논문 리뷰 및 실습
1.Paper Summary List
연구하거나 공부하면서 읽은 논문 summary 리스트입니다.
2.[논문 리뷰 및 실습]Basic Generative Adversarial Networks (GANs)
Generative Adversarial Networks [NIPS 2016 Tutorial: Generative Adversarial Networks](https://arxiv.org/pdf/1701.00160.pdf) https://learnopencv.com/in
3.[논문 리뷰 및 실습]Conditional GAN
CGAN Paper: Conditional generative adversarial nets
4.[논문리뷰] UNSUPERVISED REPRESENTATION LEARNING WITH DEEP CONVOLUTIONAL GENERATIVE ADVERSARIAL NETWORKS(DCGAN), ICLR, 2016
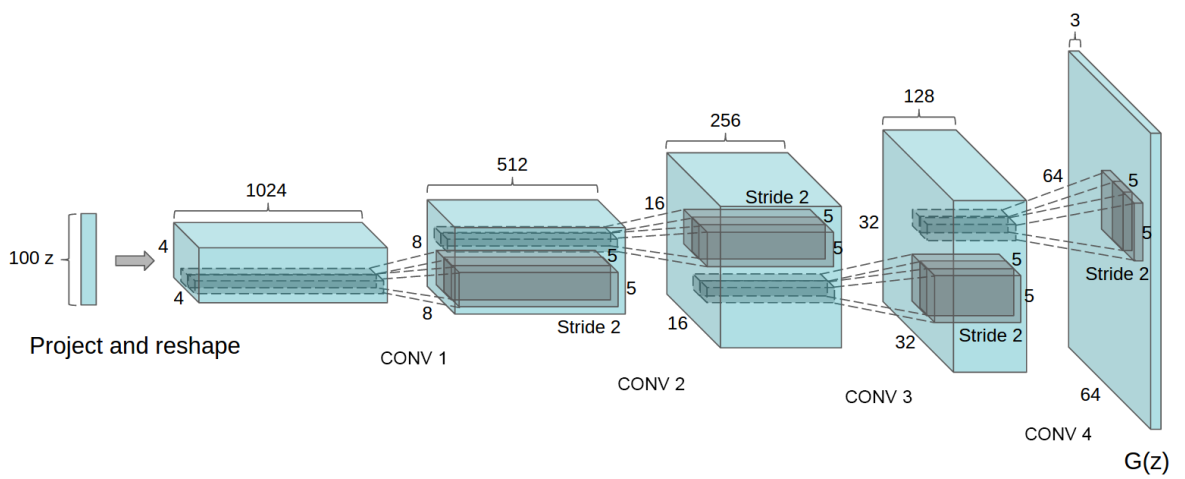
본 논문발표 당시에는, CNN이 unsupervised learning에서는 아직 큰 성공을 이루지 못했습니다. 저자들은 DCGANs이라는 CNN기반의 GANs 네트워크를 제시하며, unsupervised learning에서도 강력히 사용될 수 있다고 합니다. Obje
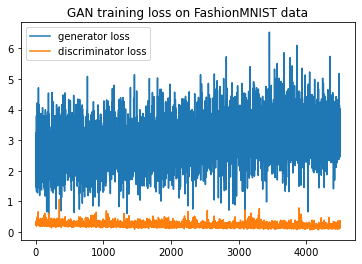
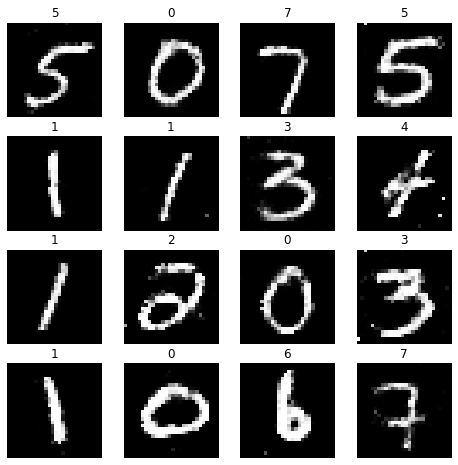
5.[논문실습]DCGAN
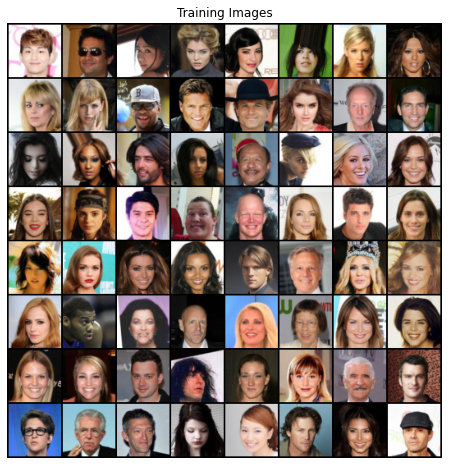
