
- 전체보기(43)
- cpp(12)
- Error Report(10)
- python(9)
- 생산성(6)
- ubuntu(5)
- PyTorch(5)
- SLAM(5)
- Robotics(4)
- Mathematics(3)
- vscode(3)
- git(3)
- Theory(3)
- cuda(3)
- GitLab(2)
- cmake(2)
- install(2)
- GCC(2)
- LiDAR(2)
- debugging(2)
- paper-review(2)
- PCL(2)
- make(2)
- ROS(2)
- tech(1)
- VO(1)
- debug(1)
- torch(1)
- opencv(1)
- Calibration(1)
- VPS(1)
- tools(1)
- vslam(1)
- Kernel(1)
- CloudCompare(1)
- OpenGL(1)
- Research(1)
- NeRF(1)
- 서버(1)
- scan alignment(1)
- setting(1)
- GIMP(1)
- anaconda(1)
- seminar(1)
- NDT(1)
- tensorboard(1)
- PGO(1)
- window(1)
- Visual SLAM(1)
- Point Cloud(1)
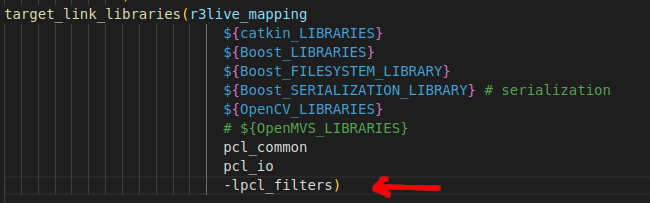
pcl) make 시 undefined reference to ~ applyFilter 에러
이런식으로 어떤 point type에 대해 갑자기 applyFilter가 없다는 에러가 뜨면CMakeLists.txt에서 target_link_libraries에서 pcl을 링크하는 부분에 -lpcl_filters를 추가해주면 해결됨.
callable 인자에 함수+input parameter 같이 전달하기
open3D로 GUI 작업을 하던 중 button을 누를때 소환할 콜백함수가 인자를 필요로 할 경우 어떻게 처리할지 헤매다가 아래 방법 발견cpp에서는 ros callback이나 thread함수 쓸 때 많이 있어왔던 상황이지만 파이썬으로는 처음 구현해봤다cpp의 바인딩
blueman) Connection Failed: Protocol not available
blueman 통해서 우분투 PC에 헤드셋을 연결해서 쓰고있는데 이게 종종 말썽을 부린다.터미널에서 실행해서 여러 에러메세지들을 타고타고 해결을 하려고 해도 도돌이표처럼 최종적으로는 Connection Failed: Protocol not available 메세지를 마
Evaluation and comparison of eight popular Lidar and Visual SLAM algorithms 리뷰
8개의 open-source LiDAR/visual SLAM 시스템을 동일 환경에서 실험해 성능 비교 (LOAM, Lego-LOAM, LIO-SAM, HDL-Graph SLAM, ORB-SLAM3, SVO2, Basalt VIO, Kimera VIO)

Vox-Fusion: Dense Tracking and Mapping with Voxel-based Neural Implicit Representation 리뷰
공유용으로 영어로 작성했는데 그대로 올림 논문 링크: https://arxiv.org/abs/2210.15858 이제 완전히 feature grid embedding + octree가 기본 구조로 자리잡은 듯 하다. spatial한 구조가 나름 최적화 된 것 같으니 여러 센서와의 퓨전 (특히 라이다와의 찰떡궁합을 예상)으로 쭉쭉 영역을 넓혀 나갈거라고 예...
LiDAR self compensation 시도
LiDAR를 SLAM에 사용할 때 imu 값을 이용한 motion compensation을 전처리단에서 수행하는 경우가 많다. 왜냐하면 주행 차량에서 취득하는 경우와 같이 빠른 속도로 움직이는 경우 라이다 앵글컷 시작점과 종료점이 꽤 큰 차이를 가질 수 있기 때문이다.
Better Performance at Lower Occupancy
일반적 주장:멀티프로세서에 더 많은 쓰레드를 올리자블록에 더 많은 쓰레드를 올리자왜냐면 이게 레이턴시를 숨기는 유일한 방법이니까!하지만 아래 두 개념은 잘못되었음멀티쓰레딩이 GPU에서 레이턴시를 숨기는 유일한 방법이다공유메모리가 레지스터만큼 빠르다레이턴시 숨김 (Hid
CUDA Warps and Occupancy
SM은 streaming multi-processor with multiple processing cores각 SM은 32개의 프로세스 코어를 가짐.Single Instruction Multiple Thread (SIMT) 개념으로 실행됨최대 16개의 SM (현재는?)
arxiv 논문 뷰어(?) 사이트
arxiv의 논문을 볼 때 pdf 형태로 보통 많이 보는데,https://arxiv.org/abs/2207.00225이 논문(내 논문..ㅎㅎ)의 주소에서 arxiv의 x를 5로 바꿔주면, 즉https://ar5iv.org/abs/2207.00225이걸

