
- 전체보기(28)
- 아이펠(15)
- 모두의 연구소(14)
- CV(6)
- Generative AI(4)
- 생성형 ai(4)
- robot(2)
- ROS(2)
- paper-review(2)
- diffusion(1)
- VAE(1)
- gan(1)
- 자기회귀 모델(1)
- 블로그(1)
- Normalizing Flow(1)
- Robotics(1)
- YOLACT(1)
- style transfer(1)
- Autoregressive(1)
- ros2(1)
- segmentation(1)
- 모두의연구소(1)
- GAZEBO(1)
[만들면서 배우는 생성 AI] 6장 - 노멀라이징 플로 모델 (normalizing flow model)
이번 포스팅에서 변수 변환을 활용하여 데이터 분포를 직접 모델링하는 노멀라이징 플로 모델에 대해 알아보자!

[ROS2] 개념 및 용어 정리
ROS 2에서 robotic system을 구현하는 데 필요한 몇 가지의 개념이 있다. ROS 2 tutorial에서 공부한 내용을 바탕으로 정리해 보자! 1. Node(노드) ROS graph는 ROS 2에서의 모든 데이터를 동시에 처리하는 네트워크를 일컫는다. ROS graph에서 실행가능한 모든 파일은 연결되어야 하고, 이를 매핑하고 시각화할 줄도 ...
[만들면서 배우는 생성 AI] 4장 - 생성적 적대 신경망(GAN)
4장의 Generative adversarial network에 대하여 학습해 보자.
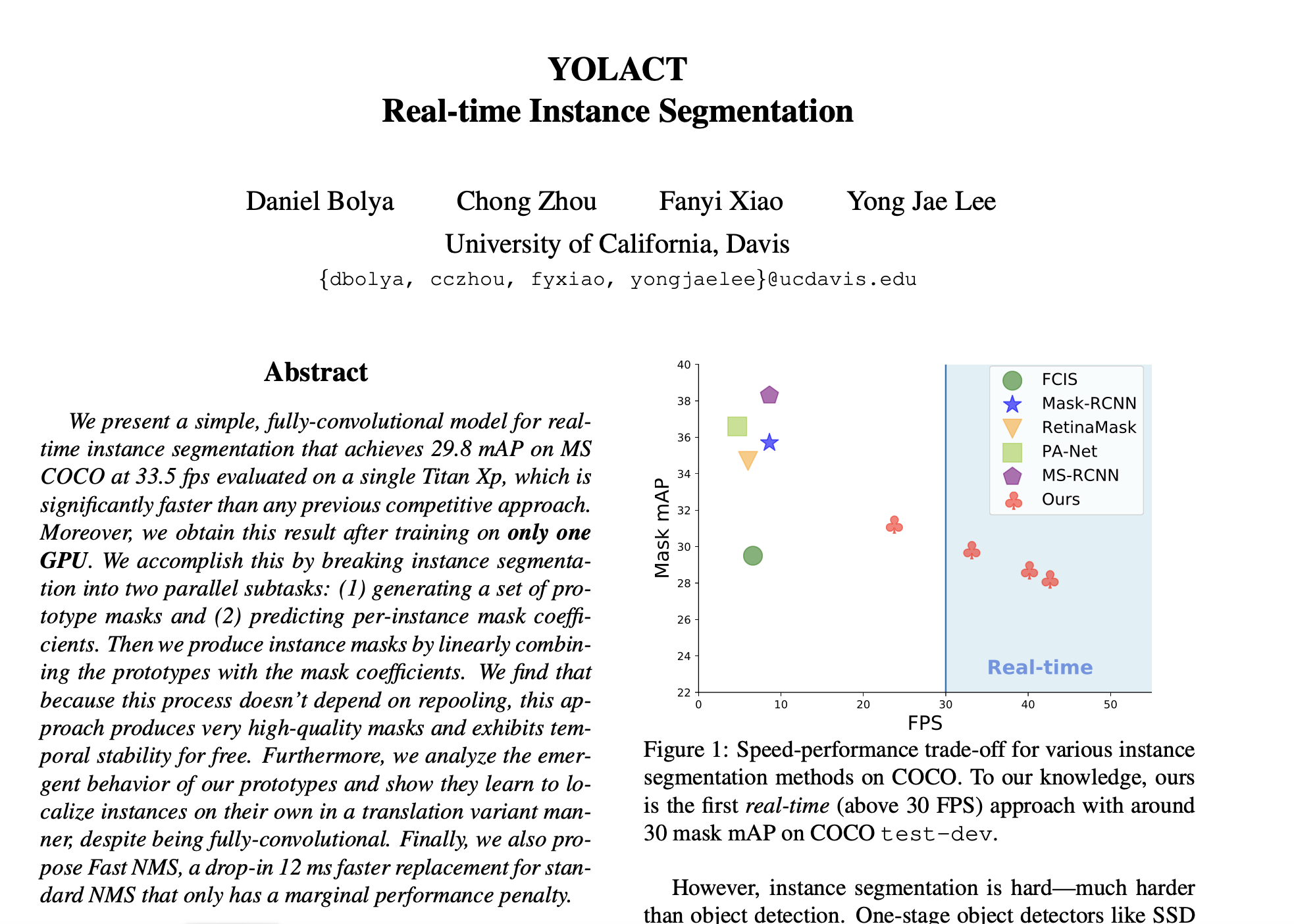
[Paper Review] YOLACT: Real-time Instance Segmentation
이번 포스팅에서는 ICCV 2019에 나온 YOLACT 논문을 리뷰할 예정이다.해당 논문은 '실시간'으로 이미지를 instance segmentation 문제를 해결하는 방법을 제시한다.