이 포스트는 ICLR, 2016에 발표되었던 UNSUPERVISED REPRESENTATION LEARNING WITH DEEP CONVOLUTIONAL GENERATIVE ADVERSARIAL NETWORKS(DCGAN) 논문의 실습입니다. Summary link -
6.[논문리뷰] DeepFool: a simple and accurate method to fool deep neural networks, CVPR, 2016
「 DeepFool: a simple and accurate method to fool deep neural networks」, CVPR, 2016 - Seyed-Mohsen Moosavi-Dezfooli, Omar Fawzi, Pascal Frossard5\. Con
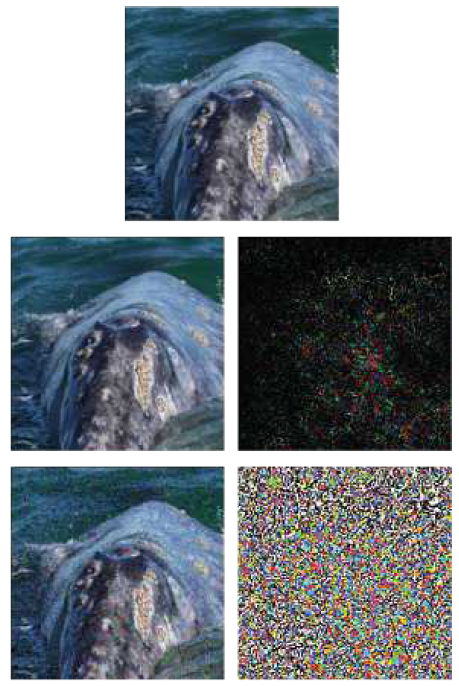
7.[논문리뷰] Universal adversarial Perturbations, CVPR, 2017
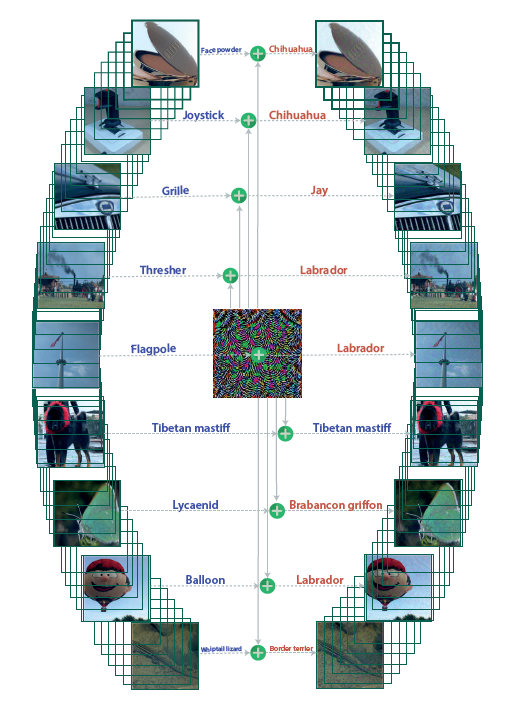
「Universal adversarial Perturbations」, CVPR, 2017 - Seyed-Mohsen Moosavi-Dezfooli, Omar Fawzi, Alhussein Fawzi, Pascal Frossard이 논문은 Universal(이미지에 적용
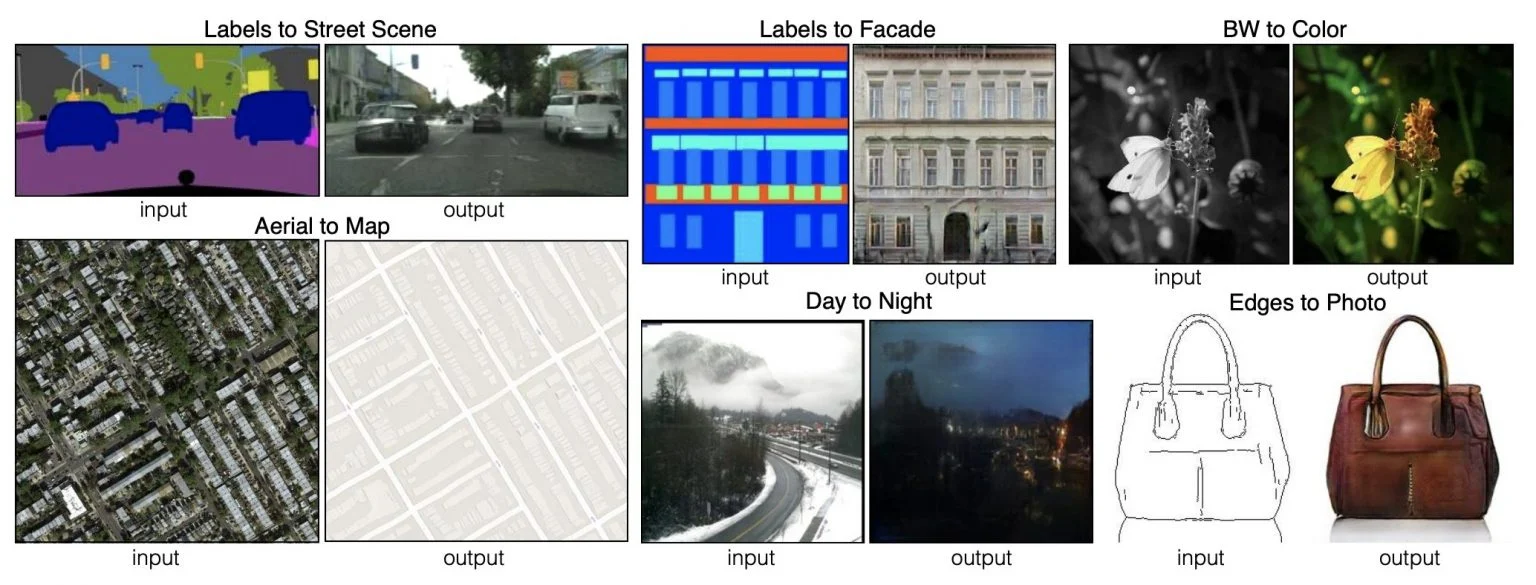
8.[논문리뷰] Image-to-Image Translation with Conditional Adversarial Networks, 2017, CVPR

