딥러닝
1.[DL] 명품 커머스 VoC 리뷰 분석 & KoBert 분류 모델

회사들은 한정된 자원으로 효율적인 배분을 통한 운영을 해나간다.적은 자원으로 최대의 효율을 낼수록 이익 증대와 더불어 다른 부분에 자원을 할당할 수 있는 기회를 얻을 수도 있다.코로나 19로 보복소비 성향이 두드러지고 MZ세대가 소비층으로 부상하며 명품 플렛폼 시장이
2.[DL] LSTM & Yolo를 활용한 절도 이상행동 탐지

1. 문제 정의 model : LSTM(Long Short-Term Memory) & YOLOv5 CCTV 절도 이상탐지를 위해 LSTM( Long Short-Term Memory) 기획한 이유는 다음과 같습니다. 1. 보안 및 안전 강화 : 범죄 예방과 안전 보안
3.[DL] Faster R-CNN(Object Detection-kaggle_Bus/Truck)

객체 탐지는 컴퓨터 비전과 이미지 처리와 관련된 기술로서, 디지털 이미지와 비디오로 특정한 계열의 시맨틱 객체 인스턴스를 감지하는 일을 다룬다.Faster R-CNN은 하나의 unified network로 Detection과제를 수행한다.feature maps는 RPN
4.[DL] SSD(Single Shot MultiBox Detector) - object detection

Object Detection(객체 탐지) 객체 탐지는 컴퓨터 비전과 이미지 처리와 관련된 기술로서, 디지털 이미지와 비디오로 특정한 계열의 시맨틱 객체 인스턴스를 감지하는 일을 다룬다. SSD(ECCV 2016) 'SSD'는 'Faster R-CNN'의 개선 버전이
5.[DL] YOLO(You Only Look Once) - object detection

객체 탐지는 컴퓨터 비전과 이미지 처리와 관련된 기술로서, 디지털 이미지와 비디오로 특정한 계열의 시맨틱 객체 인스턴스를 감지하는 일을 다룬다.yolo에서는 3단계를 통해 간단하고 실시간으로 객체 탐지를 할 수 있다.첫 단계는 이미지를 resize하고 두 번째는 con
6.[DL] EfficientDet - Scalable & Efficient object detection

Object Detection(객체 탐지) 객체 탐지는 컴퓨터 비전과 이미지 처리와 관련된 기술로서, 디지털 이미지와 비디오로 특정한 계열의 시맨틱 객체 인스턴스를 감지하는 일을 다룬다. EfficientDet 여러 아키텍쳐들의 방법들을 사람이 아닌 자동으로 찾는
7.[DL] Swin Transformer

Transformer
8.[DL] Finding Tiny Faces
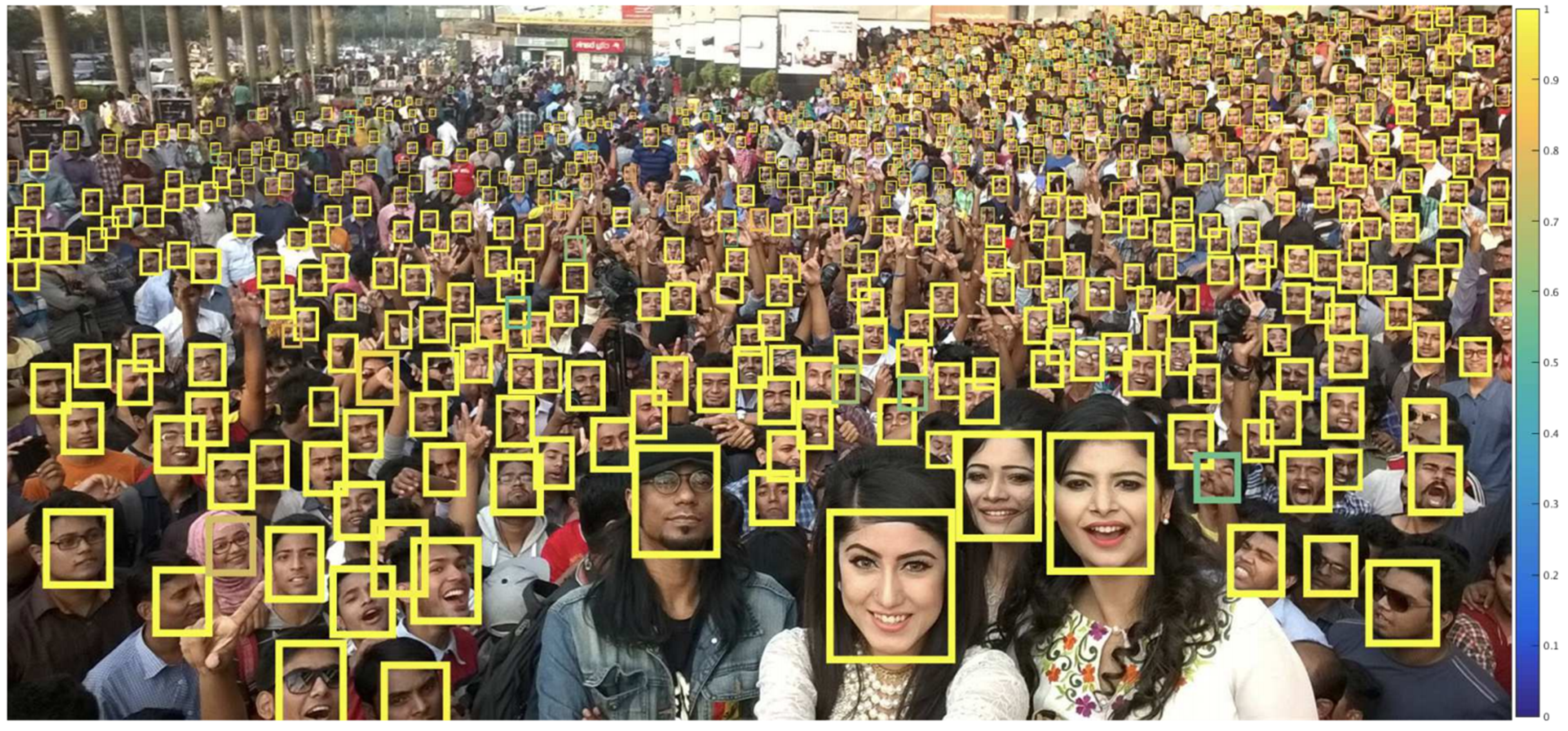
객체 탐지는 컴퓨터 비전과 이미지 처리와 관련된 기술로서, 디지털 이미지와 비디오로 특정한 계열의 시맨틱 객체 인스턴스를 감지하는 일을 다룬다.아주 작은 얼굴들을 탐지하기 위해서 어떤 기술적 테크닉들이 필요한지 살펴보자.객체 탐지를 위해 5가지의 approaches를
9.[DL] Mask R-CNN - Instance Segmentation