cmake 버전 업그레이드
google OR-tools 설치하려고 보니 cmake 버전 3.15 이상이 필요하다고 한다.현재 버전은 3.10.2이걸로 이전 버전 cmake를 지우라는 얘기가 있는데 지울 필요 없음. 지우면 ROS 다 날라감.https://cmake.org/files/여기
ndt matching graph slam의 단점- z drift
https://www.google.com/search?q=ndt+matching+slam+z+drift&oq=ndt+matching+slam+z+drift&aqs=chrome..69i57j69i64l3.7379j0j7&sourceid=chrome&ie=UTF-8
PCL custom point type 정의해서 사용하기
참고 링크: https://stackoverflow.com/questions/39221424/pcl-instantiating-new-point-types-for-all-functions
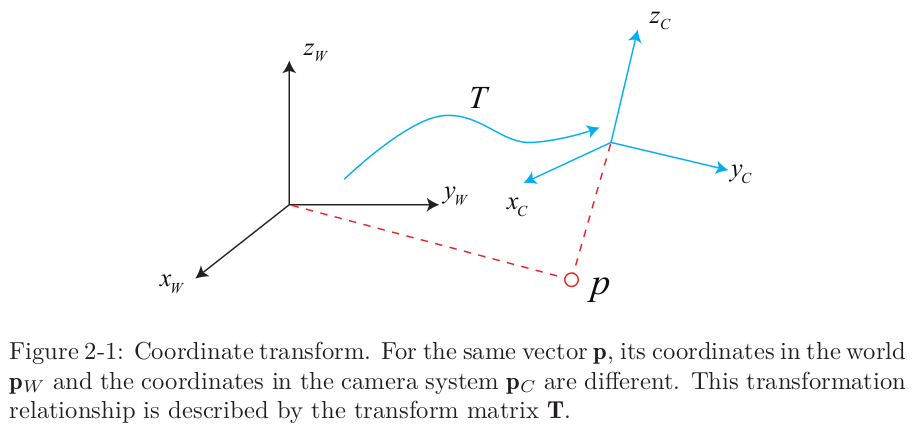
Introduction to Visual SLAM From Theory to Practice (2)
지난 시간에 우리는 visual SLAM의 전반적인 프레임워크와 내용을 살펴보았다. 이번 강의에서는 visual SLAM의 가장 기초적인 이론을 다룬다. 바로 3D 공간에서 어떻게 강체의 움직임을 나타낼 것인지에 대한 내용이다.
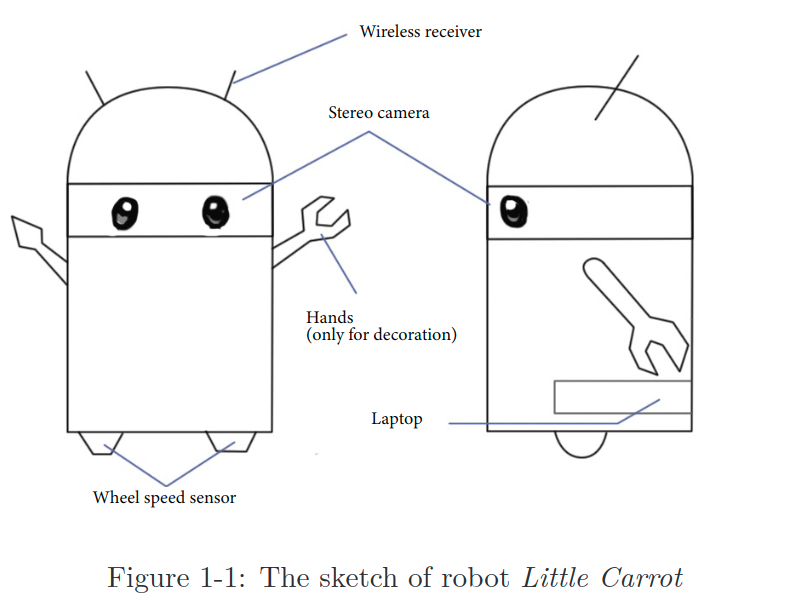
Introduction to Visual SLAM From Theory to Practice (1)
이번 강의에서는 따라오는 챕터에서 다룰 내용들의 개요를 잡는 느낌으로 visual SLAM 시스템의 구조를 요약 설명할 것이다. 실습 파트에서는 환경 설정과 프로그램 개발에 대한 기초를 설명한다. 귀여운 "Hellow SLAM" 프로그램을 만들어보는 것으로 마무리!
Introduction to Visual SLAM From Theory to Practice (0)
SLAM이라는 분야가 워낙 여러 연구분야를 다 갖다붙인 합성물같은 특성을 가지다보니 단일 연구분야로서는 꽤 광범위한 배경지식을 요구한다. 그래서 SPARK Lab에서 공개한 SLAM 라이브러리인 Kimera를 처음 보았을 때 SLAM 라이브러리가 가질 수 있는 가장 알
CUDA custom C++ extensions 개발
Plenoxel을 건드리는 과정에서 생전 접한적 없던 CUDA C를 이용한 custom CUDA kernel을 수정, 개발하게 되었음.사실 작업 시작한지 좀 돼서 기본적인 공부는 자료정리 없이 읽어보고 만져보고 시행착오를 반복한 끝에 어느정도 된 것 같은데 지금부터라도
bag file에서 이미지 간단하게 추출하기
http://wiki.ros.org/image_view이거를 켜고, rosbag play \[bag file] 해주면 rosrun 명령어를 실행한 터미널 경로에 이미지가 저장됨.

스택 오버플로우
함수 내에서만 쓰는 지역변수의 경우 사전 정의된 스택 영역만을 사용할 수 있는데, 그 안에서 함수 내의 모든 변수들의 할당과 해제가 이루어진다.재귀함수나 상호참조 등으로 스택메모리가 터지는건 봤는데 지역변수를 너무 크게 잡아서 터질거라고는 생각도 못하고 있다가 이번에