paper : link본 논문은 흔히 Pix2Pix로 알려진 아키텍쳐를 제시한 논문입니다. CGAN을 기반으로 하였기에, 입력에 Condition과 Input image를 같이 넣어서 trnslated된 이미지를 출력하게 됩니다. Condition에 부합한 이미지를 생
9.[논문실습] Pix2Pix
이 포스트는 CVPR, 2017에 발표되었던 Image-to-Image Translation with Conditional Adversarial Networks(Pix2Pix) 논문의 실습입니다. Summary link -> linkUnpaired Image-to-Im
10.[논문리뷰] Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks, 2017, CVPR
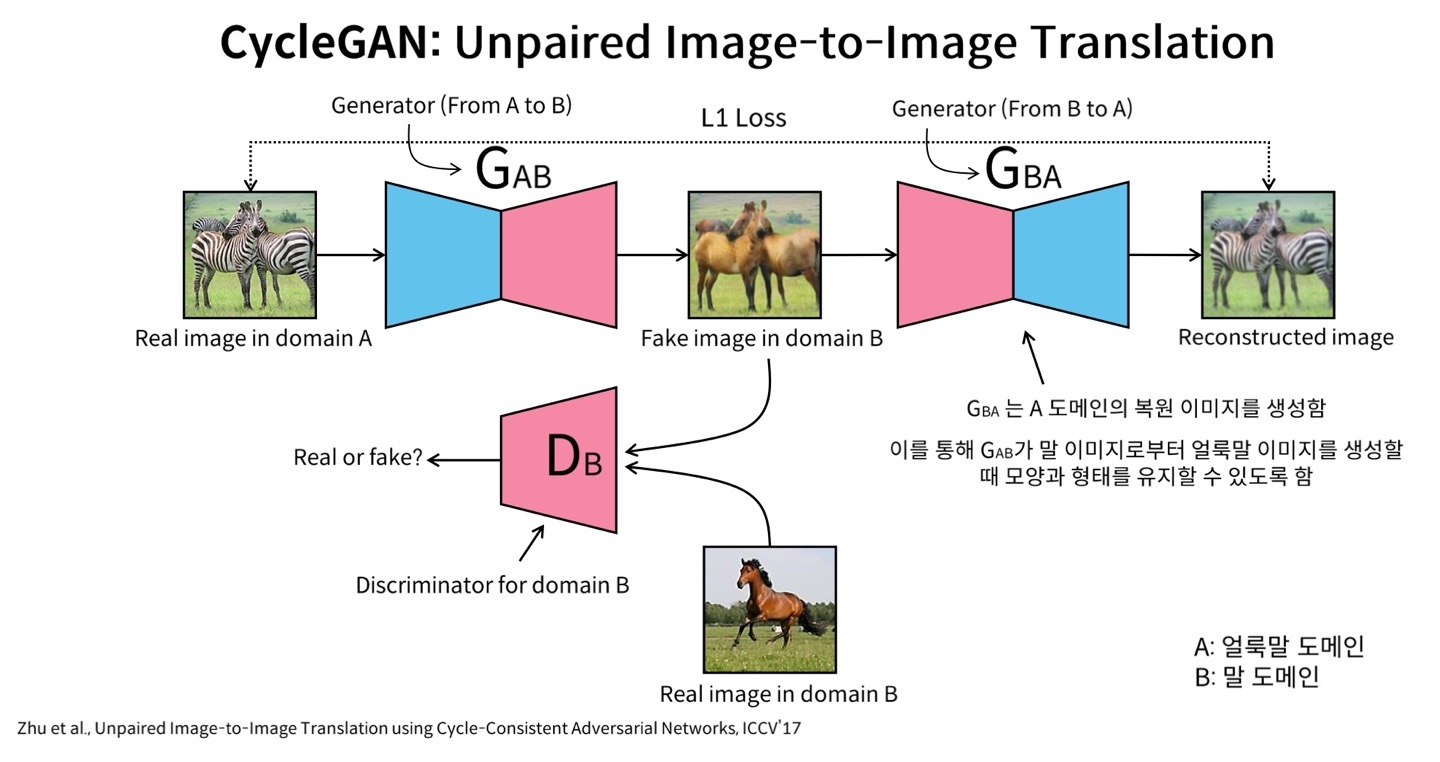
paper : Link이전에 발표되었던 Pix2Pix가 paired training data를 필요로 하였다면, CycleGAN은 unpaired한 training data를 대상으로 합니다. 위의 그림에서 G(AB)를 통해 생성된 이미지들과 Real images를 D
11.[논문리뷰] DECISION-BASED ADVERSARIAL ATTACKS: RELIABLE ATTACKS AGAINST BLACK-BOX MACHINE LEARNING MODELS, ICLR, 2018
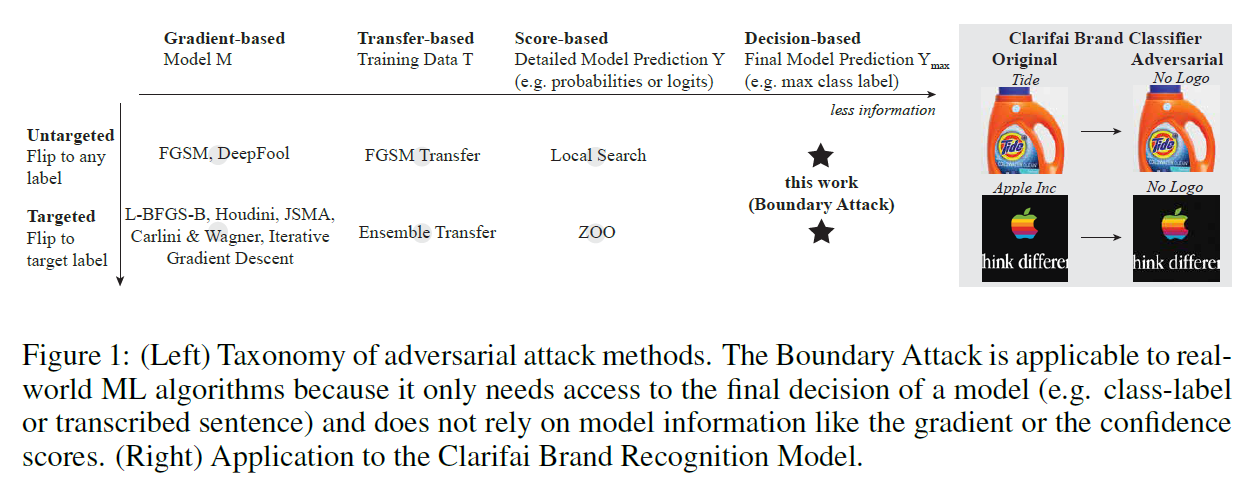
Abastract 1. Introduction 2. Boundary Attack 3. Comparision with other Attacks 4. THE IMPORTANCE OF DECISION-BASED ATTACKS TO EVALUATE MODEL ROBUSTNE
