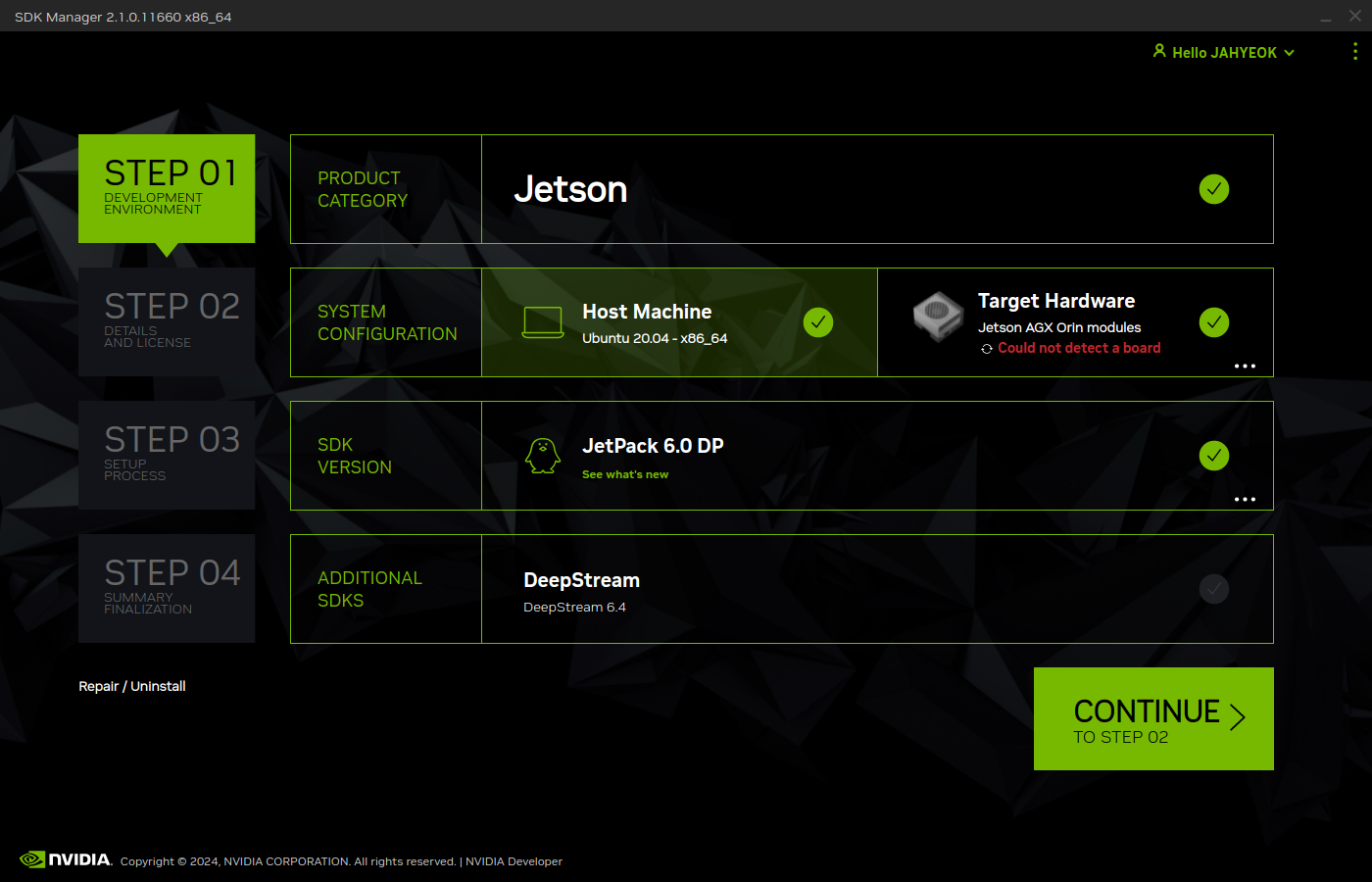
[NVIDIA] Jetson Orin AGX developer kit 64bit SDK MANAGER
HOST PC에 SDKMANAGER 를 설치한다. https://developer.nvidia.com/sdk-manager Jetson series 별 호환 Jetpack 버전을 확인한다. Orin AGX developer의 경우 Jetpack 6.
[ROS2] bag
환경: ubuntu 20.04, ROS2 FOXYpython launch 파일에서 실행할 때 NODE 형식으로는 지원을 안하는 것 같다.ExecuteProcess 형식으로 만들어준다.요런식으로
[ROS2] joystick
ps4 모델https://github.com/FurqanHabibi/joystick_ros2위 패키지로 실행가능하다.기존 로지텍 F701 모델에서 data frog ps4 로 변경 중상단부에 터치패드가 있다. 마우스로 사용가능하다.usb 동글이 따로 없는 모델
[ROS2] python parameter
https://github.com/RLmodel/sample_code위 링크에서 해당 내용 확인 가능요약 : cmd_vel을 launch file에서 변경문제점 : 패키지 환경은 ament_python. --symlink-install로 빌드해도 launch파
[python] pyinstaller & pyqt5 & arduino serial
https://github.com/RLmodel/KIRIA_TRmini1/tree/main/lift_column_demo위 링크에서 해당 내용 확인 가능
[ROS2] smc-2000, smc+
https://synerex.tistory.com/29씨너렉스 블로그에서 ros / ros2 연동 매뉴얼을 배포한다.ublox F9P을 기반이므로 ros2 환경에서도 같은 패키지(ublox-f9p)로 실행 가능하다.https://github.com/r