[Mac M1] ROS2 + Gazebo 설치하기
로봇 시뮬레이션을 위해 ROS2와 Gazebo를 다운받으려는데 자꾸 오류가 났다.UTM으로 ubuntu 22.04버전을 다운 받아 가상 머신에서 docker로 ROS2를 실행해 보았으나,Gazebo를 설치하고 실행하는 과정에서 계속 오류가 났었다..

ROS(robot operating system)의 등장 배경
최근 로봇에 AI를 접목시키는 것에 관심이 생겼다. 이와 관련된 공부를 하다가 ROS와 ROS 2에 대해 알아야 했다.인공지능 공부하는 데 파이썬을 알아야 하는 것과 같은 느낌이 들었다.그렇다고 ROS 2가 프로그래밍 언어 자체는 아니다. 따라서 이번 포스팅에서는 RO
[만들면서 배우는 생성 AI] 1장 - 생성 모델링
생성형 AI를 구현하기 위한 기본서로 '만들면서 배우는 생성 AI'라는 책을 공부하고 리뷰하도록 한다.
[Paper Review] Image style transfer using CNN
이번 포스팅에서는 CVPR 2016에 나온 style transfer 논문을 리뷰할 예정이다.해당 논문은 우리가 원하는 이미지를 원하는 그림 스타일(화풍)에 적용하는 방법을 제시한다.paper: https://openaccess.thecvf.com/conten
모두의 연구소 - 아이펠 리서치 과정 14주차
14주차 Going deeper의 마지막 주차이다. 하루에 한 노드씩 보기가 슬슬 버거워 질 때 즈음 going deeper가 마무리 돼서 다행이라고 생각했다. CV에서 사용되는 대부분의 task는 다뤄본 것 같아서 나름 뿌듯하기도 했다. 그럼에도 해당 task를
모두의 연구소 - 아이펠 리서치 과정 13주차
13주차 Going deeper의 2부가 시작됐다.. 12주차에 처음이자 마지막으로 있는 아이펠 방학을 지나고 맞이하는 2부여서 더 힘겹지만 열심히하려고 노력했다. 방학 때는 아이펠 내에서 취업에 대한 준비를 위해 개인적으로 찾아볼 수 있는 과제를 준다. 과제 수행을 위한 레퍼런스를 제공하여 취업에 대해 작게나마 고민하는 시간을 갖을 수 있어 좋았다. ...
모두의 연구소 - 아이펠 리서치 과정 12주차
드디어 Going deeper의 1부가 끝나는 주이다. 그래서 해당 내용을 기반으로 새로운 task를 주는데 이를 아이펠에서는 DLthon이라고 부른다. 어떤 major를 선택했는지에 따라 주제가 다르지만, CV에서는 segmentation task를 수행했다. 지난번
모두의 연구소 - 아이펠 리서치 과정 11주차
11주차 지난 주와 같이 Going Deeper라는 session으로 CV의 task를 다양하게 경험해 보고 공부하는 시간이 되었다. 논문을 가볍게 공부하고 이를 task에 적용하는 모델을 짜보는 것이 실습의 주요 목표가 되었지만, 나는 개인적으로 스스로의 힘으로 모델
모두의 연구소 - 아이펠 리서치 과정 10주차
대망의 10주차는 기다리고 기다리던 Going Deeper 노드를 시작하는 주이다. Going deeper에서 자신의 전공 (ex. CV / NLP)을 선택하여 특정 분야에 대해 공부할 수 있기 때문에 이 사실이 기대가 됐던 것 같다.고잉디퍼는 다음과 같이 진행된다.1
모두의 연구소 - 아이펠 리서치 과정 8주차
8주차 8주차는 지난 주에 시작한 "케창딥"을 계속해서 공부하는 주차였다. 하루에 한 챕터씩 공부를 하여 다음 날 퀘스트를 봐야한다. 한 챕터에 해당하는 양이 은근 많고, 챕터가 진행될 수록 내용이 어려워지기 때문에 이해하는 데에 시간이 더더욱 많이 걸렸다... >
모두의 연구소 - 아이펠 리서치 과정 7주차
7주차 7주차는 "딥러닝 한 번에 끝내기" 라는 노드를 2일 많에 끝내고, "케라스 창시자에게 배우는 딥러닝" (이하 케창딥) 이라는 딥러닝 책을 공부하기 시작하는 주이다. "딥러닝 한 번에 끝내기" 노드는 이틀만에 딥러닝 학습을 개괄적으로 다룬다. 개인적으로 크게