12.[논문리뷰] Generative Adversarial Perturbations, 2018, CVPR
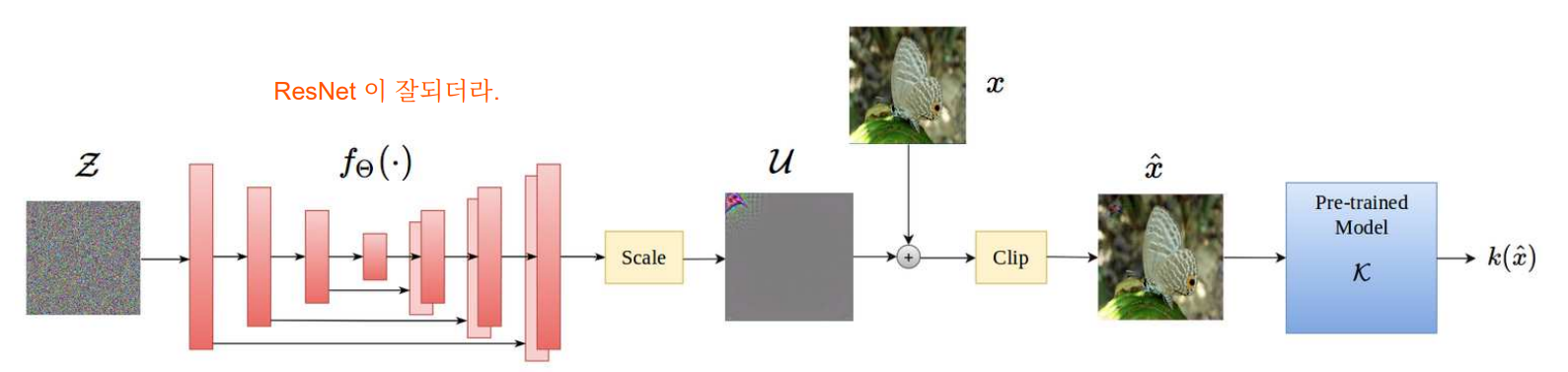
paper : Generative Adversarial perturbations, 2018, CVPR본 논문은 adversarial examples을 만드는 generative model을 제시하고 있습니다. 이미지들을 adversarial examples로 변환하는
13.[논문리뷰] Universal adversarial perturbations for CNN classifiers in EEG-based BCIs, IOP(Journal of neural engineering), 2021
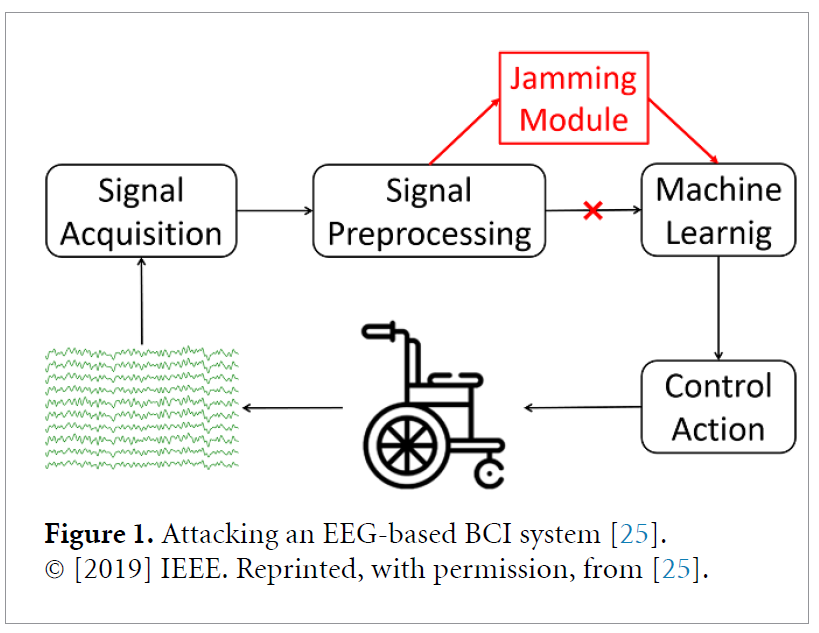
「 Universal adversarial perturbations for CNN classifiers in EEG-based BCIs」 ,IOP - Journal of Neural Engineering, 2021 - Zihan Liu, Lubin Meng, Xiao
14.[논문 리뷰] StarGAN : Unified Generative Adversarial Networks for Multi-Domain Image-to-Image Translation
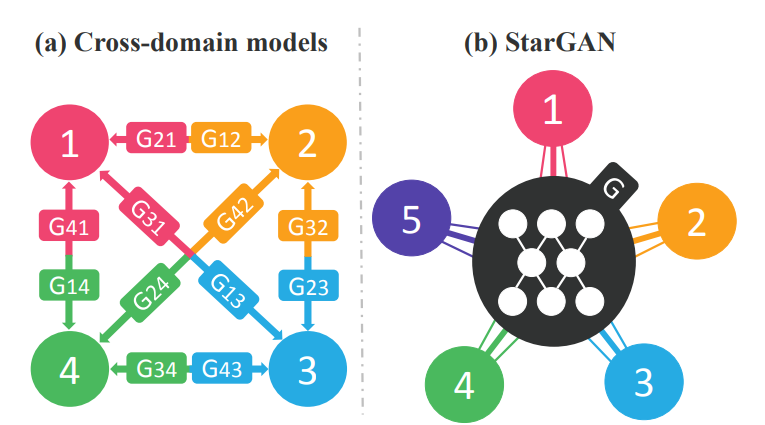
My Summary기존의 cycleGAN과 같은 Image-to-Image translation 모델의 단점으로는 fixed된 domain간의 translation이 가능하므로 최대 2개의 domain간 가능하다는 점입니다. 여러 domain에 대해서는 위의 그림처럼