Mask R-CNN(ICCV 2017) R-CNN의 마지막 논문으로, 기존의 classification, object detection과는 다른 task를 수행한다. Semantic Segmentation은 클래스별로 영역을 필셀별로 구분하는데, 같은 클래스는 같은
10.[DL] U-Net - Semantic Segmentation

처음에는 바이오 메디칼 이미지의 Segmentation을 수행한 연구인데, 바이오 메디칼 뿐만이 아니라 다양한 영역에서 U-Net 스타일의 아키텍쳐를 활용이 된다.U-Net은 아키텍쳐 모양이 'U'자형으로 되어 있어 붙여진 이름이다. 기존 CNN은 input imag
11.[DL] U-Net PlusPlus - Semantic Segmentation

U-Net은 아키텍쳐 모양이 'U'자형으로 되어 있어 붙여진 이름이다.기존 CNN은 input image의 레졸루션을 줄여가며 연산을 수행한 반면, U-Net은 레졸루션을 기존처럼 줄여가며 컨볼루션 연산을 수행하고 그 다음에는 2배씩 레졸루션을 키워가며 컨볼루션 연산을
12.[DL] DeepLabV3Plus

아래의 그림과 같이 사람과 background를 구분하는 것처럼, 입력 이미지에서 의미를 갖는 영역을 필셀별로 구분해내는 작업을 Semantic Segmentation이라고 한다.DeepLab versionsDeepLab V1 : ICLR 2105DeepLab V2 :
13.[DL] MAML(Model-Agnostic Meta-Learning)

소스 코드 : GitHub다양한 task들의 딥러닝 알고리즘에서 큰 데이터셋이 필요하다. 하지만 실제 당면한 task에서는 데이터셋을 수집하는 것이 매우 어려운 경우가 존재한다. 예로 일반 주행도로의 이미지는 쉽게 얻을 수 있을지 모르겠으나, 눈이나 비가 오거나 천둥이
14.[DL] Point Transformer - indoor segmentation

Point Transformer(ICCV, 2021) PointNet Point Transformer에 앞서 PointNet를 먼저 살펴보자면, 구조는 아래 그림과 같다. 먼저 classification Network를 거치는데, input cloud points가
15.[DL] VoteNet - Indoor Object Detection

VoteNet(CVPR, 2020)
16.[DL] SPVNAS - Outdoor Sematic Segmentation

SPVNAS(EECV, 2020) Outdoor Scenes Outdoor Scenes은 다음과 같은 특징이 있다. 먼저 Light Detection And Ranging(LiDAR) 센서를 이용해서 주로 데이터를 얻는데 아래의 그림과 같이 생겼다. 센서를 통해서
17.[DL] VoxelNet - Outdoor Object Detection

VoxelNet Region Proposal Network 3D Object Detection의 특징은 3D를 BEV(Bird-eye_view), 즉 조감도처럼 2D의 이미지를 먼저 보고, 2D에서 region proposal을 하고 그 region에서 깊이까지 예
18.[DL] NeRF

NeRF(ECCV, 2020) NeRF는 NeRF:Representing Scenes as Neural Radiance Fields for View Synthesis라는 논문으로 제안된 모델이다. Novel View Synthesis NeRF이 수행하는 task