15.[논문리뷰] RepVGG: Making VGG-style ConvNets Great Again , 2021, CVPR
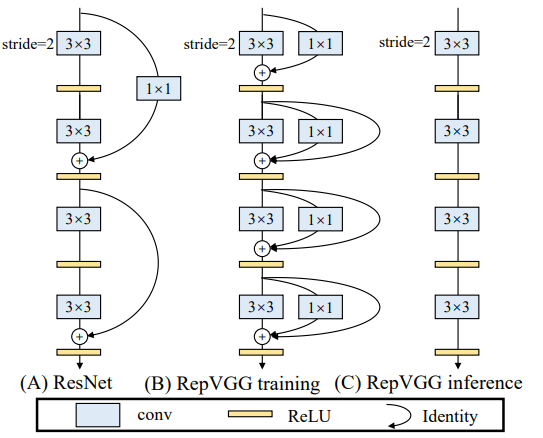
본 논문에서는 VGG 스타일의 ConvNet을 제시하는데요, training time시에는 multi-branch topology로 구성되지만, inference time시에는 re-parameterization 기법을 사용하여 구조를 바꿔서 오직 3x3 convolu
16.[논문리뷰] Point Cloud Pre-training with Natural 3D Structures, 2022, CVPR

최근 robotics와 자율주행 등에서 3D point cloud이 활발히 사용되고 있지만, 3D point clouds dataset을 만들기 위해서는 많은 노력이 필요하다고 합니다. 특히 model collection이나 annotation의 경우 많은 사람의 노력
17.[논문리뷰] 3DMatch: Learning Local Geometric Descriptors from RGB-D Reconstructions, 2017, CVPR
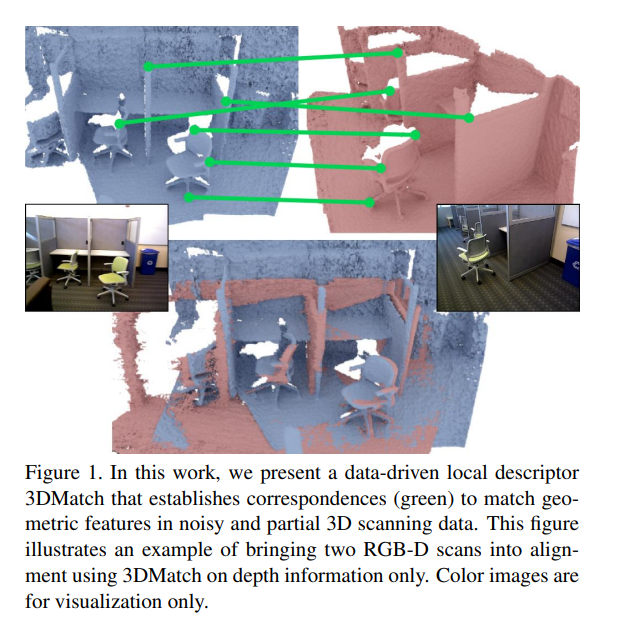
Local geometric feature들을 매칭하는 것은 noise, low-resolution, 3D 스캔 데이터의 불완전성으로 인해 어려운 task입니다. 본 논문에서는 기존의 geometric한 특성들의 histogram을 기반으로한 SOTA를 뛰어넘는, da
18.[논문리뷰] gMapping SLAM
논문제목: Improved Techniques for Grid Mapping with Rao-Blackwellized Particle Filters발표 학회 및 년도: IEEE Transactions on Robotics, 2007gMapping SLAM은 ROBOTI
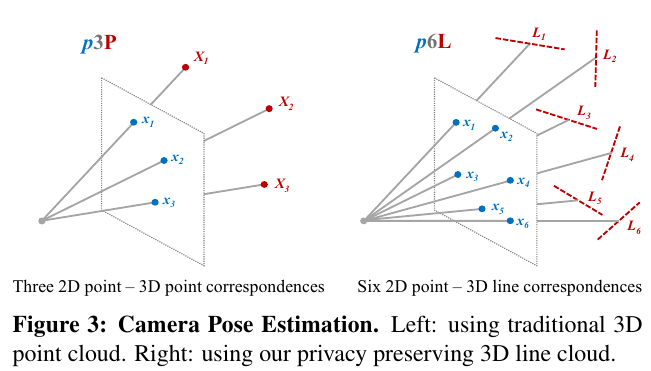
19.How Privacy-Preserving are Line Clouds? Recovering Scene Details from 3D Lines
본 논문에서는 privacy-preserving localization을 위해서 sparse한 point clouds를 그대로 두는 것이 아닌, line clouds라는 개념을 제시하며, 3차원 geometry 정보는 보존하면서도, 3D points position을
20.Privacy Preserving Image-Based Localization
본 논문은 line clouds라는 개념을 처음 도입한 논문입니다. line clouds란 point clouds의 각 point에서 임의의 방향(uniform하게)으로 line을 만들면, InvSfM에서 사용 불가능하다는 것을 제시하는 논문입니다.기존의 traditi
21.[논문리뷰] OpenScene, CVPR 2023
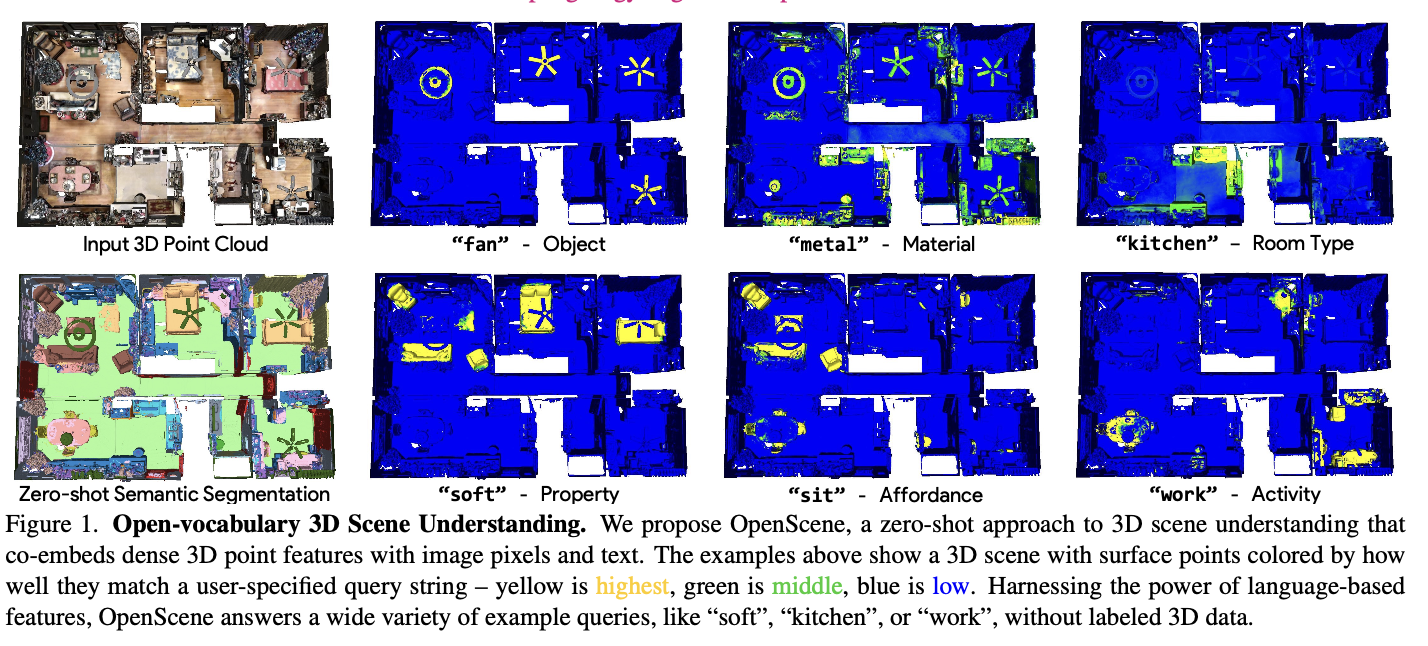
Pretrained CLIP을 이용하여 3D scene understanding을 하고자 한다. 이를 위해 3D point cloud와 multi-view 2D images를 입력으로 받아, 각 3D point에 해당하는 특징과 pretrained 2D encoder로
22.[논문리뷰] Density-invariant Features for Distant Point Cloud Registration, ICCV 2023
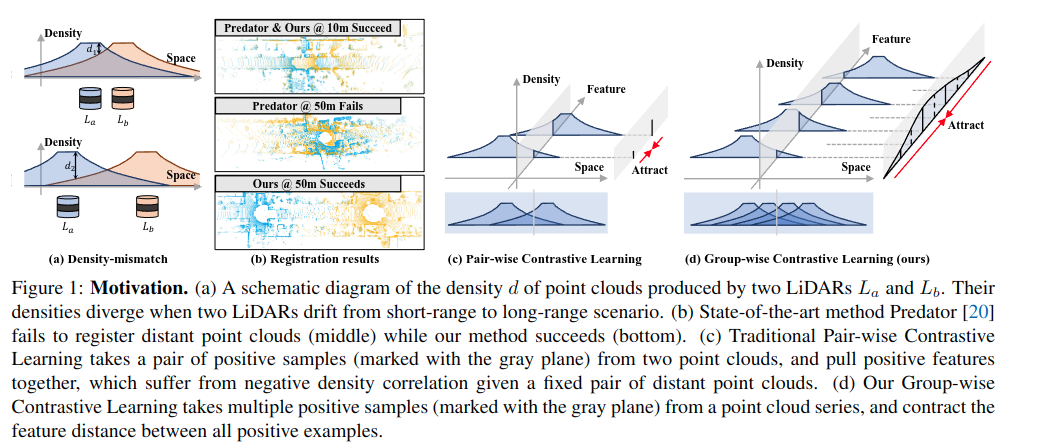
Distant한 LiDAR point cloud registration 문제를 해결하기 위해, Group-wise Contrastive Learning (GCL) 기법을 제안. 기존 방법은 point cloud density 차이로 성능이 저하되었으나, GCL은 pos
23.[논문 리뷰] Matching 2D Images in 3D: Metric Relative Pose from Metric Correspondences (MICKEY), CVPR 2024
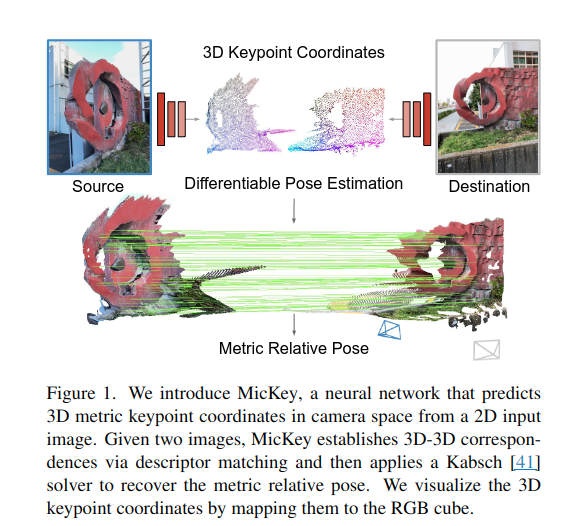
문제정의
24.[논문리뷰] Three Pillars improving Vision Foundation Model Distillation for Lidar, CVPR 2024
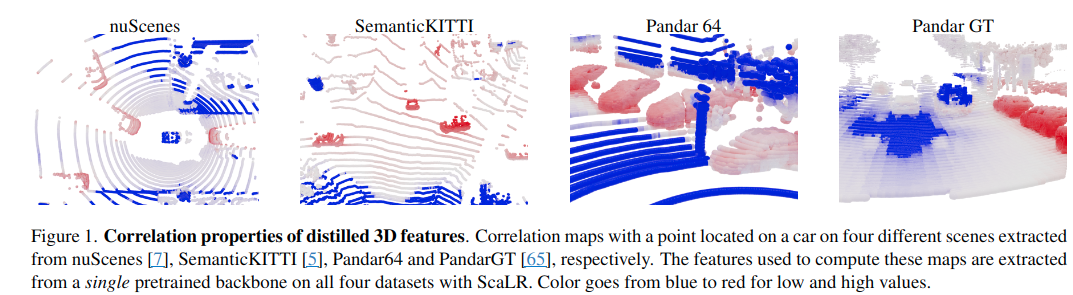
최근 LiDAR에 2D vision foundation 모델을 많이 적용하려하는 시도가 많이 존재한다.
25.[논문리뷰] VoxelNextFusion: A Simple, Unified and Effective Voxel Fusion Framework for Multi-Modal 3D Object Detection, arXiv 2024
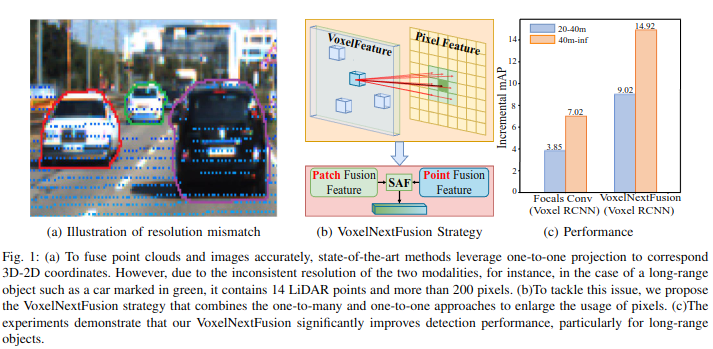
LiDAR Camera sensor fusion시, 각각의 modality에서 얻은 feature를 어떻게 fusion할 수 있는지 방법을 제안하는 논문이다.
26.[논문리뷰] PoseDiffusion: Solving Pose Estimation via Diffusion-aided Bundle Adjustment, ICCV 2023
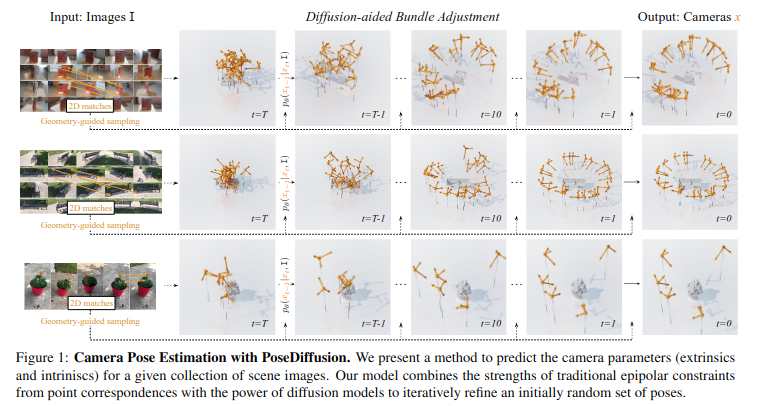
SfM problem을 probabilistic diffusion framework로 모델링하여, input 이미지들이 주어졌을 때 카메라 포즈를 conditional하게 모델링 진행. 다음과 같은 장점이 있다고 주장함: 1) 디퓨전 프로세스가 내재적으로 bundle
27.[논문리뷰] DiffLO: Semantic-Aware LiDAR Odometry with Diffusion-Based Refinement, CVPR 2025
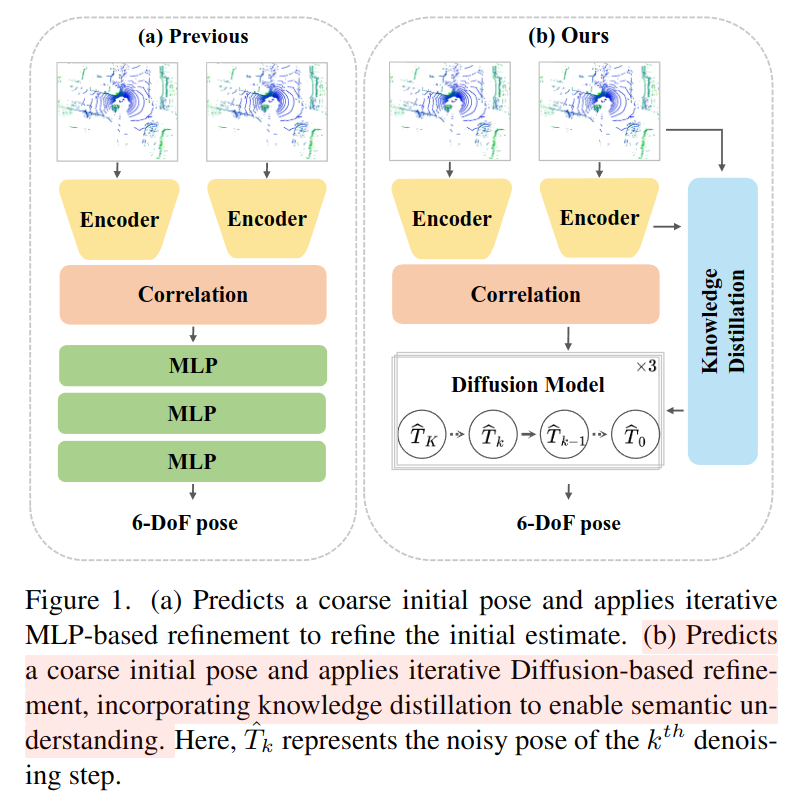
최근 Pose Diffusion 논문을 리뷰했던 적이 있는데, 이 논문을 Pose DiffusionOverview
28.UltraFusion: Ultra High Dynamic Imaging using Exposure Fusion
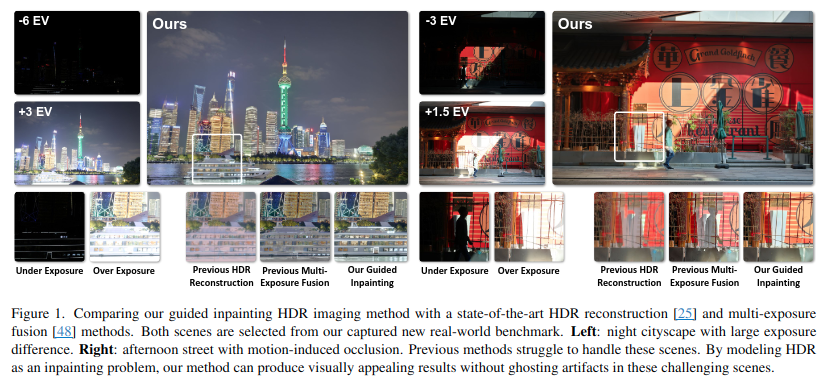
고명암비(HDR) 장면을 캡처하는 것은 카메라 설계에서 가장 중요한 문제 중 하나입니다. 대부분의 카메라는 서로 다른 노출 수준에서 촬영된 이미지를 결합하는 노출 합성(Exposure Fusion) 방식을 사용하여 명암비를 증가시킵니다. 그러나 이 접근 방식은 보통 3